TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024171668
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023088805
出願日
2023-05-30
発明の名称
移動体または移動体モデルの進行評価装置、および進行評価プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
40/09 20120101AFI20241205BHJP(車両一般)
要約
【課題】シミュレーションを繰り返し実行することなく、コンピュータ等により人間らしい操作を実行して移動体等を進行評価する。
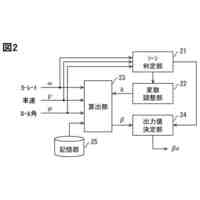
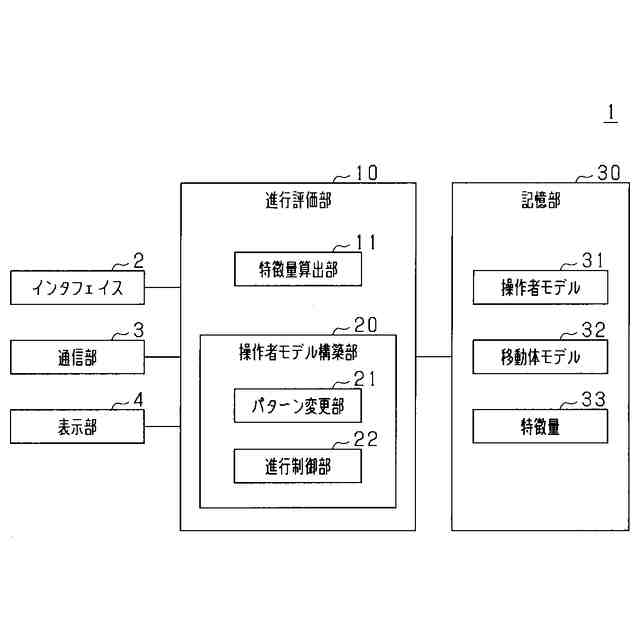
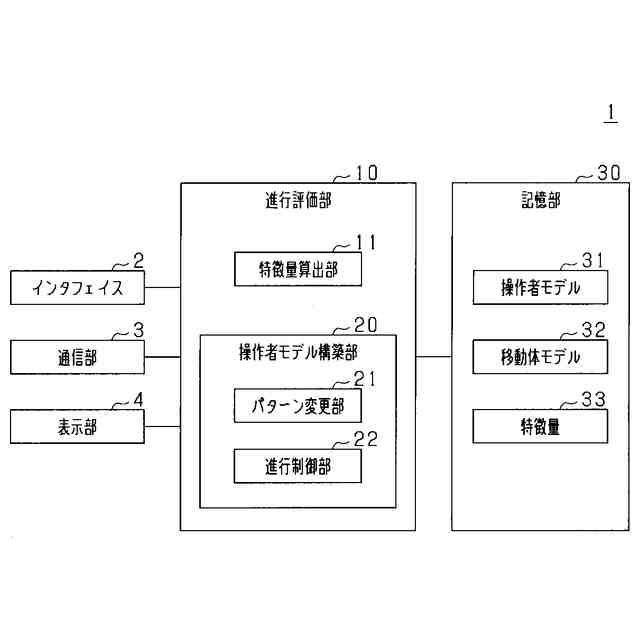
【解決手段】進行評価装置1は、評価用パターンに基づき所定の進行操作パラメータを変化させながら移動体または移動体をモデル化した移動体モデルを進行させて、その進行評価を実行し、進行操作パラメータの目標値の変化を示す目標パターンと、目標パターンに従って移動体を操作者が実際に操作した際の進行操作パラメータの実測値の変化を示す実操作パターンとの相違に基づいて、操作者の操作行動の特徴を示す特徴量を算出する特徴量算出部11と、算出した特徴量に基づいて評価用パターンを変更し、評価用パターンを操作者の操作行動の特徴を反映した特徴反映パターンに変更するパターン変更部21と、進行評価の実行に際し、特徴反映パターンに基づいて移動体または移動体モデルを進行させる進行制御部22と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
予め定められた評価用パターンに基づき所定の進行操作パラメータを変化させながら移動体または前記移動体をモデル化した移動体モデルを進行させて、その進行評価を実行する進行評価装置(1)であって、
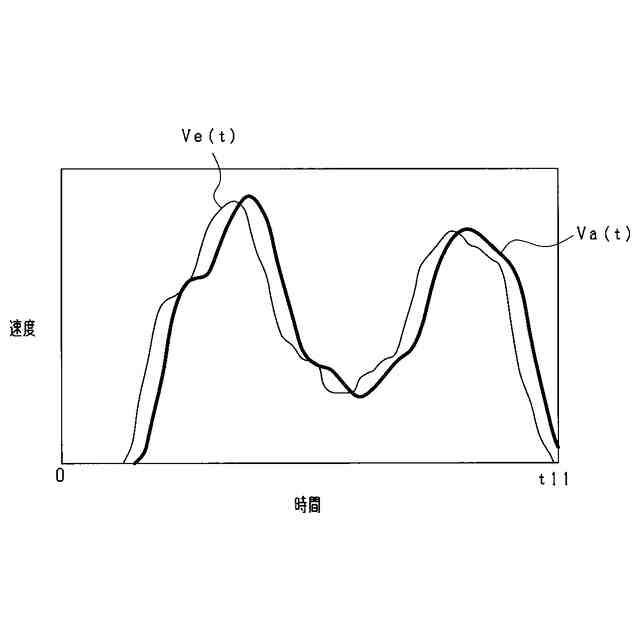
前記進行操作パラメータの目標値の変化を示す目標パターンと、前記目標パターンに従って前記移動体を操作者が実際に操作した際の前記進行操作パラメータの実測値の変化を示す実操作パターンとの相違に基づいて、前記操作者の操作行動の特徴を示す特徴量を算出する特徴量算出部(11)と、
前記特徴量算出部が算出した前記特徴量に基づいて、前記評価用パターンを変更し、前記評価用パターンを前記操作者の操作行動の特徴を反映した特徴反映パターンに変更するパターン変更部(21)と、
前記進行評価の実行に際し、前記特徴反映パターンに基づいて、前記移動体または前記移動体モデルを進行させる進行制御部(22)と、を備える進行評価装置。
続きを表示(約 1,000 文字)
【請求項2】
前記特徴量算出部は、
前記進行操作パラメータとして前記移動体の速度が設定されている前記目標パターンおよび前記実操作パターンに基づいて、前記特徴量を算出し、
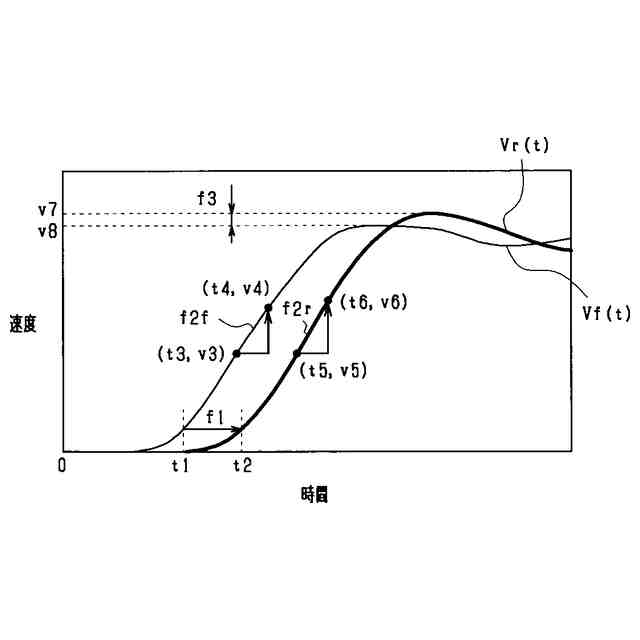
前記特徴量は、前記目標パターンに対する実パターンの遅れ時間、追従速度、速度ピークにおける行き過ぎ量、速度差、加減速度差、加減速度変化量の差、のうちの少なくともいずれか1つを含む請求項1に記載の進行評価装置。
【請求項3】
前記特徴量算出部は、前記移動体の速度を前記進行操作パラメータとして入力された前記目標パターンおよび前記実操作パターンに基づいて前記特徴量を算出する場合に、前記移動体が加速する時間域における加速時特徴量と、前記移動体が減速する時間域における減速時特徴量とを区別して算出する請求項1または2に記載の進行評価装置。
【請求項4】
前記特徴量は、1次元もしくは2次元の特徴量を少なくとも含み、3次元以上の特徴量をさらに含む請求項1または2に記載の進行評価装置。
【請求項5】
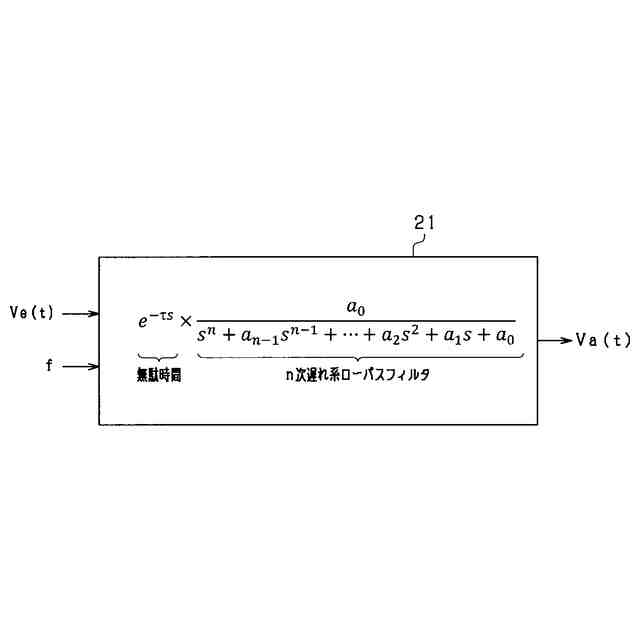
前記パターン変更部は、前記特徴量に基づいて設定した伝達関数を用いて前記評価用パターンを変更することにより、前記特徴反映パターンを算出する請求項1または2に記載の進行評価装置。
【請求項6】
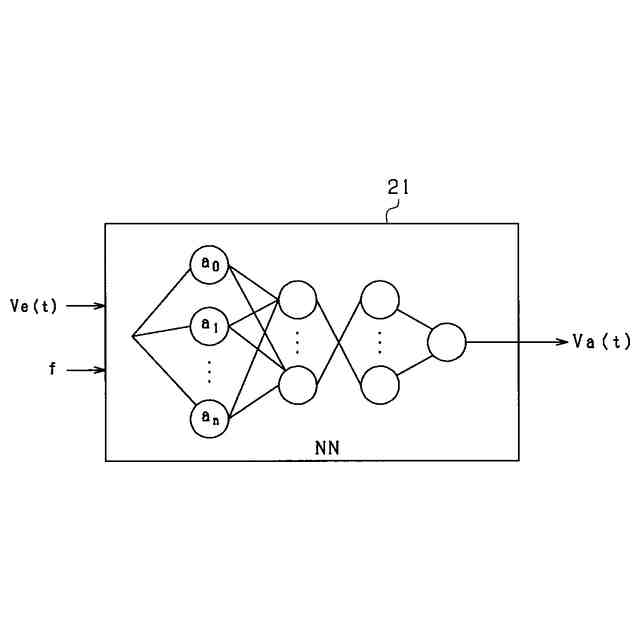
前記パターン変更部は、前記特徴量を学習用データとする機械学習により前記評価用パターンを変更することにより、前記特徴反映パターンを算出する請求項1または2に記載の進行評価装置。
【請求項7】
予め定められた評価用パターンに基づき所定の進行操作パラメータを変化させながら移動体または前記移動体をモデル化した移動体モデルを進行させて、その進行評価を実行する進行評価プログラムであって、コンピュータに、
前記進行操作パラメータの目標値の変化を示す目標パターンと、前記目標パターンに従って前記移動体を操作者が実際に操作した際の前記進行操作パラメータの実測値の変化を示す実操作パターンとの相違に基づいて、前記操作者の操作行動の特徴を示す特徴量を算出する特徴量算出ステップと、
前記特徴量算出ステップが算出した前記特徴量に基づいて、前記評価用パターンを変更し、前記評価用パターンを前記操作者の操作行動の特徴を反映した特徴反映パターンに変更するパターン変更ステップと、
前記進行評価の実行に際し、前記特徴反映パターンに基づいて、前記移動体または前記移動体モデルを進行させる進行制御ステップと、を実行させる、進行評価プログラム。
発明の詳細な説明
【技術分野】
【0001】
コンピュータ等によって移動体または移動体モデルを進行させて、その進行評価を実行する進行評価装置および進行評価プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
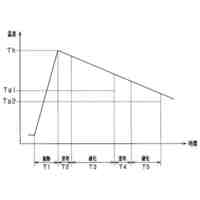
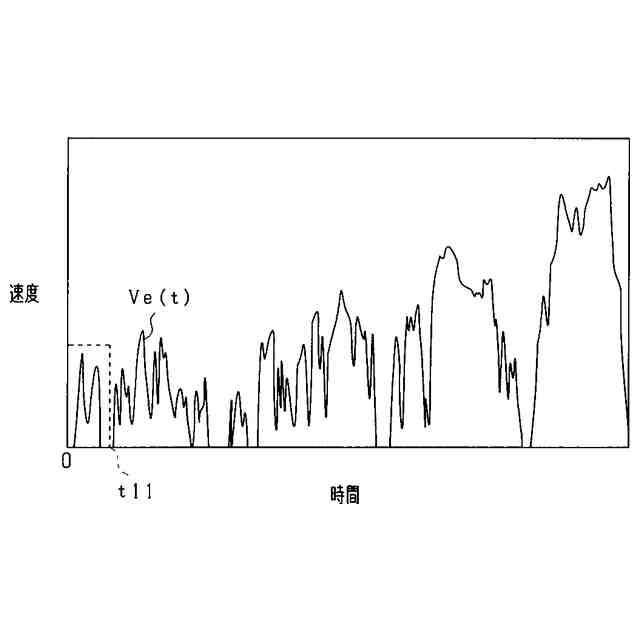
移動体の操作者をモデル化した操作者モデルを構築し、コンピュータ等によって操作者モデルを用いて移動体または移動体モデルを進行させて、その進行評価を実行する技術が知られている。例えば、自動車などの車両の製造、販売においては、国や地域により規定された特定の走行パターン(モード)により車両を走行させた際の燃費や排出ガスを測定し、これを表示する必要がある。走行モードは、例えば、走行開始から経過した時間と、その時に到達すべき車速との関係を示すグラフにより表わされる。この到達すべき車速は、目標車速と呼ばれることがある。
【0003】
移動体が車両であって操作者がドライバである場合、操作者モデルはドライバモデルと称される。上記のような、燃費に関する試験は、車両や車両モデルをドライバモデルにより走行させることにより行われる。ドライバモデルは、例えば、ドライバによるアクセルペダル及びブレーキペダルの操作を模擬し、車両や車両モデルの車速を制御する。
【0004】
燃費等に関する試験を適切に実行するためには、人間らしい操作を実行するドライバモデルを構築することが好ましい。例えば、アクセルペダルやブレーキペダルの操作が人間では行うことができないような急激なものになる等、ドライバモデルによる操作が人間らしい操作から乖離していると、車両の燃費性能を適切に評価することが困難となる。
【0005】
特許文献1には、強化学習によって、人間らしいペダル操作を行うドライバモデルを構築する走行シミュレーション装置が記載されている。具体的には、走行シミュレーション装置は、ドライバモデルのゲインの値を変更させながら、車両モデルを複数回走行させ、この時に変更されたゲインの値を報酬値に基づいて評価することによって、ドライバモデルのゲインの設定を自動的に行う。上記ゲインの値は、車速の追従性を評価する車速報酬関数のみならず、アクセルペダルの操作の滑らかさを評価するアクセル報酬関数、ブレーキペダルの操作の滑らかさを評価するブレーキ報酬関数によっても評価が行われる。
【先行技術文献】
【特許文献】
【0006】
特開2014-115168号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載の走行シミュレーション装置では、評価の高いゲイン値をドライバモデルのゲイン値として採用するために、ドライバモデルにおけるゲインの値を変化させながら車両モデルの走行シミュレーションを繰り返し実行する必要があり、処理負荷が大きいという課題があった。
【0008】
上記に鑑み、本発明は、シミュレーションを繰り返し実行することなく、コンピュータ等により人間らしい操作を実行して移動体等を進行評価する技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、予め定められた評価用パターンに基づき所定の進行操作パラメータを変化させながら前記移動体または前記移動体をモデル化した移動体モデルを進行させて、その進行評価を実行する進行評価装置を提供する。この進行評価装置は、前記進行操作パラメータの目標値の変化を示す目標パターンと、前記目標パターンに従って前記移動体を前記操作者が実際に操作した際の前記進行操作パラメータの実測値の変化を示す実操作パターンとの相違に基づいて、前記操作者の操作行動の特徴を示す特徴量を算出する特徴量算出部と、前記特徴量算出部が算出した前記特徴量に基づいて、前記評価用パターンを変更し、前記評価用パターンを前記操作者の操作行動の特徴を反映した特徴反映パターンに変更するパターン変更部と、前記進行評価の実行に際し、前記特徴反映パターンに基づいて、前記移動体または前記移動体モデルを進行させる進行制御部と、を備える。
【0010】
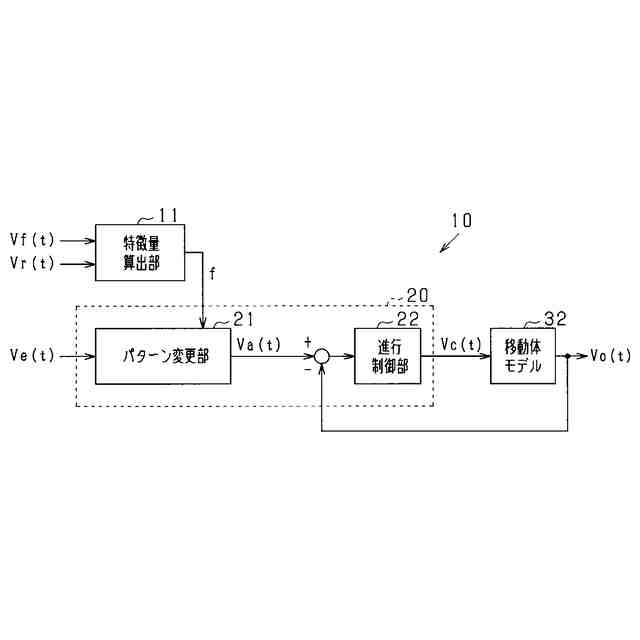
上記の進行評価装置によれば、特徴量算出部により、操作者の操作行動の特徴を反映した特徴量を算出する。特徴量は、進行操作パラメータの目標値の変化を示す目標パターンと、目標パターンに従って移動体を操作者が実際に操作した際の進行操作パラメータの実測値の変化を示す実操作パターンとの相違に基づいて算出する。そして、パターン変更部により、この特徴量に基づいて、評価用パターンを特徴反映パターンに変更する。特徴量に基づいて評価用パターンを変更することにより、操作者の操作行動の特徴を反映した特徴反映パターンを得ることができる。進行制御部は、特徴反映パターンに基づいて移動体または移動体モデルを進行させる。評価用パターンではなく、特徴反映パターンに基づいて(例えば、指令値として)、移動体または移動体モデルを進行制御することにより、移動体または移動体モデルを操作者が実際に操作したように進行させることができる。その結果、シミュレーションを繰り返し実行することなく、コンピュータ等により人間らしい操作を実行して、移動体または移動体モデルを進行評価できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
18日前
株式会社デンソー
生体電極
11日前
株式会社デンソー
整流回路
12日前
株式会社デンソー
半導体装置
13日前
株式会社デンソー
半導体装置
18日前
株式会社デンソー
電磁継電器
11日前
株式会社デンソー
レーダ装置
13日前
株式会社デンソー
血流促進装置
18日前
株式会社デンソー
コンデンサ装置
18日前
株式会社デンソー
車両用表示装置
11日前
株式会社デンソー
固定子の製造方法
11日前
株式会社デンソー
アンテナデバイス
11日前
株式会社デンソー
半導体モジュール
11日前
株式会社デンソー
燃料電池システム
12日前
株式会社デンソーウェーブ
情報読取システム
11日前
株式会社デンソー
車輪位置検出装置
18日前
株式会社デンソーテン
コネクタの取付構造
18日前
株式会社デンソー
静電モータ駆動回路
11日前
株式会社デンソー
横すべり角算出装置
11日前
株式会社デンソーウェーブ
携帯型の文字認識装置
11日前
株式会社デンソー
リアクタンス補償回路
12日前
株式会社デンソー
タイヤ空気圧監視システム
13日前
株式会社デンソー
監視装置、およびプログラム
13日前
株式会社デンソー
実装基板およびその製造方法
18日前
株式会社デンソー
NANDストレージデバイス
11日前
株式会社SOKEN
車載装置
13日前
株式会社デンソー
接触センサ、および、輻射ヒータ
18日前
株式会社デンソー
移動体の制御装置及びプログラム
18日前
株式会社デンソー
半導体モジュール、および、放熱板
13日前
株式会社デンソー
車両制御装置及び車両制御プログラム
11日前
株式会社SOKEN
車載センサ装置
13日前
株式会社デンソー
2種類の流体を噴射する流体噴射装置
11日前
株式会社SOKEN
制駆動力制御装置
13日前
株式会社デンソー
監視装置、監視方法、およびプログラム
11日前
株式会社デンソー
ソフトウェア提供装置及びソフトウェア更新装置
18日前
株式会社SOKEN
電力変換装置、プログラム
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ