TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024172912
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090967
出願日
2023-06-01
発明の名称
慣性センサ
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01C
19/5677 20120101AFI20241205BHJP(測定;試験)
要約
【課題】ホールアングルモードでの動作時における角度検知の精度低下を抑制可能な慣性センサとする。
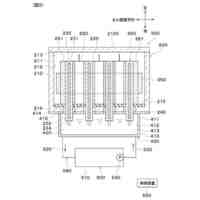
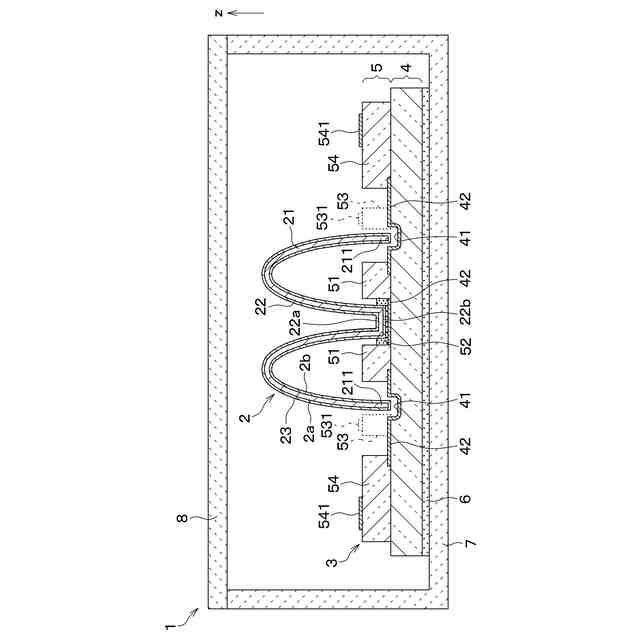
【解決手段】慣性センサ1は、第一駆動モードと第二駆動モードとを有する共振器2と、共振器2を囲む複数の電極部53を有する実装基板3と、共振器2を振動させるアクチュエータ6を備える。アクチュエータ6は、実装基板3のなす平面に対して直交する方向をz方向として、z方向に振動することで、共振器2をz方向に振動させて共振モードを生じさせる。
【選択図】図1
特許請求の範囲
【請求項1】
慣性センサであって、
第一駆動モードと第二駆動モードとを有する共振器(2)と、
互いに距離を隔てて配置され、前記共振器を囲む複数の電極部(53)を有する実装基板(3)と、
前記実装基板のなす平面に対して直交する方向をz方向として、前記z方向に振動するアクチュエータ(6)とを備え、
前記アクチュエータは、前記共振器を前記z方向に振動させることで共振モードを生じさせる、慣性センサ。
続きを表示(約 600 文字)
【請求項2】
前記アクチュエータは、前記第一駆動モードもしくは前記第二駆動モードを励起する共振周波数で前記共振器を振動させる、請求項1に記載の慣性センサ。
【請求項3】
前記アクチュエータは、前記実装基板のうち前記共振器と向き合う面とは反対面に配置されている、請求項2に記載の慣性センサ。
【請求項4】
前記アクチュエータは、前記共振器と前記実装基板との間に配置されている、請求項2に記載の慣性センサ。
【請求項5】
前記アクチュエータは、前記実装基板の一部として構成されている、請求項2に記載の慣性センサ。
【請求項6】
前記共振器および前記実装基板が収納される筐体(7)と、
前記筐体の開口部を塞ぐ蓋材(8)と、をさらに備え、
前記アクチュエータは、前記筐体および前記蓋材で構成されるパッケージの一部に接触する位置に配置されている、請求項2に記載の慣性センサ。
【請求項7】
前記共振器は、円形状または環状とされた二次元対称構造である、請求項1または2に記載の慣性センサ。
【請求項8】
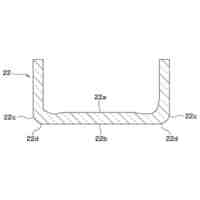
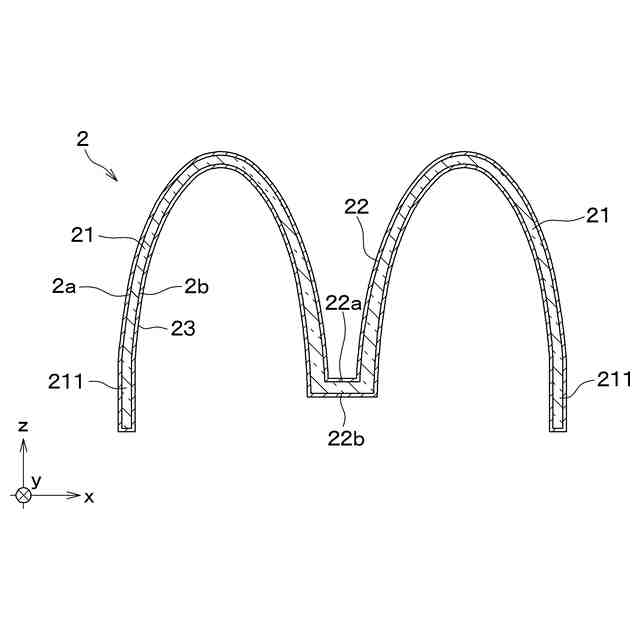
前記共振器は、半球形状の三次元曲面を有する曲面部(21)と、前記曲面部から前記半球形状の中心に向かって延設された接続部(22)とを有する三次元対称構造である、請求項1または2に記載の慣性センサ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、慣性センサに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、車両の自動運転のシステム開発が進められており、この種のシステムでは、高精度の自己位置の推定技術が必要である。例えば、いわゆるレベル3の自動運転向けに、GNSSとIMUとを備える自己位置推定システムの開発が進められている。GNSSとは、Global Navigation Satellite Systemの略称である。IMUは、Inertial Measurement Unitの略称であり、例えば、3軸のジャイロセンサと3軸の加速度センサから構成される6軸の慣性センサである。将来的に、いわゆるレベル4以上の自動運転を実現するためには、現状よりもさらに高精度のIMUが求められる。
【0003】
このような慣性センサとしては、例えば、特許文献1に記載のものが挙げられる。特許文献1に記載の慣性センサは、振動体である共振器と、共振器を中心とする周方向に沿って互いに離れて配置され、所定距離を隔てて共振器を囲む複数の電極とが形成された基板を備える。この慣性センサは、複数の電極の一部からの静電気力により、共振器を基板の平面方向において第1の振動モードおよび第2の振動モードで共振させ、共振器と複数の電極との間における静電容量の変化に基づいて、共振器に印加される回転の角度を検出する。
【先行技術文献】
【特許文献】
【0004】
米国特許第10520331号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の慣性センサは、ホールアングルモードで動作させるため、共振器の振幅を一定にする制御、第1駆動軸と第2駆動軸との直交誤差をゼロにする制御、計測した角度をフィードバックする制御、および共振を維持する制御が必要となる。このホールアングルモードでの制御においては、振動定在波の向きを求める際の誤差、計算の時間遅延、第1駆動軸および第2駆動軸の駆動ゲイン差によるドリフトなどの影響により角度検知精度が低下しうる。
【0006】
本開示は、ホールアングルモードでの動作時における角度検知の精度低下を抑制可能な慣性センサを提供することを目的とする。
【課題を解決するための手段】
【0007】
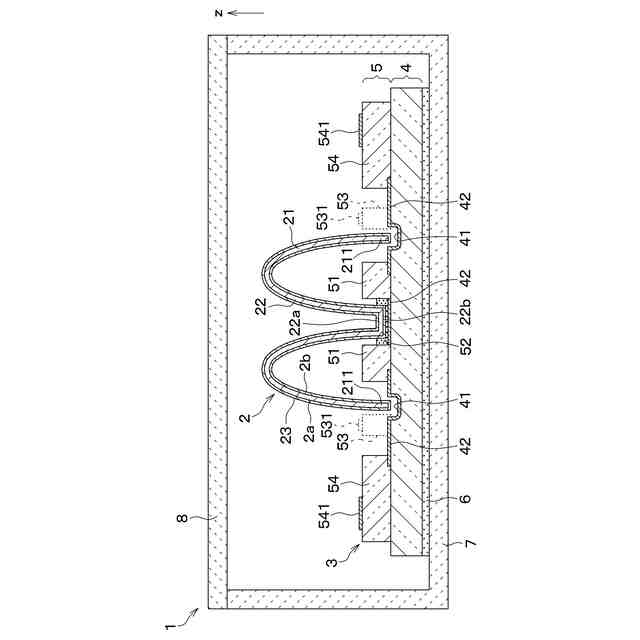
本開示の1つの観点による慣性センサは、第一駆動モードと第二駆動モードとを有する共振器(2)と、互いに距離を隔てて配置され、共振器を囲む複数の電極部(53)を有する実装基板(3)と、実装基板のなす平面に対して直交する方向をz方向として、z方向に振動するアクチュエータ(6)とを備え、アクチュエータは、共振器をz方向に振動させることで共振モードを生じさせる。
【0008】
これによれば、第一駆動モードと第二駆動モードとを有する共振器と、これを囲む複数の電極部を有する実装基板と、共振器をz方向に励振させるアクチュエータとを備える慣性センサとなる。この慣性センサは、共振器を実装基板のなす平面方向、すなわちxy方向に沿った外力でなく、アクチュエータが当該平面方向に直交するz方向に振動することで共振器をz方向に振動させ、共振モードを生じさせる。このため、xy平面に沿った方向であって、共振器の駆動時における振動の回転方向を妨げることなく、アクチュエータが共振器に振動エネルギーを与えることが可能な構成の慣性センサとなっている。よって、この慣性センサは、ホールアングルモードでの動作時における角度検知の精度低下を抑制可能となる。
【0009】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0010】
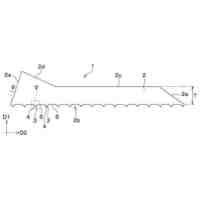
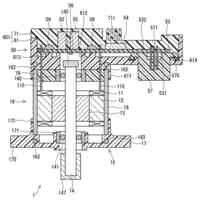
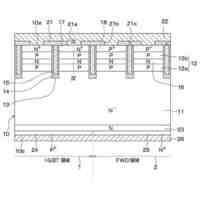
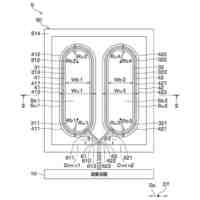
第1実施形態の慣性センサを示す断面図である。
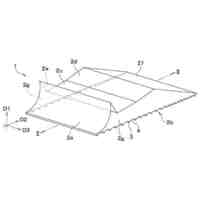
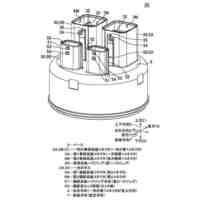
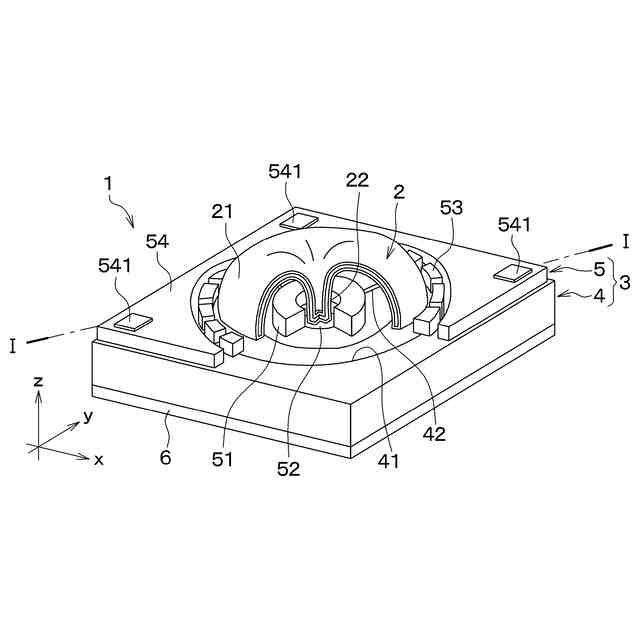
図1の慣性センサのうちパッケージに収納される部分を示す斜視断面図である。
図1の慣性センサに搭載される共振器の一例を示す断面図である。
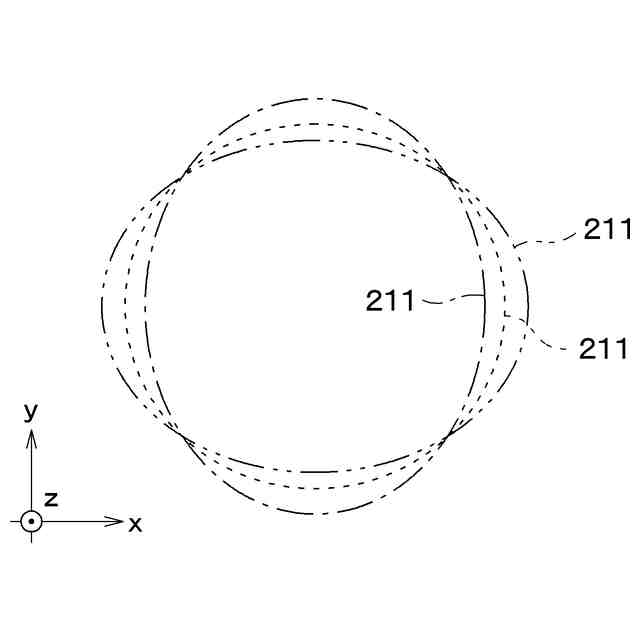
図3の共振器の動作時の振動状態についての説明図である。
図4Aの共振器の振動状態を上面視した模式図である。
共振器の振動状態における第一駆動モードおよび第二駆動モードについての説明図である。
図1の慣性センサにおける共振器の振動モードおよび当該振動モードにおける2つの駆動モード、並びに検出電極の一例を示す図である。
図4Bに相当する図であって、共振器の他の振動状態を上面視した模式図である。
図4Cに相当する図であって、図4Eの共振器の振動状態における2つのモードについての説明図である。
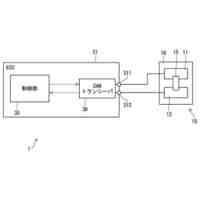
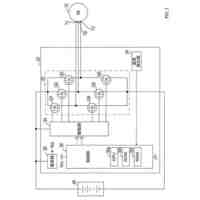
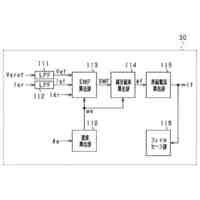
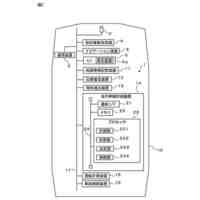
第1実施形態の慣性センサを含むホールアングルモードの制御回路を示すブロック図である。
比較例の慣性センサを示す断面図である。
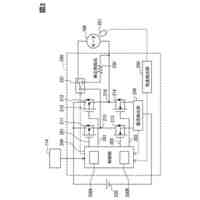
比較例の慣性センサを含むホールアングルモードの制御回路を示すブロック図である。
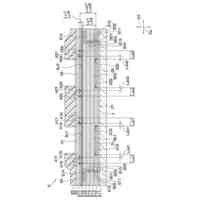
第2実施形態の慣性センサを示す断面図である。
第3実施形態の慣性センサを示す断面図である。
第4実施形態の慣性センサを示す断面図である。
第5実施形態の慣性センサを示す断面図である。
第6実施形態の慣性センサを示す断面図である。
第7実施形態の慣性センサを示す断面図である。
第8実施形態の慣性センサを示す断面図である。
第9実施形態の慣性センサを示す断面図である。
図15の慣性センサにおける共振器の振動モードおよび当該振動モードにおける2つの駆動モード、並びに検出電極の一例を示す図である。
第9実施形態の慣性センサの変形例における共振器の振動モードおよび当該振動モードにおける2つの駆動モード、並びに検出電極の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
光学部材
4日前
株式会社デンソー
光学部材
11日前
株式会社デンソー
駆動装置
11日前
株式会社デンソー
駆動装置
11日前
株式会社デンソー
測距装置
11日前
株式会社デンソー
測距装置
4日前
株式会社デンソー
検出装置
17日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
輻射ヒータ
10日前
株式会社デンソー
半導体装置
4日前
株式会社デンソー
物体検知装置
12日前
株式会社デンソー
潅水システム
17日前
株式会社デンソー
走路認識装置
4日前
株式会社デンソー
信号処理装置
11日前
株式会社デンソー
電池モジュール
11日前
株式会社デンソー
モータ駆動装置
11日前
株式会社デンソートリム
モータ制御装置
5日前
株式会社デンソー
信号伝送デバイス
17日前
株式会社デンソーウェーブ
流通管理システム
11日前
株式会社デンソー
信号伝送デバイス
17日前
株式会社デンソー
冷凍サイクル装置
4日前
株式会社デンソー
巻線界磁型回転電機
11日前
株式会社デンソー
巻線界磁型回転電機
11日前
株式会社デンソー
カード挿入システム
4日前
株式会社デンソー
半導体装置の製造方法
11日前
株式会社デンソー
運転状況管理システム
12日前
株式会社デンソー
半導体装置の製造方法
5日前
株式会社デンソー
電力変換装置の制御装置
3日前
株式会社デンソー
巻線界磁ロータ、回転電機
10日前
株式会社デンソー
微小振動体およびその製造方法
10日前
株式会社デンソー
回転電機の制御装置、プログラム
17日前
矢崎総業株式会社
コネクタ構造体
4日前
株式会社デンソー
集合基板及び集合基板の帯電防止方法
3日前
株式会社デンソー
画像送信装置および画像表示システム
10日前
トヨタ自動車株式会社
車両制御装置
11日前
株式会社デンソー
レーダ装置および信号処理プログラム
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ