TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001440
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023101033
出願日
2023-06-20
発明の名称
制御装置及び制御方法
出願人
学校法人法政大学
代理人
個人
,
個人
,
個人
主分類
G06F
3/01 20060101AFI20241225BHJP(計算;計数)
要約
【課題】ユーザの身体運動をより簡便な構成で抑制することが可能な制御装置を提供する。
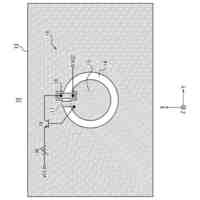
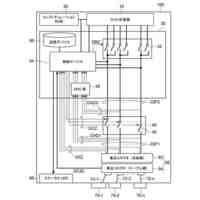
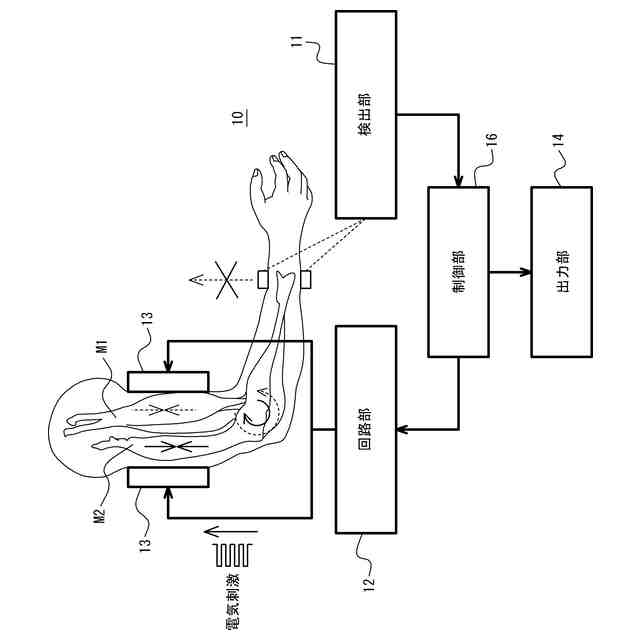
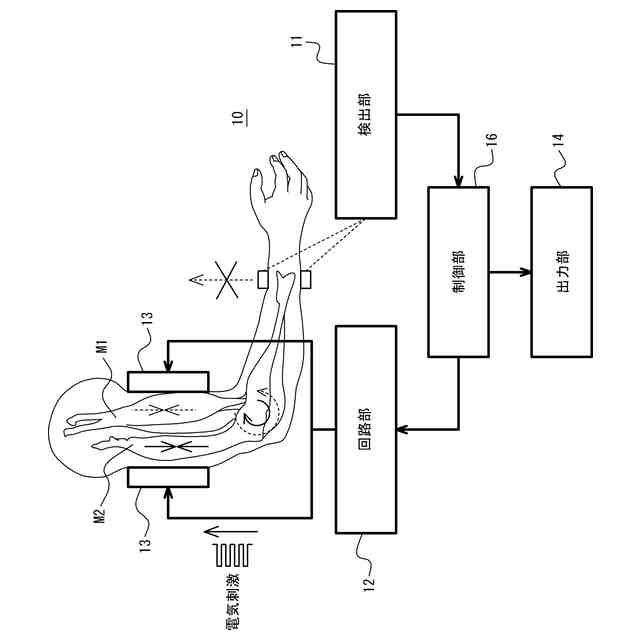
【解決手段】制御装置10は、ユーザの身体運動を抑制する制御装置10であって、ユーザの身体運動を検出して身体運動の運動情報を出力する検出部11と、検出部11から出力された運動情報に基づいて刺激パラメータを算出する制御部16と、制御部16で算出された刺激パラメータに従って身体運動を抑制する筋肉に対し電気刺激を与える刺激部13と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ユーザの身体運動を抑制する制御装置であって、
前記ユーザの身体運動を検出して前記身体運動の運動情報を出力する検出部と、
前記検出部から出力された前記運動情報に基づいて刺激パラメータを算出する制御部と、
前記制御部で算出された前記刺激パラメータに従って前記身体運動を抑制する筋肉に対し電気刺激を与える刺激部と、
を備える、
制御装置。
続きを表示(約 940 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記刺激部は、収縮することで前記身体運動を生じさせている主動筋と反対側に位置する前記筋肉に対し配置されている、
制御装置。
【請求項3】
請求項1又は2に記載の制御装置であって、
前記制御部は、前記運動情報を用いたフィードバック制御系に従って前記刺激パラメータを算出する、
制御装置。
【請求項4】
請求項3に記載の制御装置であって、
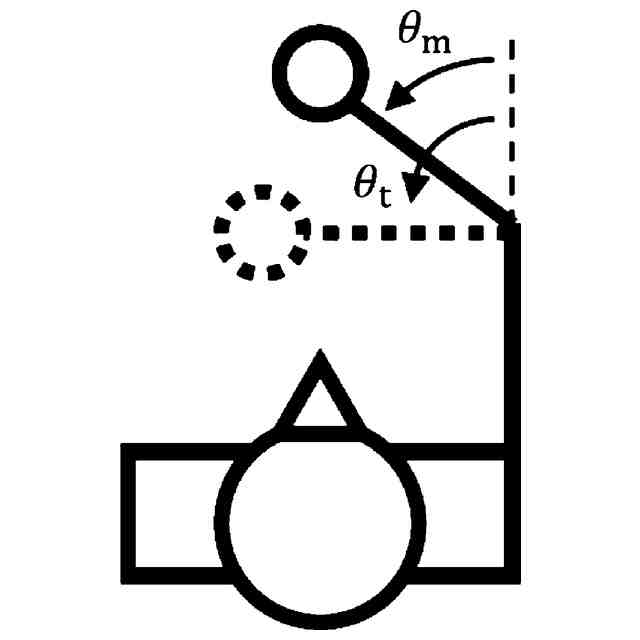
前記検出部は、角度センサを含み、
前記運動情報は、前記身体運動が生じている身体の一部の関節角度を含む、
制御装置。
【請求項5】
請求項4に記載の制御装置であって、
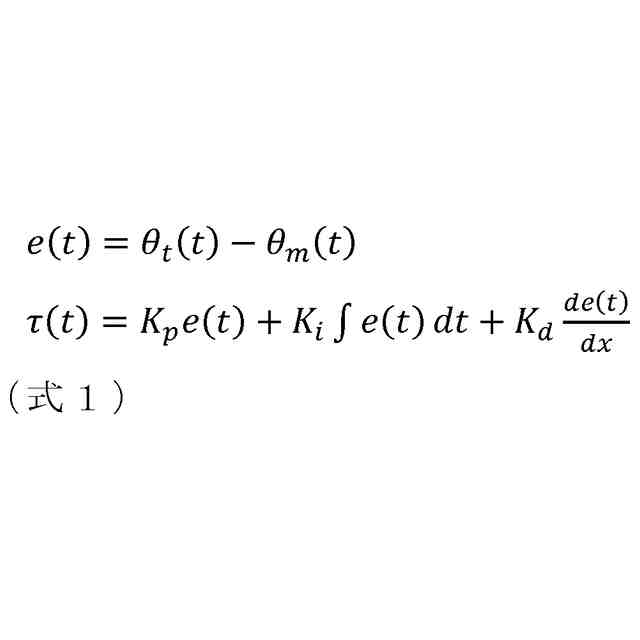
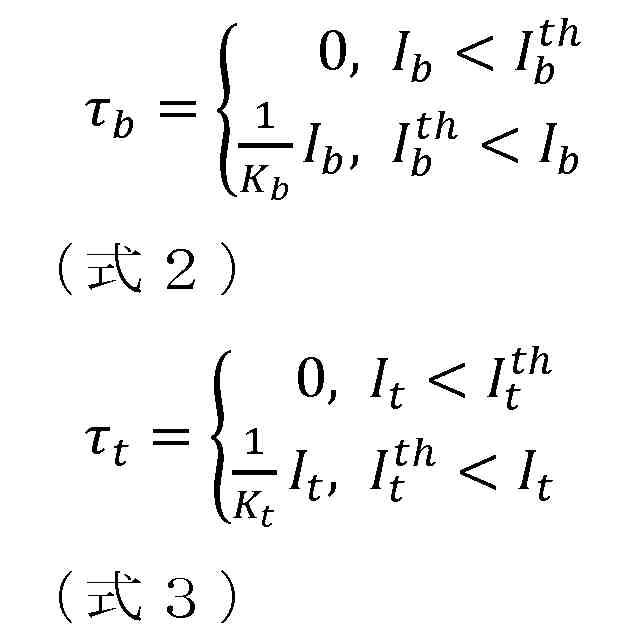
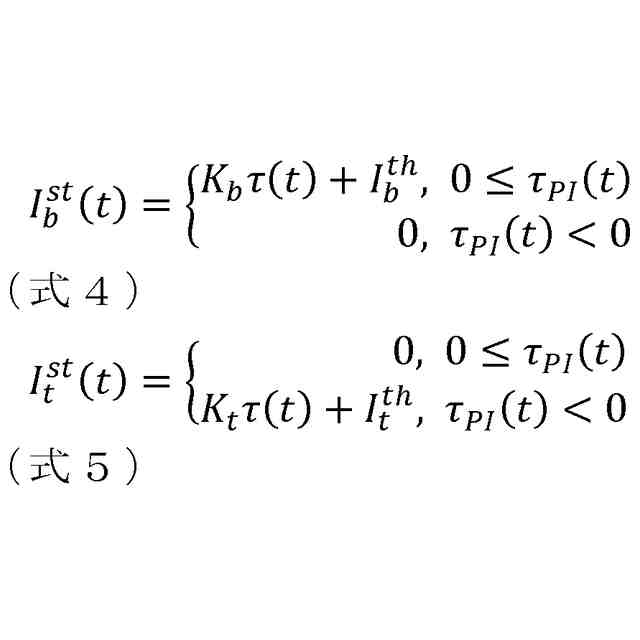
前記制御部は、前記関節角度を制御量とし、前記身体の一部の関節トルクを操作量として前記刺激パラメータを算出する、
制御装置。
【請求項6】
請求項5に記載の制御装置であって、
前記制御部は、前記身体運動における前記ユーザの運動意図を反映した運動を操作体で実現するための制御情報を、前記関節トルクに基づいて生成する、
制御装置。
【請求項7】
請求項6に記載の制御装置であって、
前記操作体は、仮想空間上に存在する仮想体を含む、
制御装置。
【請求項8】
請求項7に記載の制御装置であって、
前記運動意図を反映した運動を行う前記仮想体を画像として表示する出力部をさらに備える、
制御装置。
【請求項9】
請求項3に記載の制御装置であって、
前記フィードバック制御系は、PID制御系を含む、
制御装置。
【請求項10】
ユーザの身体運動を抑制する制御方法であって、
前記ユーザの身体運動を検出して前記身体運動の運動情報を出力することと、
出力された前記運動情報に基づいて刺激パラメータを算出することと、
算出された前記刺激パラメータに従って前記身体運動を抑制する筋肉に対し電気刺激を与えることと、
を含む、
制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置及び制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、ユーザの身体運動におけるユーザ自身の運動意図を反映した運動を仮想体などの操作体で実現するための技術が知られている。例えば、特許文献1には、人体の少なくとも一部の動作を模擬して動作することができる仮想体を、狭い実空間に人体があっても問題なく動作させる仮想体の動作制御システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-077374号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の従来技術では、狭い実空間でユーザの身体運動を抑制するために、ユーザの全身を固定する必要があった。これに伴い、装置が大型化及び大重量化していた。
【0005】
本開示は、ユーザの身体運動をより簡便な構成で抑制することが可能な制御装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するための第1の観点による制御装置は、
ユーザの身体運動を抑制する制御装置であって、
前記ユーザの身体運動を検出して前記身体運動の運動情報を出力する検出部と、
前記検出部から出力された前記運動情報に基づいて刺激パラメータを算出する制御部と、
前記制御部で算出された前記刺激パラメータに従って前記身体運動を抑制する筋肉に対し電気刺激を与える刺激部と、
を備える。
【0007】
第2の観点による制御方法は、
ユーザの身体運動を抑制する制御方法であって、
前記ユーザの身体運動を検出して前記身体運動の運動情報を出力することと、
出力された前記運動情報に基づいて刺激パラメータを算出することと、
算出された前記刺激パラメータに従って前記身体運動を抑制する筋肉に対し電気刺激を与えることと、
を含む。
【発明の効果】
【0008】
本開示の一実施形態に係る制御装置及び制御方法によれば、ユーザの身体運動をより簡便な構成で抑制することが可能である。
【図面の簡単な説明】
【0009】
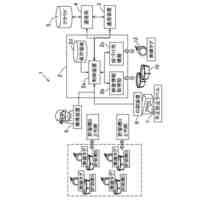
本開示の一実施形態に係る制御装置の構成の概要を示す模式図である。
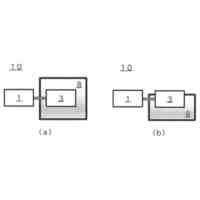
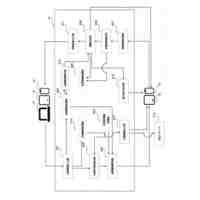
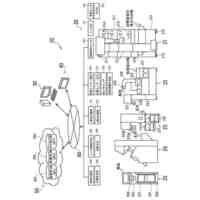
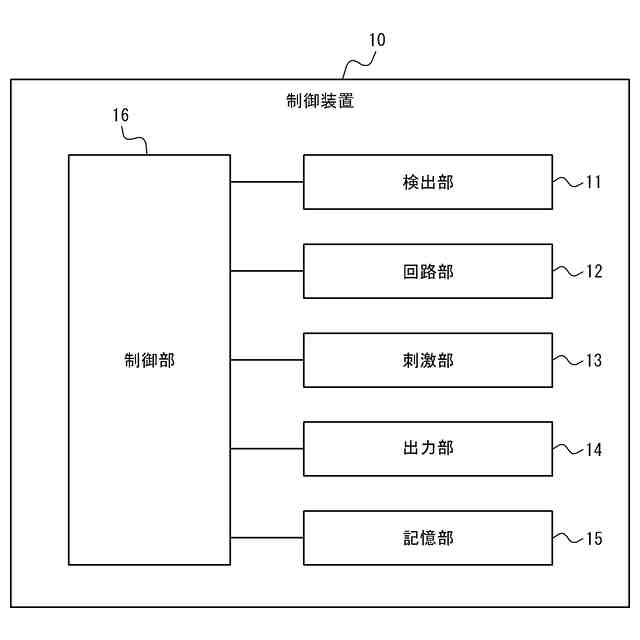
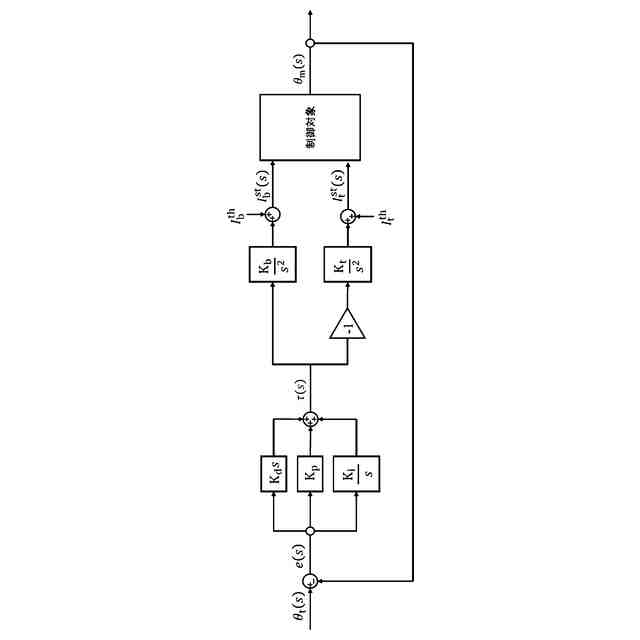
図1の制御装置の構成の一例を示すブロック図である。
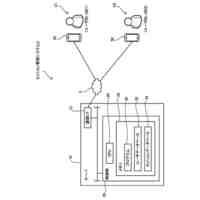
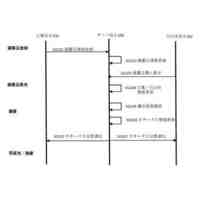
図1の制御装置による処理の第1例を説明するための第1図である。
図1の制御装置による処理の第1例を説明するための第2図である。
図1の制御装置による処理の第1例を説明するための第3図である。
図1の制御装置による処理の第1例を説明するための第4図である。
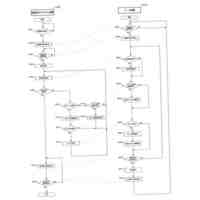
図1の制御装置による処理の第2例を説明するための第1図である。
図1の制御装置による処理の第2例を説明するための第2図である。
図1の制御装置による処理の第3例を説明するための第3図である
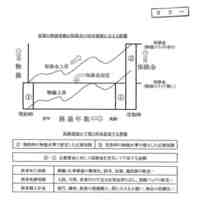
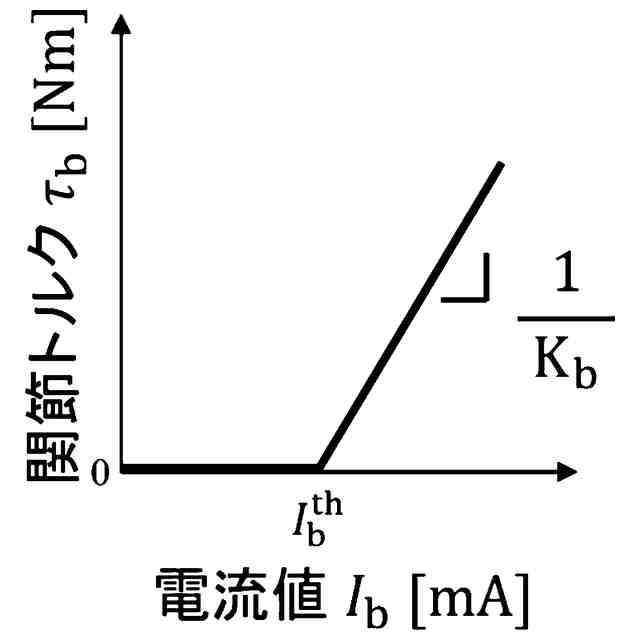
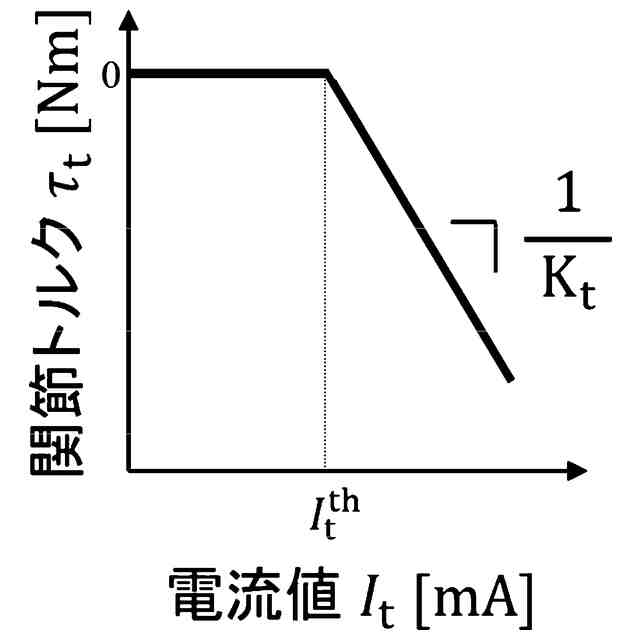
図1の制御装置による機能の一例を説明するためのグラフ図である。
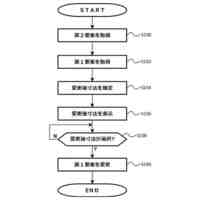
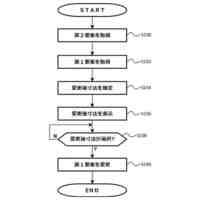
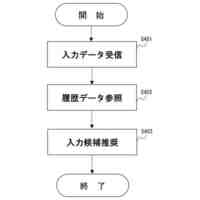
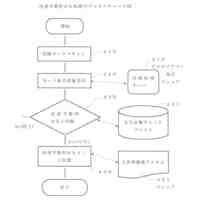
図1の制御装置により実行される制御方法の一例を説明するためのフローチャートである。
【発明を実施するための形態】
【0010】
従来技術の背景及び問題点についてより詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人法政大学
誘電率測定装置
20日前
学校法人法政大学
装着型アシスト装置
3か月前
学校法人法政大学
移動体及び無線給電システム
3か月前
学校法人法政大学
金属資源の乾式精錬方法及び乾式精錬装置
1か月前
学校法人法政大学
情報処理装置、情報処理システム、及び情報処理方法
19日前
株式会社ダイヘン
受電装置及びワイヤレス給電システム
1か月前
学校法人法政大学
磁化推定装置、磁化推定システム、磁化推定方法、学習モデルの生成方法、及びプログラム
1か月前
北日本海事興業株式会社
水中作業用パワーアシストスーツ駆動装置、およびパワーアシストスーツシステム
5か月前
個人
対話装置
1か月前
個人
裁判のAI化
10日前
個人
情報処理装置
1か月前
個人
情報処理システム
17日前
個人
検査システム
19日前
個人
記入設定プラグイン
1か月前
個人
情報処理装置
1か月前
個人
設計支援システム
2日前
個人
設計支援システム
2日前
個人
情報入力装置
1か月前
個人
不動産売買システム
25日前
株式会社サタケ
籾摺・調製設備
18日前
キヤノン電子株式会社
携帯装置
18日前
株式会社カクシン
支援装置
5日前
個人
物価スライド機能付生命保険
1か月前
個人
マイホーム非電子入札システム
1か月前
個人
備蓄品の管理方法
17日前
サクサ株式会社
中継装置
18日前
キヤノン株式会社
情報処理装置
18日前
株式会社BONNOU
管理装置
1か月前
キヤノン株式会社
情報処理装置
18日前
アスエネ株式会社
排水量管理方法
18日前
キヤノン電子株式会社
名刺管理システム
19日前
東洋電装株式会社
操作装置
18日前
東洋電装株式会社
操作装置
18日前
株式会社東芝
電子機器
26日前
株式会社ワコム
電子消去具
25日前
個人
決済手数料0%のクレジットカード
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ