TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024128453
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023037437
出願日
2023-03-10
発明の名称
モータ制御装置、モータ駆動装置、モータシステム、及び電気機器
出願人
ローム株式会社
代理人
弁理士法人 佐野特許事務所
主分類
H02P
21/22 20160101AFI20240913BHJP(電力の発電,変換,配電)
要約
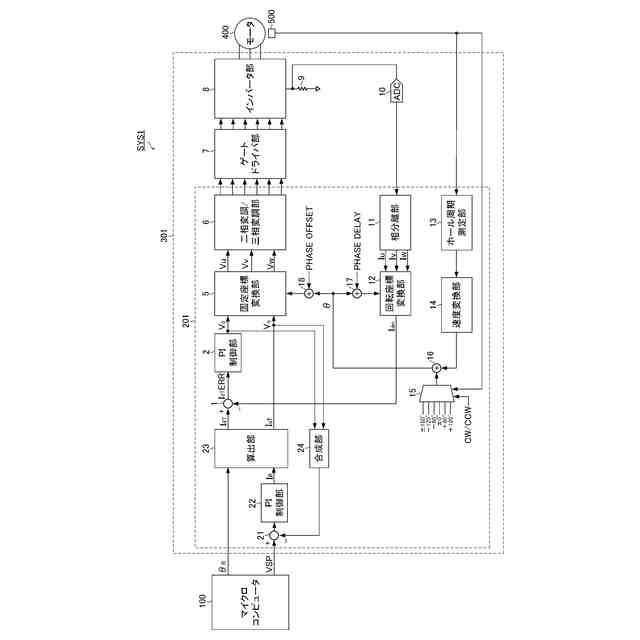
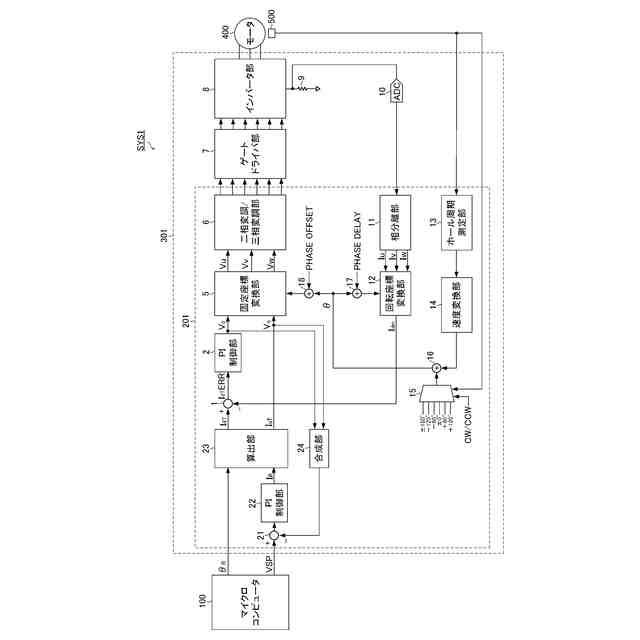
【課題】ベクトル制御の対象がIPMモータである場合であっても、外部での複雑な制御を必要とせずにモータを高効率で回転させることができるモータ制御装置を提供する。
【解決手段】モータ制御装置(201)は、算出部(23)と、制御部(5、6)と、を備える。前記算出部は、磁束成分電流及びトルク成分電流を合成した合成電流の位相目標値と、前記合成電流の大きさ目標値に対応する設定値と、に基づき、前記磁束成分電流の大きさ目標値及び前記トルク成分電流の大きさ目標値を算出するように構成されている。前記制御部は、前記算出部の算出結果を用いてベクトル制御を行うように構成されている。
【選択図】図7
特許請求の範囲
【請求項1】
磁束成分電流及びトルク成分電流を合成した合成電流の位相目標値と、前記合成電流の大きさ目標値に対応する設定値と、に基づき、前記磁束成分電流の大きさ目標値及び前記トルク成分電流の大きさ目標値を算出するように構成された算出部と、
前記算出部の算出結果を用いてベクトル制御を行うように構成された制御部と、
を備える、モータ制御装置。
続きを表示(約 700 文字)
【請求項2】
前記磁束成分電流の大きさ目標値と前記磁束成分電流の検出値との差に基づくPI制御を行うように構成された第1PI制御部と、
前記第1PI制御部の出力と前記トルク成分電流の大きさ目標値とを合成するように構成された合成部と、
前記設定値と前記合成部の出力との差に基づくPI制御を行うように構成された第2PI制御部と、
を備え、
前記算出部は、前記第2PI制御部の出力を受け取るように構成されている、請求項1に記載のモータ制御装置。
【請求項3】
前記磁束成分電流の大きさ目標値と前記磁束成分電流の検出値との差に基づくPI制御を行うように構成された第1PI制御部と、
前記トルク成分電流の大きさ目標値と前記トルク成分電流の検出値との差に基づくPI制御を行うように構成された第3PI制御部と、
を備える、請求項1に記載のモータ制御装置。
【請求項4】
前記位相目標値は、45°以上135°以下である、請求項1に記載のモータ制御装置。
【請求項5】
直流電圧を交流電圧に変換するように構成されたインバータ部と、
前記インバータ部をスイッチング制御するように構成された請求項1~4のいずれか一項に記載のモータ制御装置と、
を備える、モータ駆動装置。
【請求項6】
モータと、
前記モータを駆動するように構成された請求項5に記載のモータ駆動装置と、
を備える、モータシステム。
【請求項7】
請求項6に記載のモータシステムを備える、電気機器。
発明の詳細な説明
【技術分野】
【0001】
本明細書中に開示されている発明は、モータ制御装置、モータ駆動装置、モータシステム、及び電気機器に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、ベクトル制御を行うモータ制御回路が種々開発されている(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-175328号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ベクトル制御を行うモータ制御回路では、ベクトル制御の対象がIPM(Interior Permanent Magnet)モータである場合であっても、外部での複雑な制御を必要とせずにモータを高効率で回転させることができることが望まれている。
【課題を解決するための手段】
【0005】
本開示に係るモータ制御装置は、磁束成分電流及びトルク成分電流を合成した合成電流の位相目標値と、前記合成電流の大きさ目標値に対応する設定値と、に基づき、前記磁束成分電流の大きさ目標値及び前記トルク成分電流の大きさ目標値を算出するように構成された算出部と、前記算出部の算出結果を用いてベクトル制御を行うように構成された制御部と、を備える。
【0006】
本開示に係るモータ駆動装置は、直流電圧を交流電圧に変換するように構成されたインバータ部と、前記インバータ部をスイッチング制御するように構成された上記モータ制御装置と、を備える。
【0007】
本開示のモータシステムは、モータと、前記モータを駆動するように構成された上記モータ駆動装置と、を備える。
【0008】
本開示の電気機器は、上記モータシステムを備える。
【発明の効果】
【0009】
本開示によれば、ベクトル制御の対象がIPMモータである場合であっても、外部での複雑な制御を必要とせずにモータを高効率で回転させることができる。
【図面の簡単な説明】
【0010】
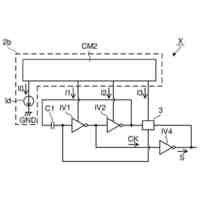
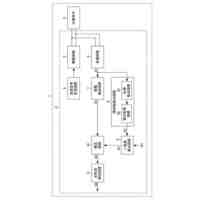
図1は、比較例に係るモータシステムの概略構成を示す図である。
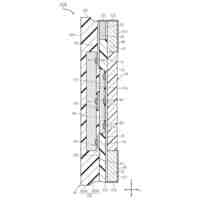
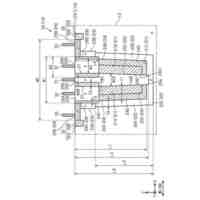
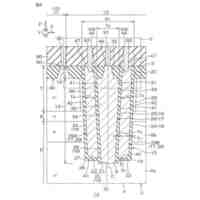
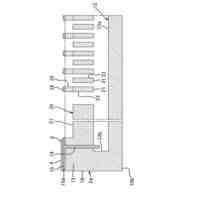
図2は、SPM(Surface Permanent Magnet)モータの概略断面図である。
図3は、IPMモータの概略断面図である。
図4は、SPMモータのマグネットトルクを示す図である。
図5は、IPMモータの合成トルクを示す図である。
図6は、IPMモータにおけるマグネットトルク、リラクタンストルク、及び合成トルクの関係を示す図である。
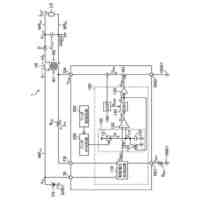
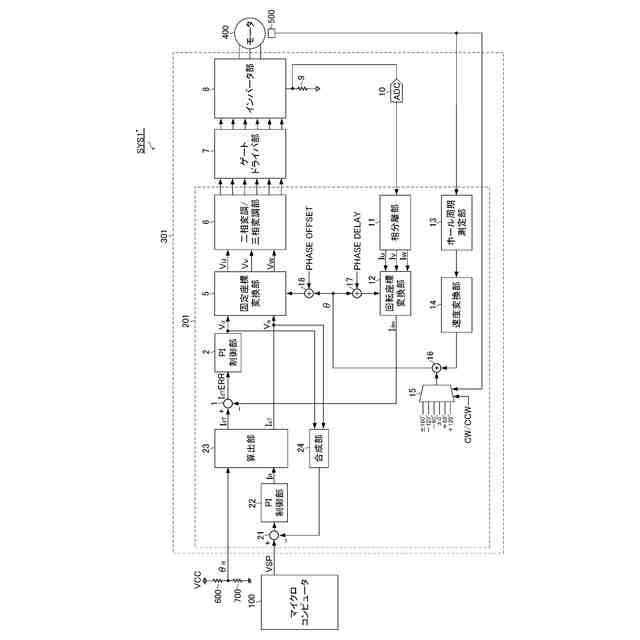
図7は、第1実施形態に係るモータシステムの概略構成を示す図である。
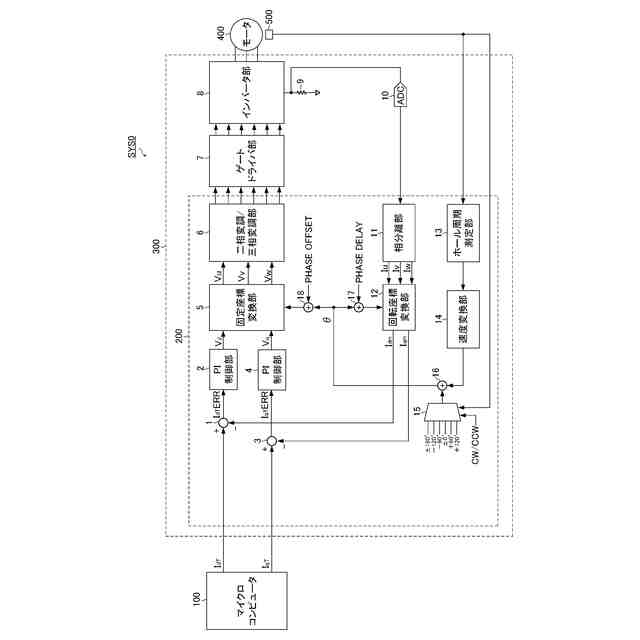
図8は、第1実施形態の変形例に係るモータシステムの概略構成を示す図である。
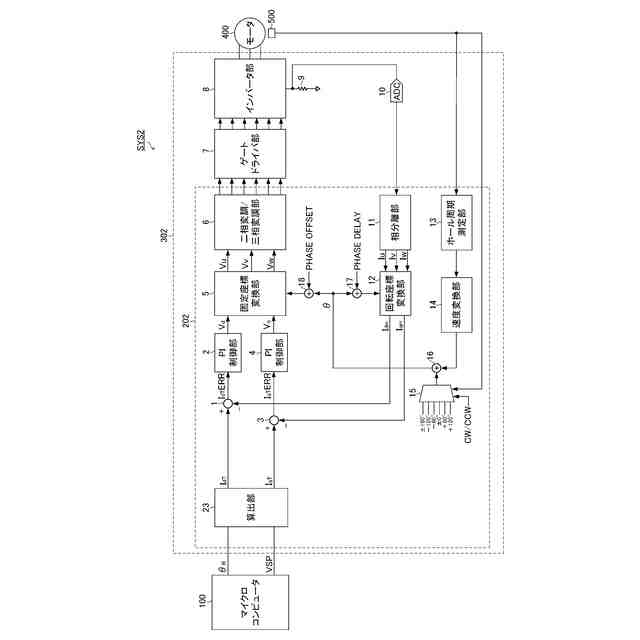
図9は、第2実施形態に係るモータシステムの概略構成を示す図である。
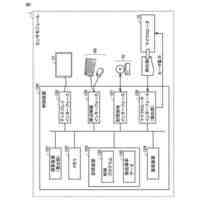
図10は、空気調和機の一構成例を示す外観図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
発振回路
4日前
ローム株式会社
半導体装置
今日
ローム株式会社
オシレータ
11日前
ローム株式会社
半導体装置
4日前
ローム株式会社
電源制御装置
今日
ローム株式会社
磁気検出装置
5日前
ローム株式会社
加速度センサ
4日前
ローム株式会社
オーディオ用半導体装置
4日前
ローム株式会社
制御回路及び非接触給電装置
11日前
ローム株式会社
D/Aコンバータ、半導体集積回路
4日前
ローム株式会社
信号処理装置、超音波センサ、及び車両
今日
ローム株式会社
半導体装置および半導体装置の製造方法
5日前
ローム株式会社
加速度センサ及び加速度センサの製造方法
5日前
ローム株式会社
降圧コンバータならびにそのコントローラ回路
11日前
ローム株式会社
ブリッジ回路の制御方法、ブリッジ回路、および電力変換装置
11日前
ローム株式会社
センサモジュール、制御装置、制御方法、および制御プログラム
4日前
ローム株式会社
半導体レーザ装置
6日前
ローム株式会社
モータ制御装置、モータ駆動装置、モータシステム、及び電気機器
今日
ローム株式会社
半導体スイッチングデバイス、ブリッジ回路、および電力変換装置
11日前
ローム株式会社
発光素子駆動装置
12日前
ローム株式会社
半導体装置の製造方法
4日前
個人
原動機
25日前
個人
ファラデー発電改良型
11日前
キヤノン電子株式会社
モータ
4日前
ニデック株式会社
モータ
15日前
キヤノン株式会社
制御装置
4日前
トヨタ自動車株式会社
ロータ
5日前
サンデン株式会社
電力変換装置
22日前
本田技研工業株式会社
回転電機
12日前
本田技研工業株式会社
回転電機
12日前
ダイハツ工業株式会社
冷却装置
12日前
株式会社ダイヘン
溶接機
21日前
サンデン株式会社
電力変換装置
22日前
ニデック株式会社
ステータ
12日前
ニデック株式会社
ステータ
12日前
中国電力株式会社
仮送電ケーブル
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ