TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024134077
公報種別
公開特許公報(A)
公開日
2024-10-03
出願番号
2023044183
出願日
2023-03-20
発明の名称
モータユニット
出願人
ニデックプレシジョン株式会社
代理人
弁理士法人筒井国際特許事務所
主分類
H02K
5/26 20060101AFI20240926BHJP(電力の発電,変換,配電)
要約
【課題】モータの姿勢を変更可能なモータユニットにおいて、大型化を抑制したモータユニットを提供する。
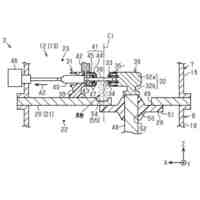
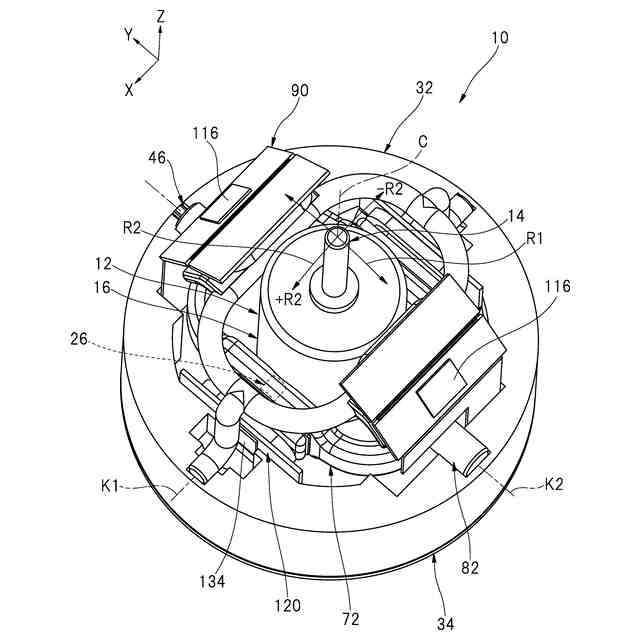
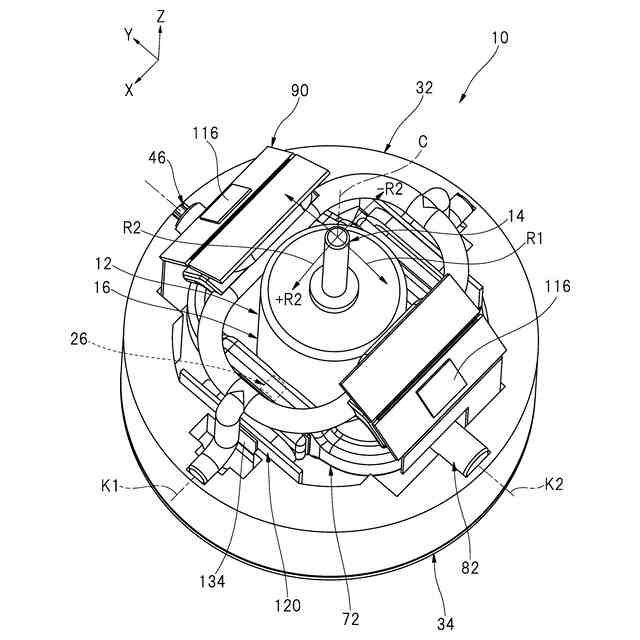
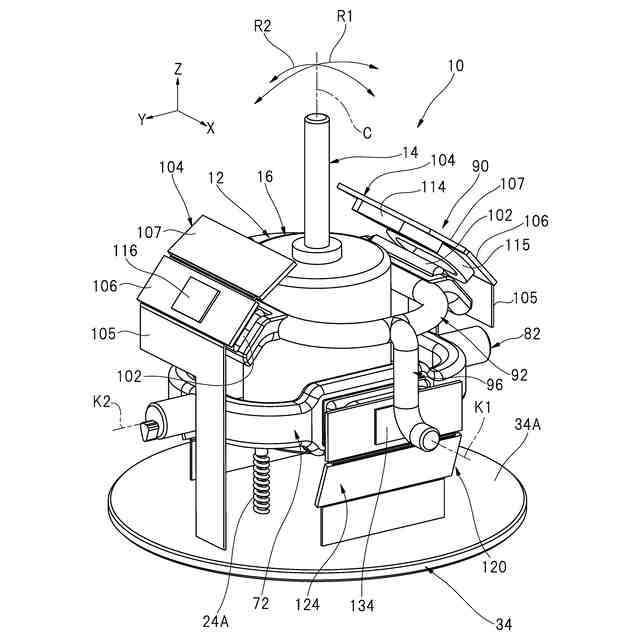
【解決手段】モータユニット10は、モータ12と、第1軸部26と、ホルダ72と、第1駆動部90と、第2軸部82と、ケース部32と、第2駆動部120と、を有する。モータは、モータシャフト14とモータ本体16とを含む。第1軸部は、モータ本体からモータシャフトの軸方向と交差する第1交差方向に延びる。ホルダは、モータ本体が第1軸部の周りの第1回転方向R1に回転するように、第1軸部を回転可能に支持する。第1駆動部は、モータ本体を第1回転方向R1に駆動する。第2軸部は、ホルダに設けられ、軸方向及び第1交差方向の両方と交差する第2交差方向に延びる。ケース部は、モータ本体が第2軸部の周りの第2回転方向R2に回転するように、第2軸部を回転可能に支持する。第2駆動部は、モータ本体を第2回転方向R2に駆動する。
【選択図】図2
特許請求の範囲
【請求項1】
軸体と前記軸体を回転駆動するモータ本体とを含むモータと、
前記モータ本体から前記軸体の軸方向と交差する第1交差方向に延びる第1軸部と、
前記モータ本体が前記第1軸部の周りの第1回転方向に回転するように、前記第1軸部を回転可能に支持するホルダと、
前記モータ本体を前記第1回転方向に駆動する第1駆動部と、
前記ホルダに設けられ、前記軸方向及び前記第1交差方向の両方と交差する第2交差方向に延びる第2軸部と、
前記モータ本体が前記第2軸部の周りの第2回転方向に回転するように、前記第2軸部を回転可能に支持するハウジングと、
前記モータ本体を前記第2回転方向に駆動する第2駆動部と、
を有する、モータユニット。
続きを表示(約 1,100 文字)
【請求項2】
前記ホルダは、前記軸方向に開口する筒形状に設けられている、
請求項1に記載のモータユニット。
【請求項3】
前記ホルダの前記第2交差方向の寸法は、前記ホルダの前記第1交差方向の寸法よりも長い、
請求項2に記載のモータユニット。
【請求項4】
前記第1駆動部は、
前記軸方向から見て前記モータ本体を囲み、前記モータ本体と接触可能なフレームと、
前記フレームに設けられ且つ前記ハウジングに支持され、前記第1回転方向に回転可能なアームと、
前記フレームの前記第2交差方向の一端部と他端部とに設けられた一対の第1マグネットと、
前記第1マグネットと対向可能に前記ハウジングに設けられ、通電された場合に前記第1マグネットとの協働によって前記フレームに前記第1回転方向の回転力を付与する複数の第1コイルと、
を有する、
請求項1に記載のモータユニット。
【請求項5】
前記複数の第1コイルは、前記第1回転方向に沿って並んでおり、
前記第1マグネットの位置を検知する第1検知部が、前記複数の第1コイルのうち少なくとも1つに設けられている、
請求項4に記載のモータユニット。
【請求項6】
前記第1検知部は、前記第1コイルの内側に設けられている、
請求項5に記載のモータユニット。
【請求項7】
前記第1コイルを基準として前記第1マグネットが位置する側とは反対側には、前記第1マグネットを前記アームの回転前の位置に保持可能な第1磁性部材が設けられている、
請求項6に記載のモータユニット。
【請求項8】
前記第2駆動部は、
前記ホルダの前記第1交差方向の一端部と他端部とに設けられた一対の第2マグネットと、
前記第2マグネットと対向可能に前記ハウジングに設けられ、通電された場合に前記第2マグネットとの協働によって前記ホルダに前記第2回転方向の回転力を付与する複数の第2コイルと、を有する、
請求項1から請求項7のいずれか1項に記載のモータユニット。
【請求項9】
前記複数の第2コイルは、前記第2回転方向に沿って並んでおり、
前記第2マグネットの位置を検知する第2検知部が、前記複数の第2コイルのうち少なくとも1つに設けられている、
請求項8に記載のモータユニット。
【請求項10】
前記第2検知部は、前記第2コイルの内側に設けられている、
請求項9に記載のモータユニット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータユニットに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1に示された送風機は、ファンモータ、ファンモータ固定部、駆動歯車、受動歯車及び起伏モータを含んでいる。ファンモータは、ファンモータ固定部に固定されている。起伏モータは、駆動歯車及び受動歯車を介して、ファンモータ固定部を回動させている。
【先行技術文献】
【特許文献】
【0003】
特開2019-152135号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のように、モータが取り付けられた取付部材を駆動部が回転させることで、モータの姿勢を変更するユニットでは、当該取付部材を回転させるためのスペースを余分に確保しておく必要がある。このため、ユニットが大型化する虞がある。
【0005】
本発明の目的は、モータの姿勢を変更可能なモータユニットについて、当該モータユニットの大型化を抑制することである。
【課題を解決するための手段】
【0006】
一実施形態のモータユニットは、モータと、第1軸部と、ホルダと、第1駆動部と、第2軸部と、ハウジングと、第2駆動部と、を有する。モータは、軸体と前記軸体を回転駆動するモータ本体とを含む。第1軸部は、前記モータ本体から前記軸体の軸方向と交差する第1交差方向に延びる。ホルダは、前記モータ本体が前記第1軸部の周りの第1回転方向に回転するように、前記第1軸部を回転可能に支持する。第1駆動部は、前記モータ本体を前記第1回転方向に駆動する。第2軸部は、前記ホルダに設けられ、前記軸方向及び前記第1交差方向の両方と交差する第2交差方向に延びる。ハウジングは、前記モータ本体が前記第2軸部の周りの第2回転方向に回転するように、前記第2軸部を回転可能に支持する。第2駆動部は、前記モータ本体を前記第2回転方向に駆動する。
【0007】
一実施形態のモータユニットは、モータと、軸部と、ハウジングと、駆動部と、を有する。モータは、軸体と前記軸体を回転駆動するモータ本体とを含む。軸部は、前記モータ本体から前記軸体の軸方向と交差する交差方向に延びる。ハウジングは、前記モータ本体が前記軸部の周りの回転方向に回転するように、前記軸部を回転可能に支持する。駆動部は、前記モータ本体を前記回転方向に駆動する。
【発明の効果】
【0008】
本発明によれば、モータの姿勢を変更可能なモータユニットについて、当該モータユニットの大型化を抑制することができる。
【図面の簡単な説明】
【0009】
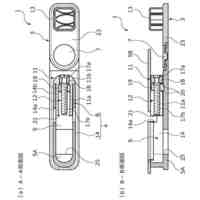
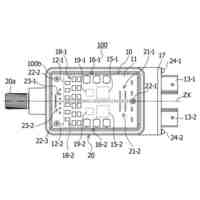
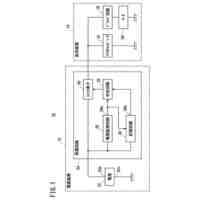
図1は、第1実施形態に係るモータユニットの外観を示す斜視図である。
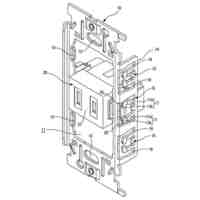
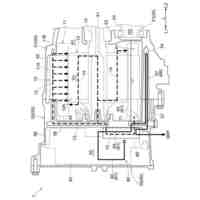
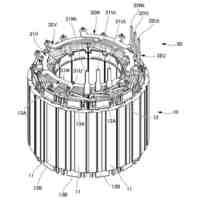
図2は、図1に示されるモータユニットの上ケースを取り除いた状態を示す斜視図である。
図3は、図1に示されるモータユニットの上ケース及び下ケースを取り除いた状態を示す斜視図である。
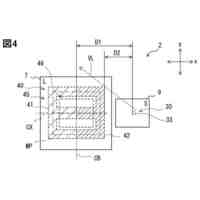
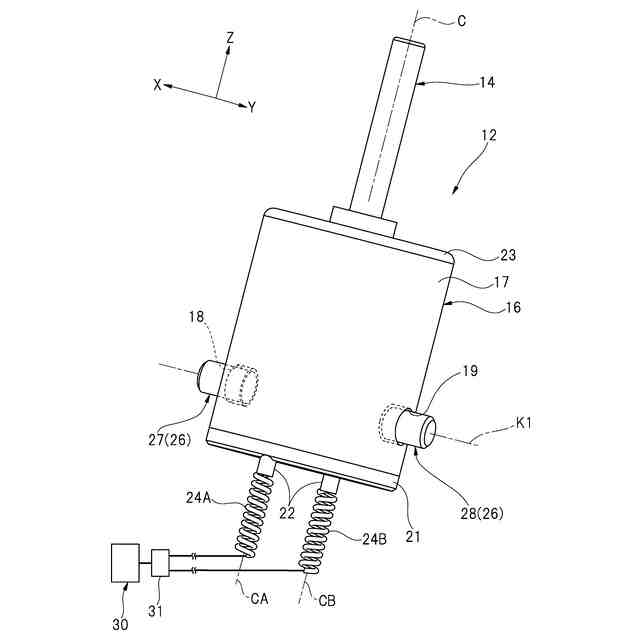
図4は、図1に示されるモータユニットのモータ、第1軸部及びハーネスを示す斜視図である。
図5は、図1に示されるモータユニットの下ケースを示す斜視図である。
図6は、図1に示されるモータユニットの上ケースを下側から見た斜視図である。
図7は、図1に示されるモータユニットのモータ及びホルダを示す斜視図である。
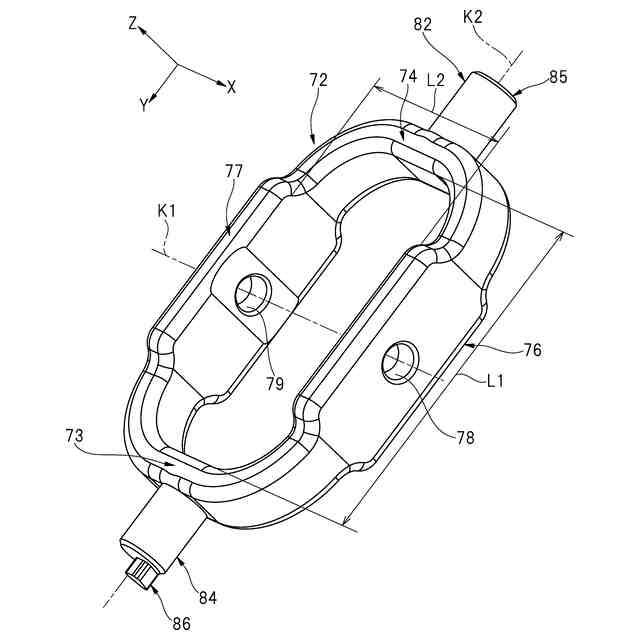
図8は、図1に示されるモータユニットのホルダを示す斜視図である。
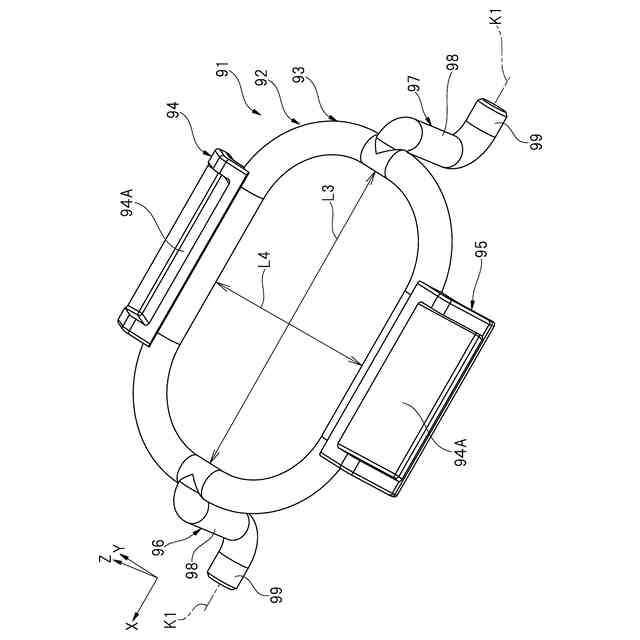
図9は、図1に示されるモータユニットの可動フレームを示す斜視図である。
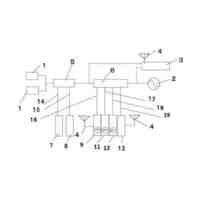
図10は、モータ、ホルダ及び可動フレーム等の配置関係を示す斜視図である。
図11は、ケース部の規制部とホルダの突起部との配置関係を模式的に示す説明図である。
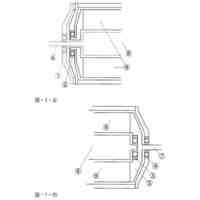
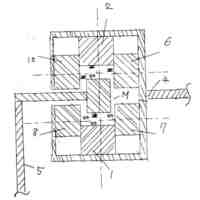
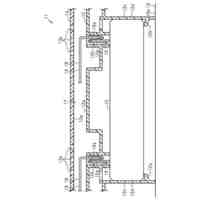
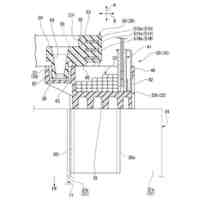
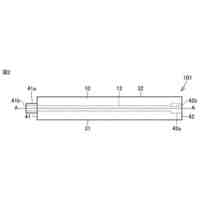
図12は、図1に示されるモータユニットの断面図(図1のA-A線断面図)である。
図13は、図1に示されるモータユニットの断面図(図1のB-B線断面図)である。
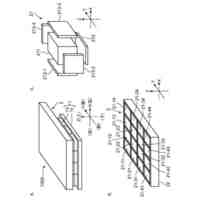
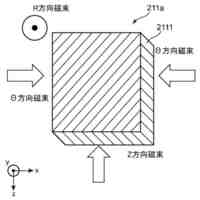
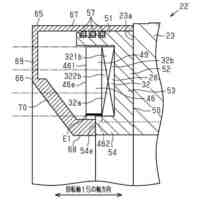
図14Aは、モータが基準位置にある場合の第1マグネットと第1コイルの配置状態を模式的に示した説明図である。
図14Bは、モータが第1回転方向の一方側に回転された場合の第1マグネットと第1コイルの配置状態を模式的に示した説明図である。
図14Cは、モータが第1回転方向の他方側に回転された場合の第1マグネットと第1コイルの配置状態を模式的に示した説明図である。
図15は、モータが第1回転方向の一方側に回転された場合の各部材の配置状態を示す斜視図である。
図16Aは、モータが基準位置にある場合の第2マグネットと第2コイルの配置状態を模式的に示した説明図である。
図16Bは、モータが第2回転方向の一方側に回転された場合の第2マグネットと第2コイルの磁石とコイルの配置状態を模式的に示した説明図である。
図16Cは、モータが第2回転方向の他方側に回転された場合の第2マグネットと第2コイルの配置状態を模式的に示した説明図である。
図17は、モータが第2回転方向の一方側に回転された場合の各部材の配置状態を示す斜視図である。
図18は、モータが第1回転方向の他方側且つ第2回転方向の一方側に回転された場合の各部材の配置状態を示す斜視図である。
図19は、第2実施形態に係るモータユニットの断面図である。
【発明を実施するための形態】
【0010】
以下、本発明の第1、第2実施形態について図面を参照しながら詳細に説明する。なお、第1、第2実施形態を説明するために参照する全ての図面において、同一又は実質的に同一の構成や要素には同一の符号を用いる。また、一度説明した構成や要素については、原則として繰り返しの説明は行わない。以下の説明では、特に言及がない場合、「第1」、「第2」などの用語は、構成要素を互いに区別するために使用されているだけであり、特定の順位や順番を表すものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
モータ
18日前
個人
総反回転復動発電器
7日前
個人
回転装置のハルバッハ磁石配列
5日前
株式会社神戸製鋼所
電動機
4日前
株式会社神戸製鋼所
電動機
19日前
神保電器株式会社
配線器具取付枠
18日前
個人
路面走行車両を利用した発電システム
19日前
住友電装株式会社
電気接続箱
18日前
個人
太陽光発電電力活用プラットフォーム
18日前
矢崎総業株式会社
蓄電システム
19日前
株式会社ダイヘン
電力システム
4日前
富士電機株式会社
電力変換装置
18日前
株式会社ダイヘン
電力システム
18日前
株式会社ミツバ
電動モータ
11日前
東芝ライテック株式会社
電源装置
22日前
株式会社豊田自動織機
電動圧縮機
4日前
システムカワバタ有限会社
コード収納装置
12日前
株式会社ダイヘン
無効電力補償装置
4日前
TDK株式会社
電力変換装置
4日前
日新電機株式会社
ガス絶縁開閉装置
22日前
株式会社エフ・シー・シー
太陽光発電装置
25日前
株式会社エフ・シー・シー
太陽光発電装置
25日前
大阪瓦斯株式会社
電力調達装置
18日前
株式会社デンソー
電力変換装置
18日前
株式会社デンソー
電力制御装置
5日前
株式会社アイシン
車両用駆動装置
4日前
日立Astemo株式会社
電子制御装置
4日前
富士電機機器制御株式会社
過負荷保護装置
18日前
株式会社TMEIC
無効電力補償装置
4日前
株式会社ミツバ
モータ
22日前
株式会社TMEIC
冷却器
25日前
テルモ株式会社
保護回路及び電子機器
5日前
大和ハウス工業株式会社
電力融通システム
18日前
富士電機株式会社
半導体装置、電力変換装置
4日前
株式会社デンソー
モータ制御装置
4日前
株式会社ワィティー
アキシャルギャップ誘導モータ
4日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ