TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175366
公報種別
公開特許公報(A)
公開日
2024-12-18
出願番号
2023093101
出願日
2023-06-06
発明の名称
点群選択装置、点群選択方法及びプログラム
出願人
KDDI株式会社
代理人
フェリシテ弁理士法人
主分類
G06T
17/00 20060101AFI20241211BHJP(計算;計数)
要約
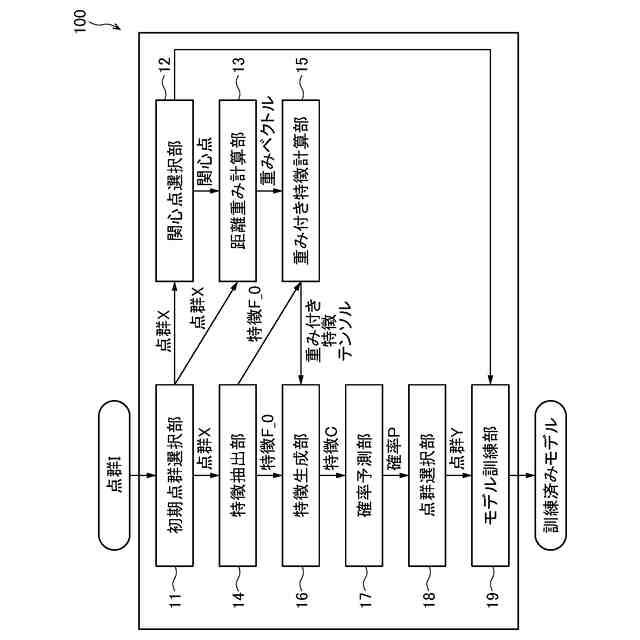
【課題】物体の表面の復元において高い復元精度を実現可能なモデルを生成すること。
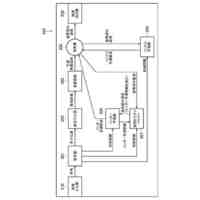
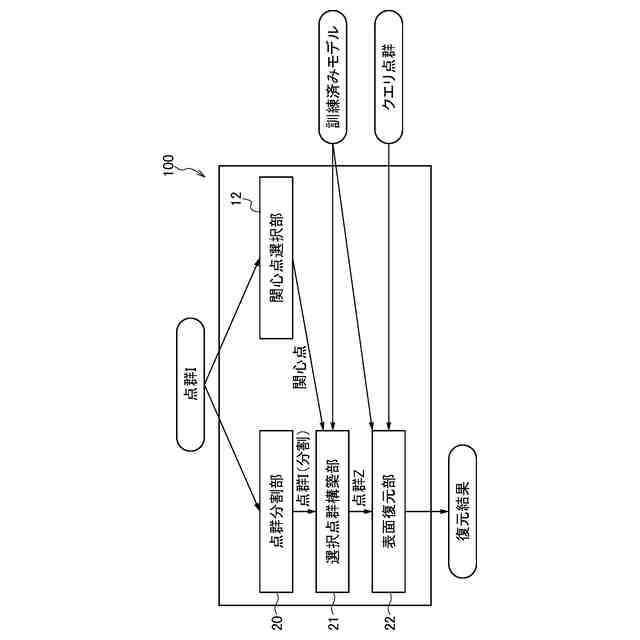
【解決手段】本発明に係る点群選択装置100は、点群から関心点を選択する関心点選択部12と、点群から特徴を抽出する特徴抽出部14と、特徴から関心点に関する特徴を生成する特徴生成部16と、関心点に関する特徴に基づいて点群から一部の点を選択する点群選択部18とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
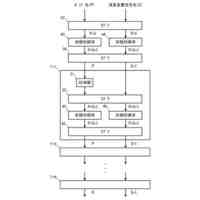
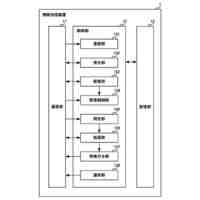
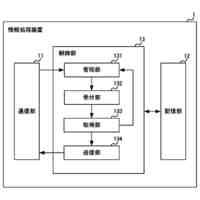
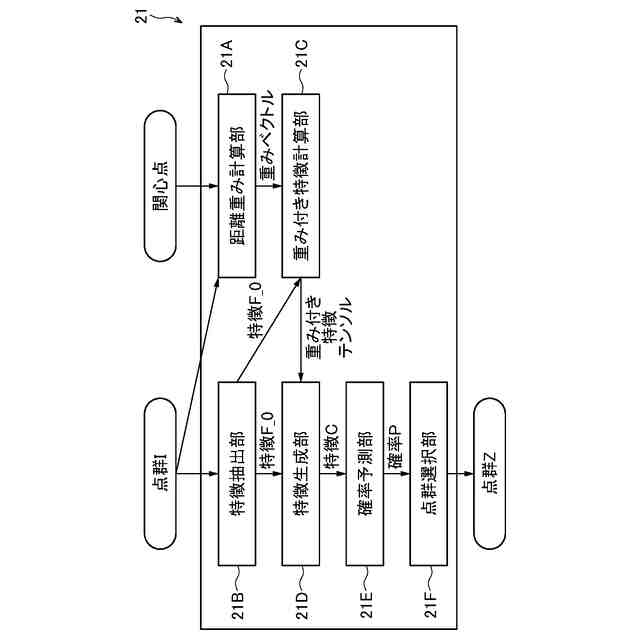
点群選択装置であって、
点群から関心点を選択する関心点選択部と、
前記点群から特徴を抽出する特徴抽出部と、
前記特徴から前記関心点に関する特徴を生成する特徴生成部と、
前記関心点に関する特徴に基づいて前記点群から一部の点を選択する点群選択部と、を有することを特徴とする点群選択装置。
続きを表示(約 1,100 文字)
【請求項2】
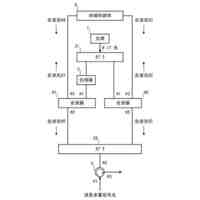
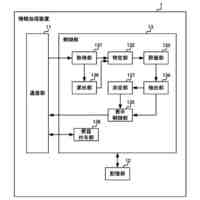
前記関心点から前記点群の各点までの距離に応じた重みを計算する距離重み計算部と、
前記重みと前記特徴とから重み付き特徴を計算する重み付き特徴計算部と、を有し、
前記特徴生成部は、前記特徴と前記重み付き特徴とを結合することで、前記関心点に関する特徴を生成することを特徴とする請求項1に記載の点群選択装置。
【請求項3】
前記関心点に関する特徴から選択確率を予測する確率予測部を更に有し、
前記点群選択部は、前記選択確率を用いて、前記点群から一部の点を選択することを特徴とする請求項1に記載の点群選択装置。
【請求項4】
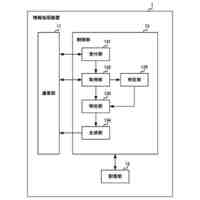
前記点群から分割された点群を生成する点群分割部と、
前記分割された点群から個別に選択した点群の和集合を取ることで選択された点群を構築する選択点群構築部と、
前記選択された点群を用いて、物体の表面の復元を行う表面復元部と、を有することを特徴とする請求項1に記載の点群選択装置。
【請求項5】
前記点群分割部は、前記点群からの反復的な点の選択によって、前記分割された点群を生成することを特徴とする請求項4に記載の点群選択装置。
【請求項6】
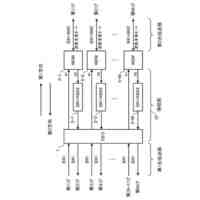
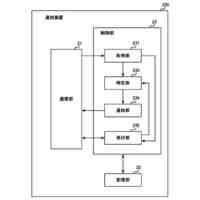
前記関心点に関する特徴から選択確率を予測する確率予測部と、
前記確率予測部で予測された前記選択確率、前記点群選択部で選択された前記一部の点、前記関心点選択部で選択された関心点、及び、前記表面復元部で復元された情報の少なくとも一部を用いて損失を計算して、モデルを訓練するモデル訓練部と、を有することを特徴とする請求項4に記載の点群選択装置。
【請求項7】
前記モデル訓練部は、前記モデルとして、点群の選択のためのモデル及び物体の表面の復元のためのモデルを併用することを特徴とする請求項6に記載の点群選択装置。
【請求項8】
前記モデル訓練部は、前記点群の選択のためのモデル及び前記物体の表面の復元のためのモデルを、同時又は交互に最適化することを特徴とする請求項7に記載の点群選択装置。
【請求項9】
前記モデル訓練部は、前記点群選択のためのモデル及び前記物体の表面の復元のためのモデルの両方又は一方のみを最適化することを特徴とする請求項7に記載の点群選択装置。
【請求項10】
初期点群選択部を更に有し、
前記関心点選択部及び前記特徴抽出部に入力される前記点群は、前記初期点によって任意の選択方法で選択された点群であることを特徴とする請求項1に記載の点群選択装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、点群選択装置、点群選択方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、INR(Implicit Neural Representation)に基づく深層学習モデルを用いて点群から物体の表面を復元する技術が知られている(例えば、非特許文献1参照)。かかる技術では、通常、入力点群の密度が高いほど、物体の表面を高精度に復元することができる。
【0003】
ただし、上述の深層学習モデルの訓練時と推論時とで、入力点群の密度が異なる場合、データ分布の差異によって高い復元精度が得られない可能性がある。
【0004】
そのため、上述の深層学習モデルの推論時に高密度な点群を入力とする場合、上述の深層学習モデルの訓練時にも高密度な点群を入力とすることが望ましい。
【0005】
しかしながら、入力点群の密度を高めるほど、データ量が大きくなるため、上述の深層学習モデルの訓練時に使用するGPUのメモリ制限を超過する恐れがある。
【0006】
深層学習モデルの訓練時には、学習を安定させるためにミニバッチ学習法と呼ばれる複数のデータを一括で処理する手法が一般的に使用される。
【0007】
また、深層学習モデルの訓練時には、誤差逆伝搬法に基づいて深層学習モデルを更新するために、目的関数に対するモデルパラメータの勾配を計算する必要がある。そのため、深層学習モデルの訓練時には、深層学習モデルの推論時に比べて、点群一つあたりに使用可能なメモリ容量が更に制限される可能性がある。
【先行技術文献】
【非特許文献】
【0008】
A. Boulch and M. Renaud, "Poco: Point convolution for surface reconstruction," Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022
I. Lang, A. Manor, and S. Avidan, "Samplenet: Differentiable point cloud sampling," Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020.
R. A. Potamias, G. Bouritsas, and S. Zafeiriou, "Revisiting point cloud simplification: A learnable feature preserving approach," Computer Vision-ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23-27, 2022, Proceedings, Part II. Cham: Springer Nature Switzerland, 2022.
【発明の概要】
【発明が解決しようとする課題】
【0009】
点群のデータ量を削減するための前処理として、入力点群から無作為に指定個数の点を選択するランダムサンプリング法が広く利用されている。
【0010】
また、指定個数の点を空間的に一様に選択するFPS(Farthest Point Sampling)法も同様に広く利用されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
KDDI株式会社
光増幅器
21日前
KDDI株式会社
光増幅器
21日前
KDDI株式会社
光接続ノード
21日前
KDDI株式会社
緊急ネットワーク分離方法
22日前
KDDI株式会社
基地局及び基地局の制御方法
13日前
KDDI株式会社
情報処理装置及び情報処理方法
13日前
KDDI株式会社
制御装置、方法及びプログラム
14日前
KDDI株式会社
情報処理装置及び情報処理方法
15日前
KDDI株式会社
基地局装置およびその通信方法
15日前
KDDI株式会社
情報処理装置及び情報処理方法
14日前
KDDI株式会社
情報処理装置及び情報処理方法
14日前
KDDI株式会社
情報処理装置及び情報処理方法
14日前
KDDI株式会社
情報処理装置及び情報処理方法
20日前
KDDI株式会社
情報処理装置及び情報処理方法
20日前
KDDI株式会社
情報処理装置及び情報処理方法
20日前
KDDI株式会社
情報処理装置、方法及びプログラム
13日前
KDDI株式会社
情報処理装置、学習装置及びプログラム
14日前
KDDI株式会社
基地局装置、端末装置及び無線通信方法
13日前
KDDI株式会社
通信装置、無線デバイス及びプログラム
24日前
KDDI株式会社
飛行体、情報処理装置及び情報処理方法
24日前
KDDI株式会社
ログ処理装置、端末、方法及びプログラム
8日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
15日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
16日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
16日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
プログラム、情報処理端末及び情報処理方法
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
14日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
24日前
KDDI株式会社
ネットワーク制御方法、システム及びプログラム
16日前
KDDI株式会社
通知装置、通知方法、通知システム及びプログラム
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ