TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024135912
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023046817
出願日
2023-03-23
発明の名称
通信制御サーバ、通信システム、通信制御方法、及びプログラム
出願人
株式会社リコー
代理人
個人
,
個人
,
個人
主分類
G05D
1/00 20240101AFI20240927BHJP(制御;調整)
要約
【課題】本開示は、所定のユーザに対して、現地の中で移動装置を素通りさせただけ又は移動させていない場所を把握し易いようにすることを目的とする。
【解決手段】本開示は、実空間で移動する移動装置を遠隔操作する通信端末との通信を制御する通信制御サーバであって、前記通信端末からの遠隔操作によって移動した一以上の前記移動装置の移動履歴を管理する移動履歴管理部と、前記移動履歴に基づいて決定された推奨場所を、所定の通信端末を用いて前記移動装置を遠隔操作する所定のユーザに対して推奨する推奨部と、を有する通信制御サーバである。
【選択図】図32
特許請求の範囲
【請求項1】
実空間で移動する移動装置を遠隔操作する通信端末との通信を制御する通信制御サーバであって、
前記通信端末からの遠隔操作によって移動した一以上の前記移動装置の移動履歴を管理する移動履歴管理部と、
前記移動履歴に基づいて決定された推奨場所を、所定の通信端末を用いて前記移動装置を遠隔操作する所定のユーザに対して推奨する推奨部と、
を有する通信制御サーバ。
続きを表示(約 1,600 文字)
【請求項2】
前記推奨部は、前記移動履歴に対し、所定条件を考慮して決定された前記推奨場所を、前記ユーザに対して推奨する、請求項1に記載の通信制御サーバ。
【請求項3】
前記所定条件は、前記所定の通信端末ではない一以上の他の通信端末からの遠隔操作によって一以上の前記移動装置が移動して滞在した際の滞在時間の合計が所定合計時間以上である場所である、請求項2に記載の通信制御サーバ。
【請求項4】
前記所定条件は、前記所定の通信端末ではない一以上の他の通信端末からの遠隔操作によって一以上の前記移動装置が移動して滞在した際の滞在時間が所定時間以上である場所であって、前記所定の通信端末を操作する所定のユーザが有する属性に関連する属性を有する他のユーザが操作する前記他の通信端末からの遠隔操作によって一以上の前記移動装置が移動した場所である、請求項2に記載の通信制御サーバ。
【請求項5】
前記所定条件は、前記所定の通信端末を操作する所定のユーザが有する属性に関連する属性を有する出展者の出展場所である、請求項2に記載の通信制御サーバ。
【請求項6】
請求項5に記載の通信制御サーバであって、
前記各出展者の通信端末が送信したメッセージを受信するメッセージ受信部を有し、
前記推奨部は、前記所定条件に対して、前記所定の通信端末を操作する所定のユーザが有する属性に関連する属性を有する出展者の通信端末からのメッセージを考慮する条件を含めて、前記推奨場所を決定する、
通信制御サーバ。
【請求項7】
請求項1に記載の通信制御サーバであって、
各ユーザが有する属性を管理するユーザ管理部と、
各出展者が有する属性を管理する出展者管理部と、
前記各出展者の通信端末が送信した各メッセージを受信するメッセージ受信部と、
前記各メッセージのうち、前記所定の通信端末を操作する所定のユーザが有する属性に関連する属性を有する所定の出展者の通信端末が送信した所定メッセージを、前記所定の通信端末に送信するメッセージ送信部と、
を有する通信制御サーバ。
【請求項8】
請求項1に記載の通信制御サーバであって、
各ユーザが有する属性を管理するユーザ管理部と、
各出展者が有する属性を管理する出展者管理部と、
各出展者が開催するイベントの開催時間帯を管理するイベント管理部と、
前記所定の通信端末を操作する所定のユーザが有する属性に関連する属性を有する出展者が所定のイベントを開催する旨のメッセージを、前記所定の通信端末に送信するメッセージ送信部と、
を有する通信制御サーバ。
【請求項9】
前記イベント管理部は、イベント毎にイベントの内容を示す内容情報を管理し、
前記メッセージ送信部は、前記内容情報を含んだ前記メッセージを送信する、
請求項8に記載の通信制御サーバ。
【請求項10】
請求項1に記載の通信制御サーバであって、
各ユーザが有する属性を管理するユーザ管理部と、
各出展者が有する属性及び前記各出展者の出展場所を管理する出展者管理部と、
前記各出展者の通信端末又は出店場所に設置された人感センサが送信した、混雑状況を示す各状況情報を受信する状況受信部と、
前記各状況情報のうち、前記所定の通信端末を操作する所定のユーザが有する属性に関連する属性を有する所定の出展者の通信端末又は出展場所に設置された人感センサが送信した所定の状況情報を、前記所定の通信端末に送信する状況送信部と、
を有する通信制御サーバ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示内容は、通信制御サーバ、通信システム、通信制御方法、及びプログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
実空間の展示場などにおいて、出展者がテレプレゼンスロボット(以下「ロボット」と示す)と共に展示場を見学するツアーが登場している。展示場の遠隔見学を希望するユーザは、自分が見学したい展示内容に関して、PC(Personal Computer)等によりロボットに搭載されたカメラからの映像を見たり、ロボットに搭載されたマイクからの出展者の音声を聞いたりすることにより、遠隔地からでもリアルに近い臨場感で見学をすることができることが既に知られている。
【0003】
また、様々な展示場に対応するため、所定の通信端末を用いてユーザがロボットを遠隔操作することが提案されている(特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来は、遠隔操作をしながら、実空間の移動装置を移動する場所を特定することは必ずしも容易ではなかった。
【0005】
本開示は、上述の課題を鑑みてなされたもので、遠隔操作をしながら実空間の移動装置を移動させる場所を特定する支援を行うことを目的とする。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、本開示は、実空間で移動する移動装置を遠隔操作する通信端末との通信を制御する通信制御サーバであって、前記通信端末からの遠隔操作によって移動した一以上の前記移動装置の移動履歴を管理する移動履歴管理部と、前記移動履歴に基づいて決定された推奨場所を、所定の通信端末を用いて前記移動装置を遠隔操作する所定のユーザに対して推奨する推奨部と、を有する通信制御サーバである。
【発明の効果】
【0007】
本開示によれば、遠隔操作をしながら実空間の移動装置を移動させる場所を特定する支援を行うことができるという効果を奏する。
【図面の簡単な説明】
【0008】
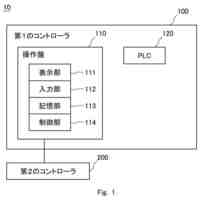
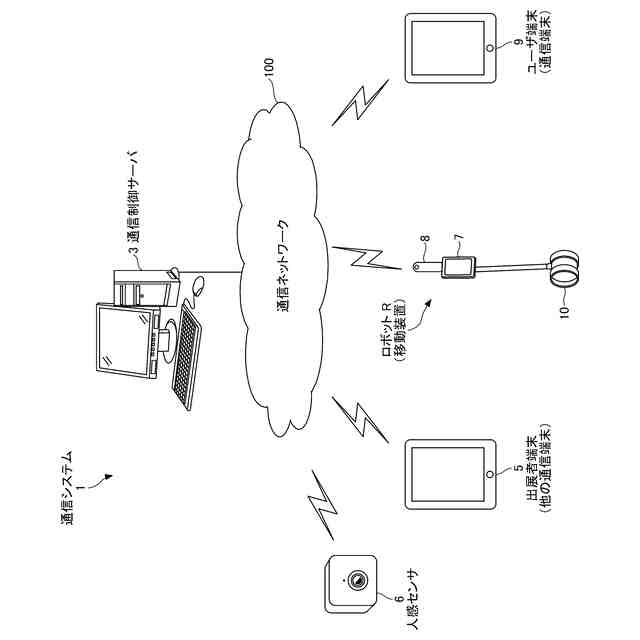
通信システムの全体構成図である。
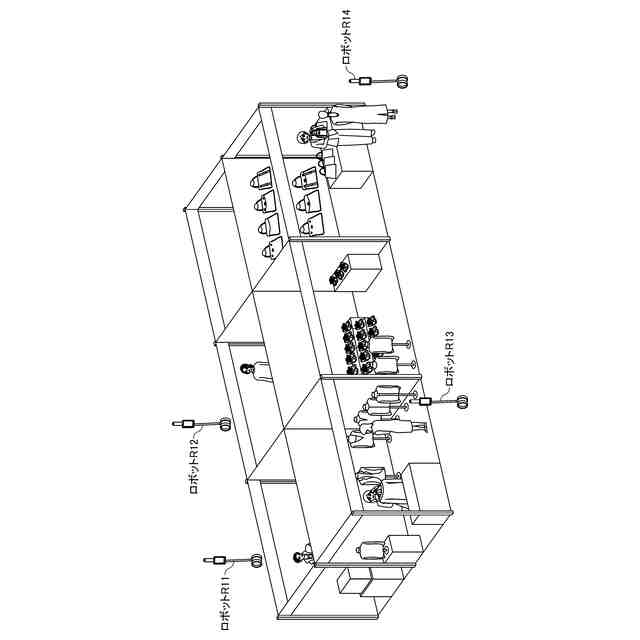
実空間における展示場の状況を示した図である。
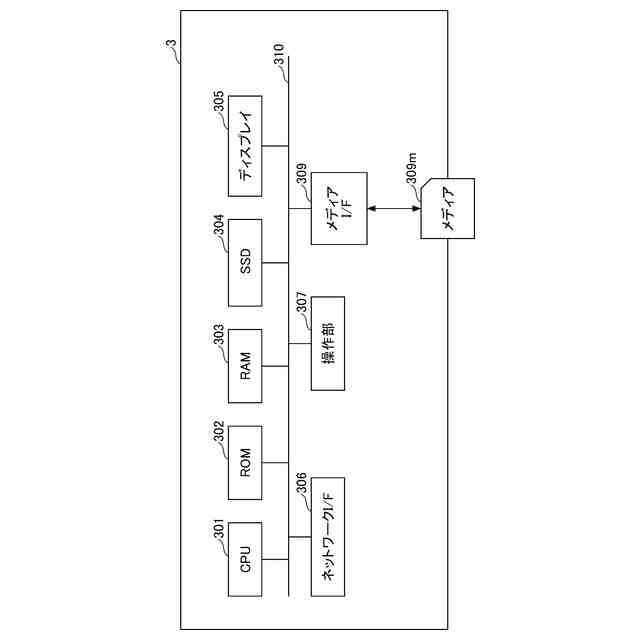
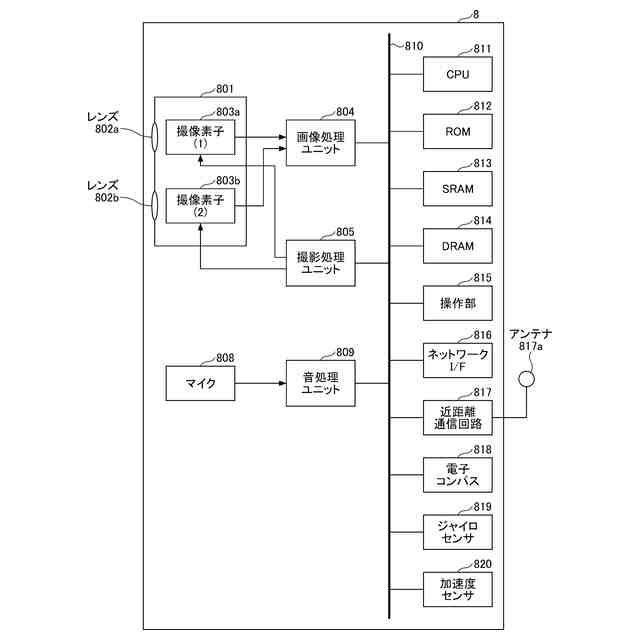
通信制御サーバのハードウェア構成図である。
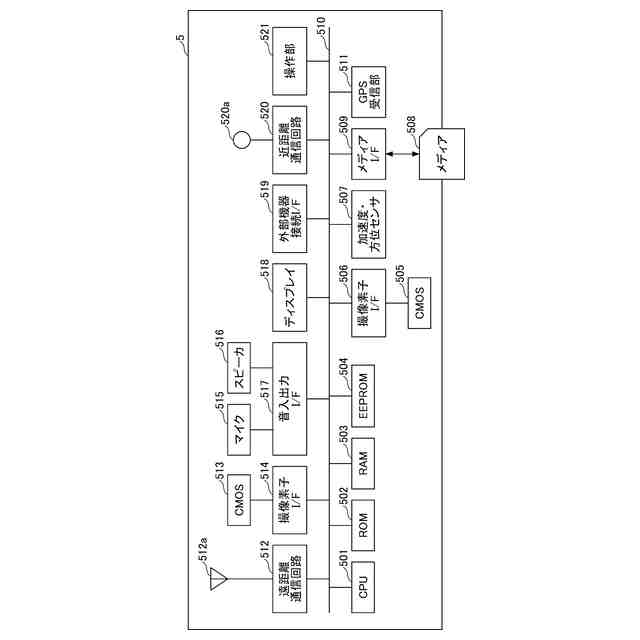
出展者端末、ロボット端末、及びユーザ端末のハードウェア構成図である。
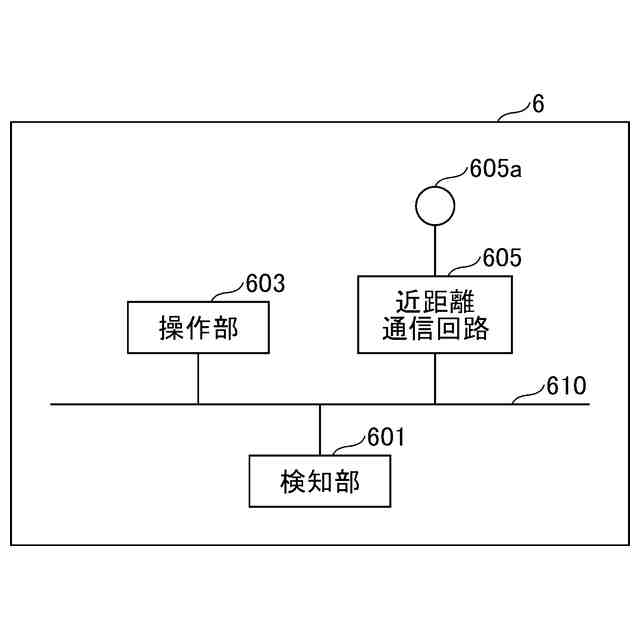
人感センサのハードウェア構成図である。
広角撮影装置のハードウェア構成図である。
広角撮影装置の使用イメージ図の一例である。
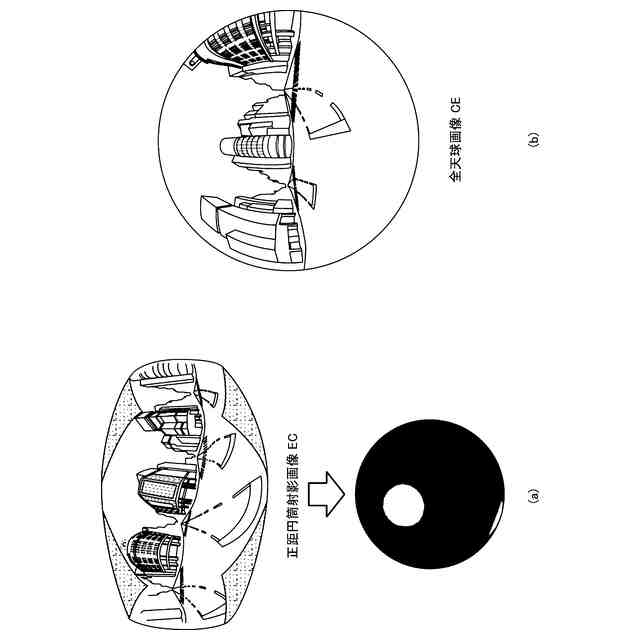
(a)は広角撮影装置8で撮像された半球画像(前側)、(b)は広角撮影装置8で撮像された半球画像(後側)、(c)は正距円筒図法により表された画像(以下、「正距円筒射影画像」という)を示した図である。
(a)は正距円筒射影画像で球を被う状態を示した概念図、(b)は全天球画像を示した図である。
全天球画像を三次元の立体球とした場合の仮想カメラ及び所定領域の位置を示した図である。
(a)は図10の立体斜視図、(b)は(a)の状態の所定領域画像がディスプレイに表示されている図、(c)は(a)における仮想カメラICの視点を変更後の所定領域を示した図、(d)は(c)の状態の所定領域画像がディスプレイに表示されている図である。
所定領域情報と所定領域の画像の関係との関係を示した図の一例である。
車両装置のハードウェア構成図である。
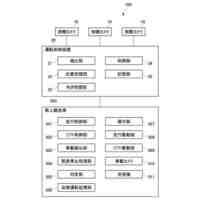
通信システムの各機能構成図である。
ユーザ管理テーブルの概念図である。
出展者管理テーブルの概念図である。
ロボット認証テーブルの概念図である。
ロボット予約管理テーブルの概念図である。
ロボット性能・状態管理テーブルの概念図である。
ロボット移動管理テーブルの概念図である。
ゾーン位置管理テーブルの概念図である。
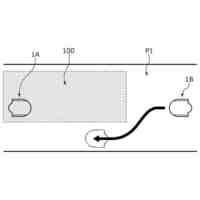
各ゾーンと各出展者のブース及び充電ステーションとの位置関係を示す図である。
在時間管理テーブルの概念図である。
イベント管理テーブルの概念図である。
ロボットの予約、ブースの状況等の管理、実空間上のロボットの位置の管理等を示すシーケンス図である。
ユーザ端末で表示されるロボット予約画面を示す図である。
ユーザ端末からロボットの遠隔操作を開始するための処理を示したシーケンス図である。
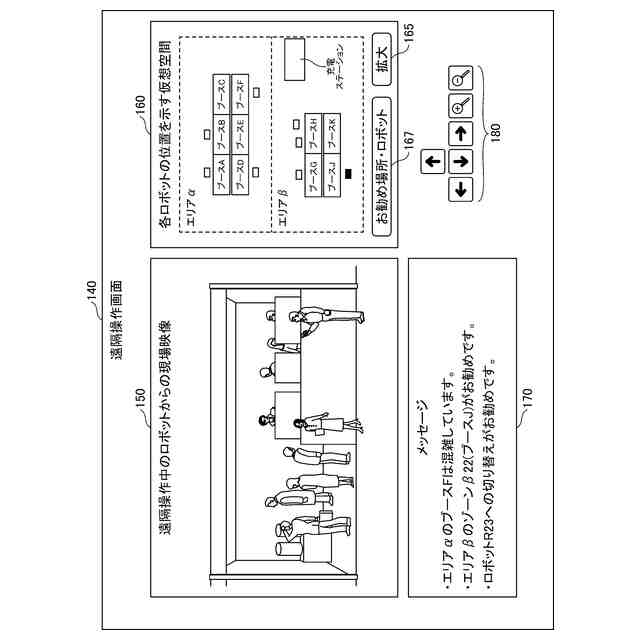
ユーザ端末で表示される遠隔操作画面を示す図である。
初期状態の各ロボットの位置を示す仮想空間画面の拡大図である。
遠隔操作対象のロボットを切り替える処理を示すシーケンス図である。
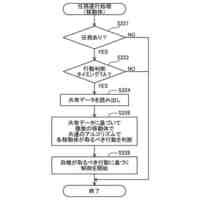
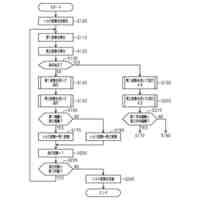
推奨対象抽出処理(その1)を示すフローチャートである
ユーザ端末で表示される遠隔操作画面を示す図である。
遠隔操作対象のロボットを切り替えた後の各ロボットの位置を示す仮想空間画面の拡大図である。
推奨対象抽出処理(その2)を示すフローチャートである。
推奨対象抽出処理(その3)を示すフローチャートである。
【発明を実施するための形態】
【0009】
〔通信システムの概略〕
図1を用いて通信システム1の概略を説明する。図1は、テレプレゼンスロボット(以降「ロボット」と示す)Rを用いた通信システムの全体構成図である。
【0010】
通信システム1は、通信制御サーバ3、出展者端末5、人感センサ6、ユーザ端末9、及びロボットRによって構築されている。図1では、図面の制約上、出展者端末5、人感センサ6、ユーザ端末9、及びロボットRは、それぞれ1つずつ示されているが、実際の運用ではそれぞれ複数存在する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
自動走行体
17日前
株式会社豊田自動織機
無人走行体
6日前
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電流回路
2か月前
オムロン株式会社
自律作業システム
6日前
トヨタ自動車株式会社
制御システム
1か月前
エイブリック株式会社
シャントレギュレータ
2日前
株式会社ダイフク
搬送設備
1か月前
オムロン株式会社
設計装置および設計方法
6日前
東芝ライテック株式会社
管理システム
2日前
株式会社デンソー
電子制御装置
16日前
株式会社フカデン
外周部加工システム
27日前
株式会社ダイフク
物品搬送設備
6日前
株式会社デンソー
移動体制御装置
24日前
大阪瓦斯株式会社
二次圧制御機構
1か月前
ミツミ電機株式会社
半導体集積回路装置
1か月前
日立建機株式会社
自律走行システム
1か月前
アズビル株式会社
診断システムおよび診断方法
2日前
大阪瓦斯株式会社
二次圧制御機構
1か月前
株式会社デンソー
車両用電子制御装置
2か月前
株式会社ダイフク
搬送設備の検査装置
1か月前
エンゼルグループ株式会社
無人搬送システム
2か月前
ローム株式会社
リニア電源回路
2日前
株式会社藤千商会
移動体制御システムおよび移動体
5日前
トヨタ自動車株式会社
ソーラー充電システム
2日前
ルネサスエレクトロニクス株式会社
レギュレータ回路
6日前
株式会社オカムラ
自律移動ロボット
1か月前
トヨタ自動車株式会社
適合システム及び適合方法
1か月前
川崎重工業株式会社
電気操作装置
2日前
株式会社ニッキ
レギュレータ
2日前
株式会社ニッキ
レギュレータ
2日前
川崎重工業株式会社
電気操作装置
2日前
川崎重工業株式会社
電気操作装置
2日前
株式会社FUJI
工作機械
2日前
三菱電機株式会社
運転支援システムおよび運転支援方法
24日前
川崎重工業株式会社
操作レバー装置、及びその組立方法
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ