TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001700
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101317
出願日
2023-06-21
発明の名称
車両制御装置、車両制御方法、および車両制御プログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/16 20060101AFI20241226BHJP(信号)
要約
【課題】駐車場内での適切な制御を実行することが可能な車両制御装置を提供する。
【解決手段】自車両の周囲の駐車スペースの検出結果に基づいて、自車両の現在位置である自車両位置が駐車場内であることに関する信頼度を判定する信頼度判定を実行する、信頼度判定部503と、信頼度判定の結果を用いて、自車両位置が駐車場内である旨の駐車場内肯定判定、または自車両位置が駐車場内ではない旨の駐車場内否定判定のいずれかを決定する、自車両位置判定部504と、を備える。自車両位置判定部は、予め定められた肯定条件が成立する場合には、信頼度判定部による信頼度に関わらず駐車場内肯定判定を決定する。
【選択図】図3
特許請求の範囲
【請求項1】
車両制御装置であって、
自車両(C)の周囲の駐車スペース(PS)の検出結果に基づいて、前記自車両の現在位置である自車両位置が駐車場(PP)内であることに関する信頼度を判定する信頼度判定を実行する、信頼度判定部(503)と、
前記信頼度判定の結果を用いて、前記自車両位置が前記駐車場内である旨の駐車場内肯定判定、または前記自車両位置が前記駐車場内ではない旨の駐車場内否定判定のいずれかを決定する、自車両位置判定部(504)と、
を備え、
前記自車両位置判定部は、予め定められた肯定条件が成立する場合には、前記信頼度判定部による前記信頼度に関わらず前記駐車場内肯定判定を決定する、
車両制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記肯定条件は、
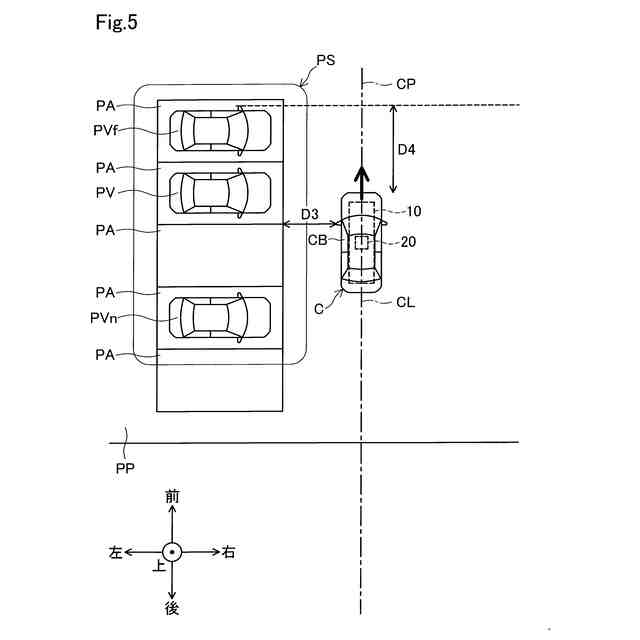
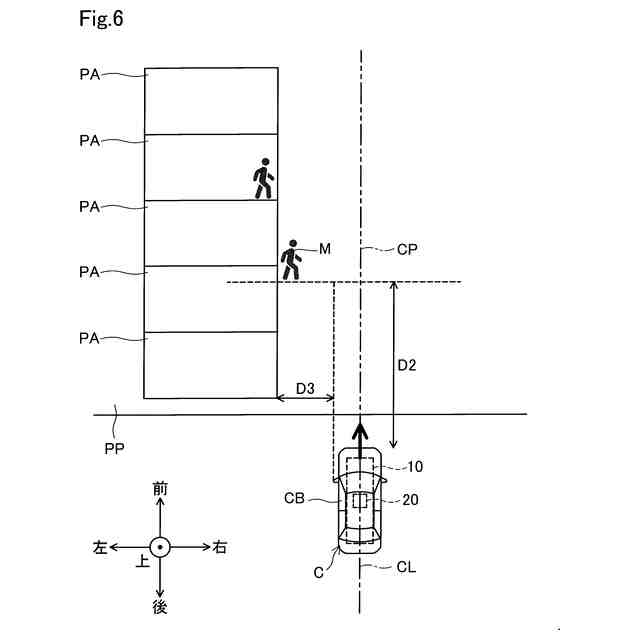
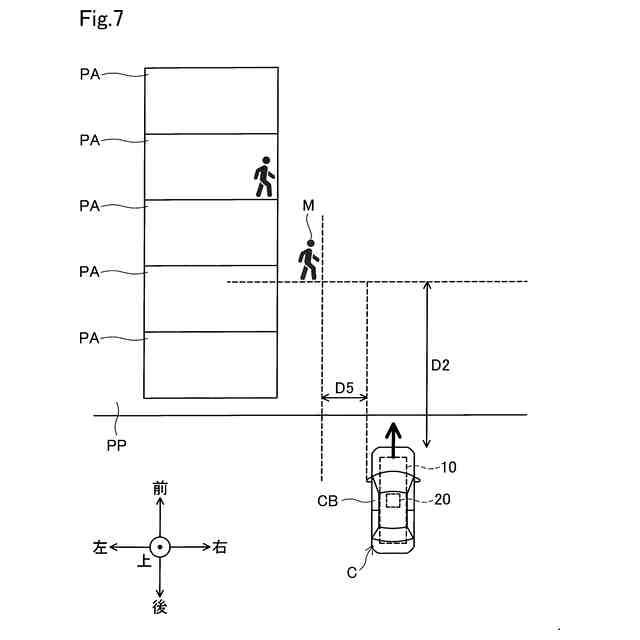
(条件a)自車両進路(CP)の一定距離内に前記駐車スペースが検知され、かつ、
前記自車両位置から予め定められた距離圏内であって、検知された前記駐車スペース、または、検知された前記駐車スペースと前記自車両進路との間のスペース、のうち少なくともいずれかのスペースに、障害物が検知されたこと、
を含む、請求項1に記載の車両制御装置。
【請求項3】
前記肯定条件は、
前記(条件a)に加えて、検知された前記駐車スペース内に、予め定められた規定台数以上の前記障害物としての車両が検出されたこと、をさらに含む、請求項2に記載の車両制御装置。
【請求項4】
前記自車両位置判定部は、予め定められた例外条件が成立する場合には、前記肯定条件が成立する場合であっても前記駐車場内否定判定を決定し、
前記例外条件は、
前記(条件a)を満たす前記駐車場内肯定判定が決定されたあとに、前記自車両進路の前記一定距離内に検知された前記駐車スペースにおいて最も奥に位置する前記障害物(PVf)から予め定められた規定距離手前の位置を、前記自車両が通過したこと、
を含む、請求項2または請求項3に記載の車両制御装置。
【請求項5】
前記自車両位置判定部は、予め定められた例外条件が成立する場合には、前記肯定条件が成立する場合であっても前記駐車場内否定判定を決定し、
前記例外条件は、
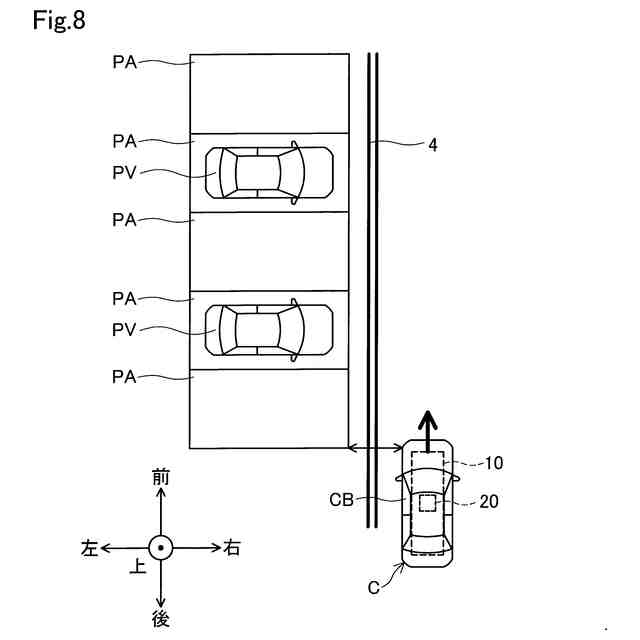
前記駐車場内肯定判定が決定されたあとに、自車両進路(CP)の前記一定距離内に検知された前記駐車スペースと、前記自車両進路との間に、検知された前記駐車スペースに亘って前記自車両進路の方向に連続した立体構造物が検知されたこと、
である、請求項1~請求項3のうちいずれか一項に記載の車両制御装置。
【請求項6】
車両制御装置であって、
自車両(C)の周囲の駐車スペース(PS)の検出結果に基づいて、前記自車両の現在位置である自車両位置が駐車場(PP)内であることに関する信頼度を判定する信頼度判定を実行する、信頼度判定部(503)と、
前記信頼度判定の結果を用いて、前記自車両の加速を抑制する加速抑制制御を実行する旨の加速抑制肯定判定、または前記自車両位置の加速を抑制する加速抑制制御を抑制する旨の加速抑制否定判定のいずれかを決定する、自車両挙動判定部(506)と、
を備え、
前記自車両挙動判定部は、予め定められた肯定条件が成立する場合には、前記信頼度判定部による前記信頼度に関わらず前記加速抑制肯定判定を決定する、
車両制御装置。
【請求項7】
前記肯定条件は、
(条件a)自車両進路(CP)の一定距離内に前記駐車スペースが検知され、かつ、
前記自車両位置から予め定められた距離圏内であって、検知された前記駐車スペース、または、検知された前記駐車スペースと前記自車両進路との間のスペース、のうち少なくともいずれかのスペースに、障害物が検知されたこと、
を含む、請求項6に記載の車両制御装置。
【請求項8】
前記肯定条件は、
前記(条件a)に加えて、検知された前記駐車スペース内に、予め定められた規定台数以上の前記障害物としての車両が検出されたこと、をさらに含む、請求項7に記載の車両制御装置。
【請求項9】
前記自車両挙動判定部は、予め定められた例外条件が成立する場合には、前記肯定条件が成立する場合であっても前記加速抑制否定判定を決定し、
前記例外条件は、
前記(条件a)を満たす前記加速抑制肯定判定が決定されたあとに、前記自車両進路の前記一定距離内に検知された前記駐車スペースにおいて最も奥に位置する前記障害物(PVf)から予め定められた規定距離手前の位置を、前記自車両が通過したこと、
を含む、請求項7または請求項8に記載の車両制御装置。
【請求項10】
前記自車両挙動判定部は、予め定められた例外条件が成立する場合には、前記肯定条件が成立する場合であっても前記加速抑制否定判定を決定し、
前記例外条件は、
前記加速抑制肯定判定が決定されたあとに、
自車両進路(CP)の前記一定距離内に検知された前記駐車スペースと、前記自車両進路との間に、検知された前記駐車スペースに亘って前記自車両進路の方向に連続した立体構造物が検知されたこと、
である、請求項6~請求項8のうちいずれか一項に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御方法、および車両制御プログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
例えば、駐車場内で車両の運転者がブレーキペダルと間違えてアクセルペダルを踏み込んでしまうと、運転者の意図に反して車両が加速してしまう。そこで、主にこのような踏み間違いによる急加速を抑制する目的で、自車両が駐車場内にあるか否かの判定が求められることがある。特許文献1に記載の装置では、自車両が駐車場内にあると判定された場合には、アクセルペダルの操作量が急増加した場合でも、運転者がアクセルペダルを誤操作したものと判定し、自車両の加速を抑制する加速抑制制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特許第6299179号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のように駐車場内においては、一般道を走行する時とは異なる制御を実行したい場面が存在する。しかし、実際には、駐車場内に適した制御が実行されないことがあった。本開示は、上記に例示した事情に鑑みてなされたものである。すなわち、本開示は、駐車場内での適切な制御を実行することが可能な技術を提供するものである。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、車両制御装置が提供される。この車両制御装置は、自車両(C)の周囲の駐車スペース(PS)の検出結果に基づいて、前記自車両の現在位置である自車両位置が駐車場(PP)内であることに関する信頼度を判定する信頼度判定を実行する、信頼度判定部(503)と、前記信頼度判定の結果を用いて、前記自車両位置が前記駐車場内である旨の駐車場内肯定判定、または前記自車両位置が前記駐車場内ではない旨の駐車場内否定判定のいずれかを決定する、自車両位置判定部(504)と、を備え、前記自車両位置判定部は、予め定められた肯定条件が成立する場合には、前記信頼度判定部による前記信頼度に関わらず前記駐車場内肯定判定を決定する。
この形態の車両制御装置によれば、原則、自車両位置判定部は、信頼度判定の結果を用いて、駐車場内肯定判定または駐車場内否定判定のいずれかを決定するが、予め定められた肯定条件が成立する場合には、信頼度に関わらず駐車場内肯定判定を決定する。このため、信頼度が低く、本来は駐車場内否定判定がなされる場面において駐車場内肯定判定が決定される機会を増やすことができる。すなわち、駐車場内において、より適切に駐車場内にあるか否かの判定を実行することが可能となる。
【図面の簡単な説明】
【0007】
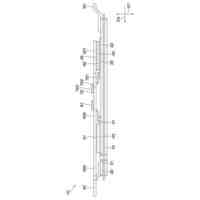
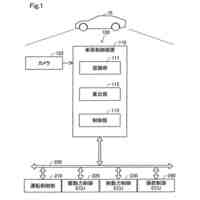
本開示の第1実施形態に係る車両制御装置を含む車載システムを搭載した自車両の概略構成を示す平面図である。
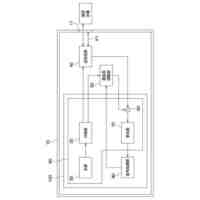
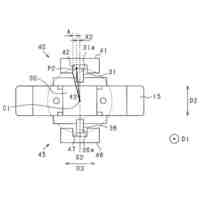
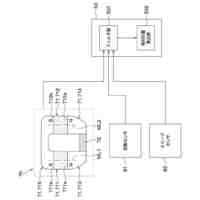
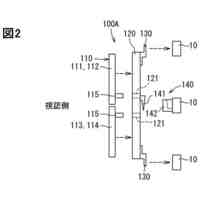
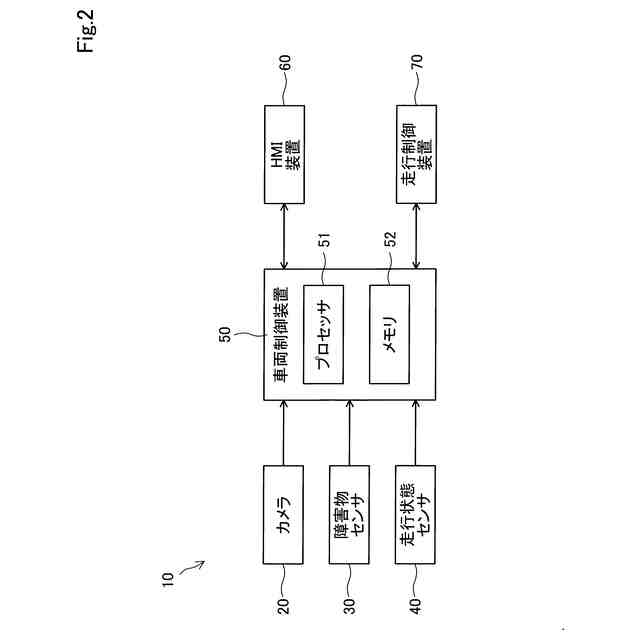
第1実施形態における車載システムの概略構成を模式的に示す平面図である。
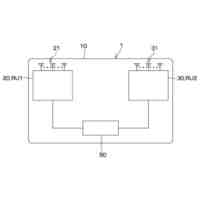
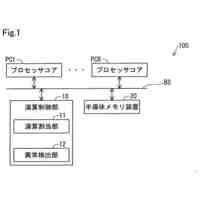
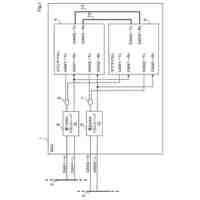
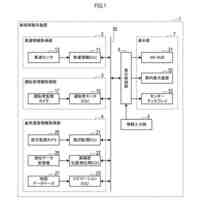
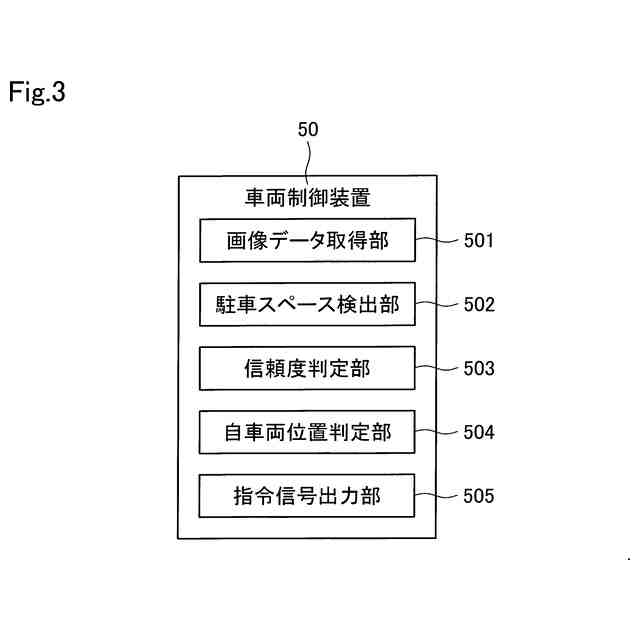
図2に示された車両制御装置によって実現される概略的な機能構成を示すブロック図である。
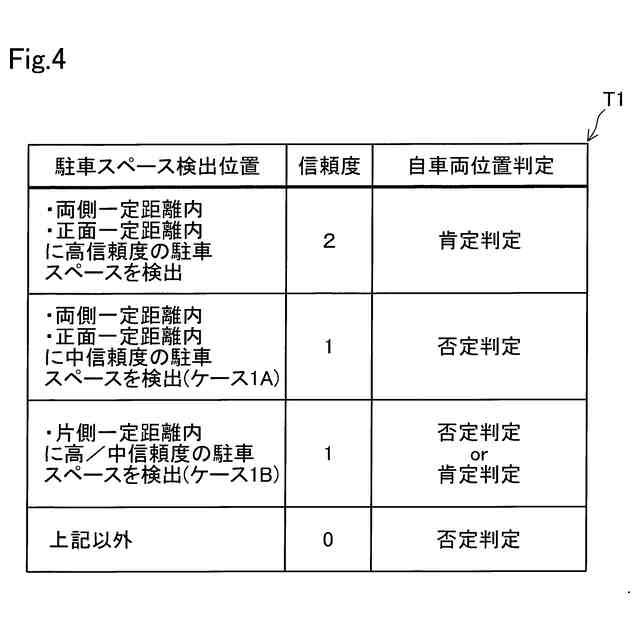
駐車スペースの検出位置、信頼度、および自車両位置判定の関係を説明するための図である。
図2に示された車両制御装置の動作概要を示す平面図である。
図2に示された車両制御装置の動作概要を示す平面図である。
図2に示された車両制御装置の動作概要を示す平面図である。
第2実施形態における、車両制御装置の動作概要を示す平面図である。
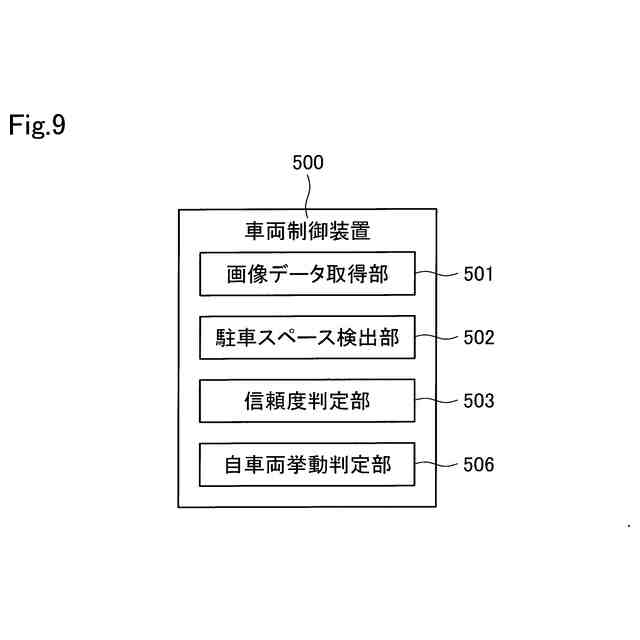
第4実施形態における車両制御装置によって実現される概略的な機能構成を示すブロック図である。
その他の実施形態における、車両制御装置の動作概要を示す平面図である。
その他の実施形態における、駐車スペースの検出位置、信頼度、および自車両位置判定の関係を説明するための図である。
その他の実施形態における、車両制御装置の動作手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、複数の実施形態について図面に基づいて説明する。
A.第1実施形態:
A1.車載システム10の構成:
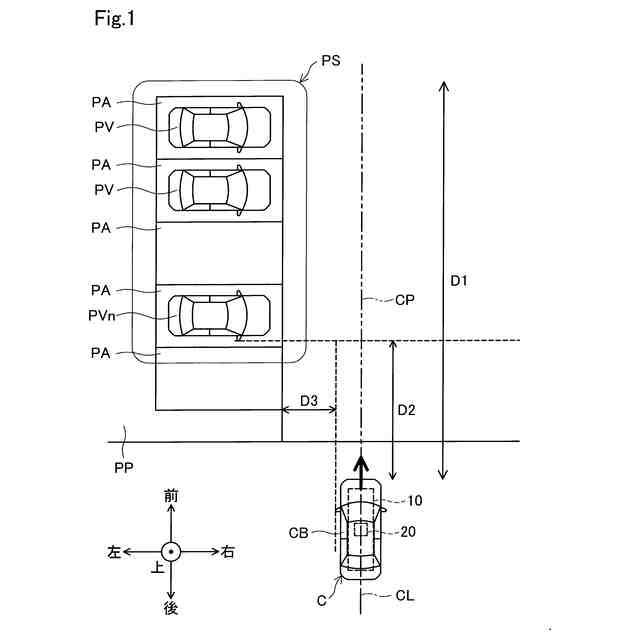
第1実施形態の構成について、図1~図7を参照しつつ説明する。第1実施形態の車載システム10は、自車両Cに搭載されている。本実施形態においては、自車両Cは、いわゆる四輪自動車であって、平面視にて略矩形状に形成された箱状の車体CBを備えている。「平面視」における自車両Cの各部分の形状は、自車両Cを走行可能に水平面に安定的に載置した状態で当該部分を重力作用方向と同一方向の視線で見た場合の形状を指すものである。
【0009】
以下、平面視にて、自車両Cの車幅方向における中心を通り、且つ自車両Cにおける車両全長方向と平行な仮想直線を、車幅中心線CLと呼ぶ。なお、車幅中心線CLは、車両中心線ともいう。図中、車幅中心線CLは、自車両Cが前進走行中である場合の自車両Cの進行方向を示すように、矢印で示されている。車両全長方向は、車幅方向と直交し且つ車高方向と直交する方向である。車高方向は、自車両Cの車高を規定する方向であって、自車両Cを走行可能に水平面に安定的に載置した場合の重力作用方向と平行な方向である。また、「前」「後」「左」「右」「上」を、図1中にて矢印で示された通りに定義する。すなわち、車両全長方向は、前後方向と同義である。また、車幅方向は、左右方向と同義である。さらに、自車両Cが前進走行中である場合の、自車両Cの進行予定経路を、自車両進路CPとして図中二点鎖線で示している。
【0010】
車載システム10は、カメラ20や障害物センサ30(図2参照)を用いて自車両Cの周囲の物標を検出するとともに、かかる物標の検出結果に基づいて自車両Cにおける挙動制御や乗員への情報通知動作を実行するように構成されている。より詳細には、車載システム10は、カメラ20よる自車両Cの周囲の画像の撮像結果に基づく、自車両Cの周囲の駐車スペースPSまたは駐車車両PVの検出結果に基づいて、自車両位置が駐車場PPであるか否かを判定可能な構成を有している。挙動制御とは、例えば、自車両Cの走行モードごとに設定された制御を指す。具体的には、自車両位置が駐車場PP内であると判定された場合には駐車場モードとし、後述する加速抑制制御が実行される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
22日前
株式会社デンソー
回転子
29日前
株式会社デンソー
生体電極
15日前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
電子装置
29日前
株式会社デンソー
回転電機
2日前
株式会社デンソー
整流回路
16日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
光干渉計
1日前
株式会社デンソー
駆動回路
23日前
株式会社デンソー
検出装置
3日前
株式会社デンソー
送受信装置
2日前
株式会社デンソー
半導体装置
17日前
株式会社デンソー
半導体装置
24日前
株式会社デンソー
電磁継電器
29日前
株式会社デンソー
半導体装置
22日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
レーダ装置
29日前
株式会社デンソー
電磁継電器
15日前
株式会社デンソー
半導体装置
29日前
株式会社デンソー
レーダ装置
29日前
株式会社デンソー
慣性センサ
29日前
株式会社デンソー
輻射ヒータ
29日前
株式会社デンソー
電力変換装置
29日前
株式会社デンソー
演算システム
1日前
株式会社デンソー
位置検出装置
1日前
株式会社デンソー
電力変換装置
29日前
株式会社デンソー
電子制御装置
3日前
株式会社デンソー
血流促進装置
22日前
株式会社デンソー
車両制御装置
1日前
株式会社デンソー
負荷駆動装置
24日前
株式会社デンソー
異常検出装置
22日前
株式会社デンソー
コンデンサ装置
22日前
株式会社デンソー
車両用空調装置
29日前
株式会社デンソー
車両用表示装置
15日前
株式会社デンソー
車両用表示装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ