TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024173115
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091284
出願日
2023-06-02
発明の名称
位置推定装置、位置推定方法及びプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G01C
21/28 20060101AFI20241205BHJP(測定;試験)
要約
【課題】 地表面に位置を特定するための情報が得られる対象が無くても、GNSSを使用できない場合であっても位置を推定できる位置推定装置等を提供する。
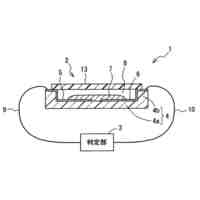
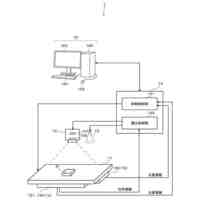
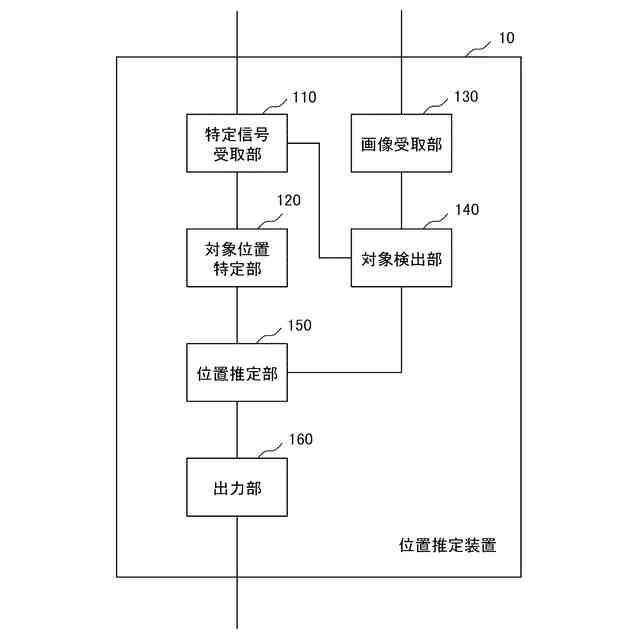
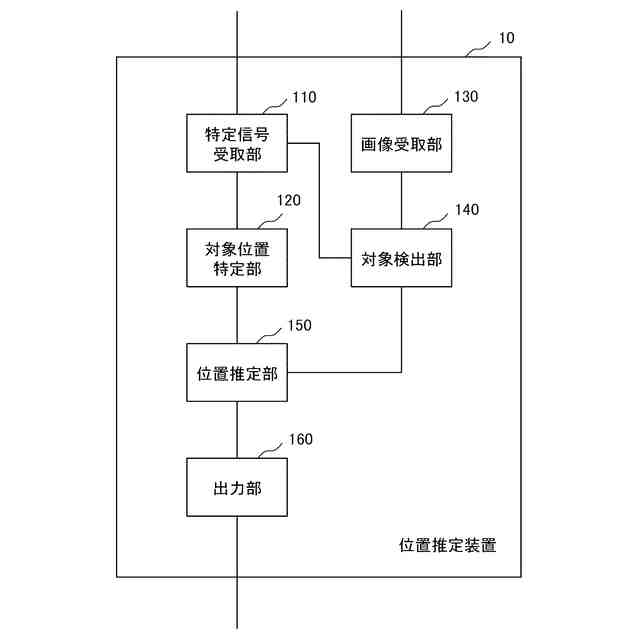
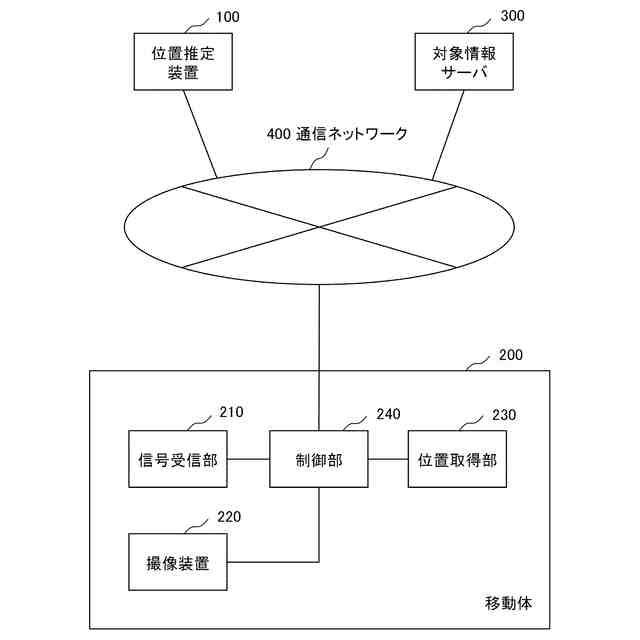
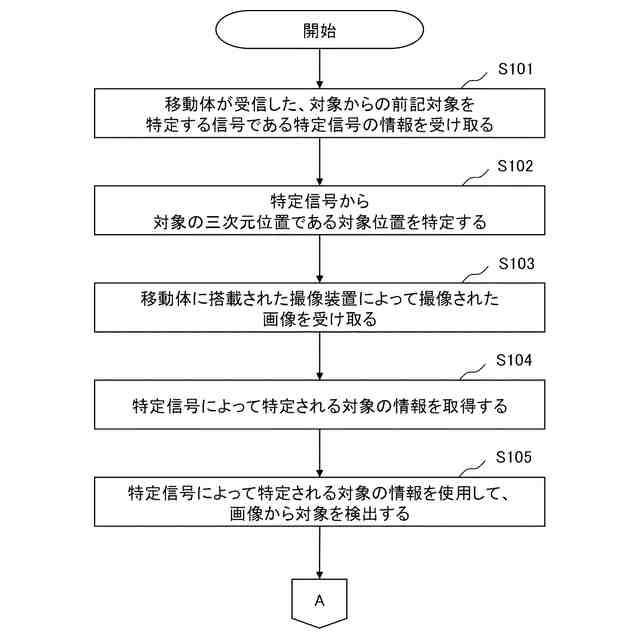
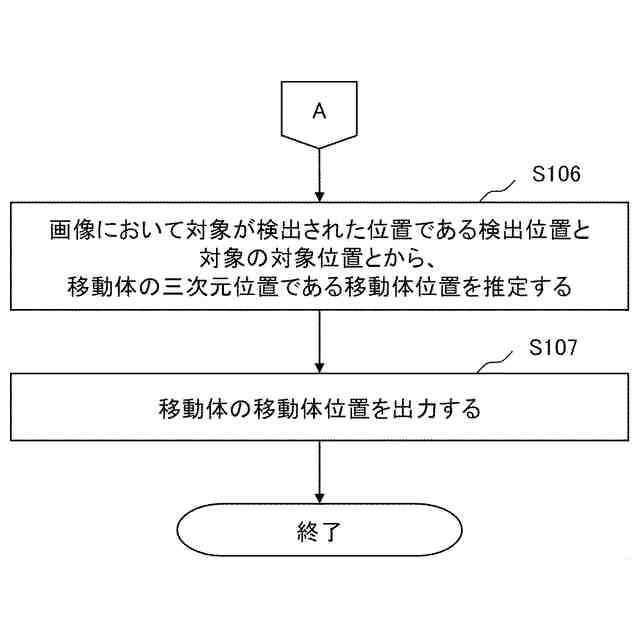
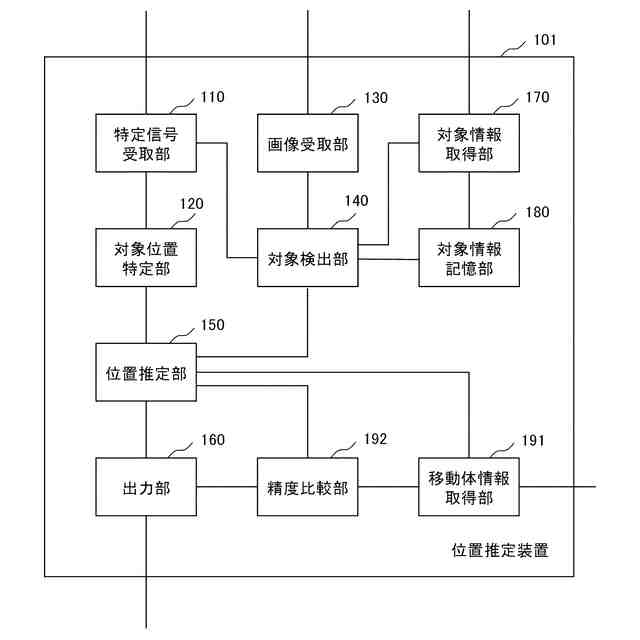
【解決手段】 本開示の一態様に係る位置推定装置は、移動体が受信した、対象からの前記対象を特定する信号である特定信号の情報を受け取る特定信号受取手段と、前記特定信号から前記対象の三次元位置である対象位置を特定する対象位置特定手段と、前記移動体に搭載された撮像装置によって撮像された画像を受け取る画像受取手段と、前記特定信号によって特定される前記対象の情報を使用して、前記画像から前記対象を検出する対象検出手段と、前記画像において前記対象が検出された位置である検出位置と前記対象の前記対象位置とから、前記移動体の三次元位置である移動体位置を推定する位置推定手段と、前記移動体の前記移動体位置を出力する出力手段と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
移動体が受信した、対象からの前記対象を特定する信号である特定信号の情報を受け取る特定信号受取手段と、
前記特定信号から前記対象の三次元位置である対象位置を特定する対象位置特定手段と、
前記移動体に搭載された撮像装置によって撮像された画像を受け取る画像受取手段と、
前記特定信号によって特定される前記対象の情報を使用して、前記画像から前記対象を検出する対象検出手段と、
前記画像において前記対象が検出された位置である検出位置と前記対象の前記対象位置とから、前記移動体の三次元位置である移動体位置を推定する位置推定手段と、
前記移動体の前記移動体位置を出力する出力手段と、
を備える位置推定装置。
続きを表示(約 1,600 文字)
【請求項2】
前記特定信号受取手段は、移動する前記対象からの前記特定信号の情報を受信する
請求項1に記載の位置推定装置。
【請求項3】
前記特定信号受取手段は、船舶である前記対象からの、船舶自動識別装置のための前記対象の位置情報を含む信号を、前記特定信号として受信し、
前記対象位置特定手段は、前記特定信号の情報から、前記対象の前記対象位置を抽出する
請求項2に記載の位置推定装置。
【請求項4】
前記対象検出手段は、前記特定信号から前記対象の識別情報を抽出し、当該特定信号によって特定される船舶の情報を使用して、前記画像から前記対象を検出する
請求項3に記載の位置推定装置。
【請求項5】
前記特定信号受取手段は、航空機である前記対象から、放送型自動従属監視の、前記対象の位置情報を含む信号を、前記特定信号として受信し、
前記対象位置特定手段は、前記特定信号の情報から、前記対象の前記対象位置を抽出する
請求項2に記載の位置推定装置。
【請求項6】
前記対象検出手段は、前記特定信号から前記対象の種類を抽出し、抽出された前記種類の航空機の情報を使用して、前記画像から前記対象を検出する
請求項5に記載の位置推定装置。
【請求項7】
前記特定信号受取手段は、他の移動体である前記対象から、前記他の移動体の位置を表す情報を含む信号を、前記特定信号として受信し、
前記対象位置特定手段は、前記特定信号の情報から、前記対象の前記対象位置を抽出する
請求項2に記載の位置推定装置。
【請求項8】
前記位置推定手段は、
前記対象から、前記特定信号に対する所定の概算用選択方法に従って概算用対象を選択し、
当該概算用対象の前記検出位置と前記概算用対象の前記対象位置とから、前記移動体の概算三次元位置を算出し、
当該概算三次元位置と前記対象の前記対象位置との間の相対位置に基づく所定の精算用選択方法に従って、前記対象から精算用対象を選択し、
当該精算用対象の前記検出位置と前記精算用対象の前記対象位置とから、前記移動体の前記移動体位置を算出する
請求項1又は2に記載の位置推定装置。
【請求項9】
移動体が受信した、対象からの前記対象を特定する信号である特定信号の情報を受け取り、
前記特定信号から前記対象の三次元位置である対象位置を特定し、
前記移動体に搭載された撮像装置によって撮像された画像を受け取る画像受取手段と、
前記特定信号によって特定される前記対象の情報を使用して、前記画像から前記対象を検出し、
前記画像において前記対象が検出された位置である検出位置と前記対象の前記対象位置とから、前記移動体の三次元位置である移動体位置を推定し、
前記移動体の前記移動体位置を出力する、
位置推定方法。
【請求項10】
移動体が受信した、対象からの前記対象を特定する信号である特定信号の情報を受け取る特定信号受取処理と、
前記特定信号から前記対象の三次元位置である対象位置を特定する対象位置特定処理と、
前記移動体に搭載された撮像装置によって撮像された画像を受け取る画像受取処理と、
前記特定信号によって特定される前記対象の情報を使用して、前記画像から前記対象を検出する対象検出処理と、
前記画像において前記対象が検出された位置である検出位置と前記対象の前記対象位置とから、前記移動体の三次元位置である移動体位置を推定する位置推定処理と、
前記移動体の前記移動体位置を出力する出力処理と、
をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置推定装置、位置推定方法及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ドローン等の飛翔体を含む移動体の位置の推定には、一般的に、GNSS(Global Navigation Satellite System)が使用される。しかし、GNSSを利用するための装置の故障又は異常等の発生によってGNSSを利用できない場合、位置を特定できなくなる。位置を特定できない場合、危険である。
【0003】
特許文献1には、GPS(Global Positioning System)を利用できない場合に、カメラで撮像した画像の海岸線の形状から、自機の位置を推定する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2019-035670号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の技術は、特徴的な海岸線を撮像できる範囲において、GPSを利用できなくても飛翔体の位置を推定することができる。しかし、特許文献1の技術では、特徴的な海岸線を撮像できる範囲以外では、位置を推定することはできない。言い換えると、特許文献1の技術では、地表面に位置を特定するための情報が得られる海岸線が存在しなければ、位置を推定することはできない。
【0006】
本開示の目的の1つは、地表面に位置を特定するための情報が得られる対象が無くても、GNSSを使用できない場合であっても位置を推定できる位置推定装置、位置推定方法及びプログラムを提供することである。
【課題を解決するための手段】
【0007】
本開示の一態様に係る位置推定装置は、移動体が受信した、対象からの前記対象を特定する信号である特定信号の情報を受け取る特定信号受取手段と、前記特定信号から前記対象の三次元位置である対象位置を特定する対象位置特定手段と、前記移動体に搭載された撮像装置によって撮像された画像を受け取る画像受取手段と、前記特定信号によって特定される前記対象の情報を使用して、前記画像から前記対象を検出する対象検出手段と、前記画像において前記対象が検出された位置である検出位置と前記対象の前記対象位置とから、前記移動体の三次元位置である移動体位置を推定する位置推定手段と、前記移動体の前記移動体位置を出力する出力手段と、を備える。
【0008】
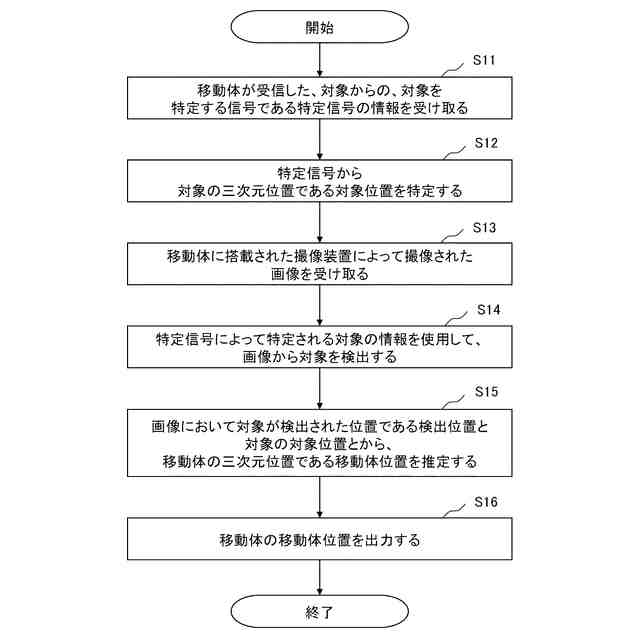
本開示の一態様に係る位置推定方法は、移動体が受信した、対象からの前記対象を特定する信号である特定信号の情報を受け取り、前記特定信号から前記対象の三次元位置である対象位置を特定し、前記移動体に搭載された撮像装置によって撮像された画像を受け取る画像受取手段と、前記特定信号によって特定される前記対象の情報を使用して、前記画像から前記対象を検出し、前記画像において前記対象が検出された位置である検出位置と前記対象の前記対象位置とから、前記移動体の三次元位置である移動体位置を推定し、前記移動体の前記移動体位置を出力する。
【0009】
本開示の一態様に係るプログラムは、移動体が受信した、対象からの前記対象を特定する信号である特定信号の情報を受け取る特定信号受取処理と、前記特定信号から前記対象の三次元位置である対象位置を特定する対象位置特定処理と、前記移動体に搭載された撮像装置によって撮像された画像を受け取る画像受取処理と、前記特定信号によって特定される前記対象の情報を使用して、前記画像から前記対象を検出する対象検出処理と、前記画像において前記対象が検出された位置である検出位置と前記対象の前記対象位置とから、前記移動体の三次元位置である移動体位置を推定する位置推定処理と、前記移動体の前記移動体位置を出力する出力処理と、をコンピュータに実行させる。
【発明の効果】
【0010】
本開示には、地表面に位置を特定するための情報が得られる対象が無くても、GNSSを使用できない場合であっても位置を推定できるという効果がある。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大真空
センサ
12日前
日本精機株式会社
基板及び表示装置
今日
学校法人同志社
測位システム
今日
日本碍子株式会社
ガスセンサ
5日前
株式会社ミツトヨ
エンコーダ
6日前
日本FC企画株式会社
特性試験装置
8日前
アズビル株式会社
圧力センサ
5日前
株式会社東芝
センサ
5日前
アズビル株式会社
検査用プローブ
13日前
エスペック株式会社
環境試験装置
5日前
古河電気工業株式会社
漏水検知構造
6日前
株式会社ノーリツ
温度センサ取付具
6日前
個人
レーザージャイロ応用重力場計測装置
7日前
積水ハウス株式会社
測定治具
5日前
株式会社ノーリツ
温度センサ取付具
6日前
日鉄テクノロジー株式会社
衝突試験装置
9日前
アズビル株式会社
距離設定形光電センサ
今日
一丸ファルコス株式会社
コラーゲンの検出方法
今日
トヨタ自動車株式会社
故障兆候の検出方法
今日
株式会社国際電気
試験装置
5日前
中国電力株式会社
位置推定システム
5日前
ヒロセ電機株式会社
磁気センサ装置
12日前
株式会社トプコン
撮像装置及び測量システム
5日前
矢崎総業株式会社
情報処理装置
今日
株式会社トプコン
撮像装置及び測量システム
5日前
株式会社日立ハイテクサイエンス
熱分析装置
13日前
マクセル株式会社
電気化学式酸素センサ
5日前
株式会社ミツトヨ
画像測定機およびプログラム
今日
日置電機株式会社
評価方法、及び評価装置
5日前
PHCホールディングス株式会社
センサ接続部材
5日前
TOTO株式会社
トイレ装置及びトイレシステム
今日
日本航空電子工業株式会社
気圧センサ
5日前
グランツールス株式会社
墨出し作業支援方法
5日前
住友電気工業株式会社
検知装置
5日前
トヨタ自動車株式会社
車両のビート音判定装置
5日前
東ソー株式会社
ナノ粒子とタンパク質の分離および分析方法
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ