TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024117962
公報種別
公開特許公報(A)
公開日
2024-08-30
出願番号
2023024080
出願日
2023-02-20
発明の名称
走行制御装置、走行制御方法、および走行制御用コンピュータプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20240823BHJP(信号)
要約
【課題】周辺画像に基づいて適切に車両の走行の制御を行うことができる走行制御装置を提供する。
【解決手段】走行制御装置は、現在時刻までの車両の周辺状況を表す一連の周辺画像を第1のニューラルネットワークに入力することで、現在時刻から所定時間経過した将来時刻に予測される車両の周辺状況を表す将来画像を生成し、一連の周辺画像のうち現在時刻に出力された周辺画像と、将来画像と、所定時間とを第1のニューラルネットワークとは異なる第2のニューラルネットワークに入力することで車両の走行を制御するための制御信号を生成する。
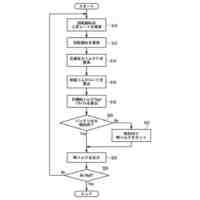
【選択図】図5
特許請求の範囲
【請求項1】
現在時刻までの車両の周辺状況を表す一連の周辺画像を第1のニューラルネットワークに入力することで、前記現在時刻から所定時間経過した将来時刻に予測される前記車両の周辺状況を表す将来画像を生成する画像生成部と、
前記一連の周辺画像のうち前記現在時刻に出力された周辺画像と、前記将来画像と、前記所定時間とを前記第1のニューラルネットワークとは異なる第2のニューラルネットワークに入力することで前記車両の走行を制御するための制御信号を生成する信号生成部と、を備える走行制御装置。
続きを表示(約 800 文字)
【請求項2】
前記画像生成部は、前記車両の速度が速度閾値よりも遅い場合に前記現在時刻から第1の所定時間経過した第1の将来時刻に対応する前記将来画像を生成し、前記車両の速度が前記速度閾値よりも速い場合に前記現在時刻から前記第1の所定時間よりも短い第2の所定時間経過した第2の将来時刻に対応する前記将来画像を生成する、請求項1に記載の走行制御装置。
【請求項3】
前記将来画像を前記車両に搭載されたディスプレイに表示させる画像表示部をさらに備える、請求項1に記載の走行制御装置。
【請求項4】
車両の走行を制御するための制御信号を生成する走行制御装置が、
現在時刻までの前記車両の周辺状況を表す一連の周辺画像を第1のニューラルネットワークに入力することで、前記現在時刻から所定時間経過した将来時刻に予測される前記車両の周辺状況を表す将来画像を生成し、
前記一連の周辺画像のうち前記現在時刻に出力された周辺画像と、前記将来画像と、前記所定時間とを前記第1のニューラルネットワークとは異なる第2のニューラルネットワークに入力することで前記制御信号を生成する、
ことを含む走行制御方法。
【請求項5】
現在時刻までの車両の周辺状況を表す一連の周辺画像を第1のニューラルネットワークに入力することで、前記現在時刻から所定時間経過した将来時刻に予測される前記車両の周辺状況を表す将来画像を生成することと、
前記一連の周辺画像のうち前記現在時刻に出力された周辺画像と、前記将来画像と、前記所定時間とを前記第1のニューラルネットワークとは異なる第2のニューラルネットワークに入力することで前記車両の走行を制御するための制御信号を生成することと、
を前記車両に搭載されたコンピュータに実行させる走行制御用コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の走行を制御するための制御信号を生成する走行制御装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
走行制御装置は、車両の周辺状況を表す周辺画像に基づいて制御信号を生成し、生成された制御信号を車両の走行機構に送信することで、車両の自動運転を実行する。
【0003】
特許文献1には、自車の周辺で所定の時間間隔で検出される物体の位置情報に基づいて物体の将来位置を予測し、物体と自車との接触可能性がある場合は警報や自動ブレーキなどの接触回避支援を実行する走行制御装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
特許第5341705号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
周辺画像に基づいて予測された将来の周辺状況に応じて生成された制御信号を用いて走行の制御を行う走行制御装置では、制御信号による走行の制御が適切でなかった場合に、その原因が将来の周辺状況の予測にあったのか周辺状況に応じた制御信号の生成にあったのかを把握し適切に対処することが容易ではない。
【0006】
本開示は、周辺画像に基づいて適切に車両の走行の制御を行うことができる走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の要旨は以下のとおりである。
【0008】
(1)現在時刻までの車両の周辺状況を表す一連の周辺画像を第1のニューラルネットワークに入力することで、前記現在時刻から所定時間経過した将来時刻に予測される前記車両の周辺状況を表す将来画像を生成する画像生成部と、
前記一連の周辺画像のうち前記現在時刻に出力された周辺画像と、前記将来画像と、前記所定時間とを前記第1のニューラルネットワークとは異なる第2のニューラルネットワークに入力することで前記車両の走行を制御するための制御信号を生成する信号生成部と、を備える走行制御装置。
【0009】
(2)前記画像生成部は、前記車両の速度が速度閾値よりも遅い場合に前記現在時刻から第1の所定時間経過した第1の将来時刻に対応する前記将来画像を生成し、前記車両の速度が前記速度閾値よりも速い場合に前記現在時刻から前記第1の所定時間よりも短い第2の所定時間経過した第2の将来時刻に対応する前記将来画像を生成する、上記(1)に記載の走行制御装置。
【0010】
(3)前記将来画像を前記車両に搭載されたディスプレイに表示させる画像表示部をさらに備える、上記(1)または(2)に記載の走行制御装置。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
組立体
3日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
端末装置
1日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
充電装置
2日前
トヨタ自動車株式会社
スペーサ
7日前
トヨタ自動車株式会社
締結工具
1日前
トヨタ自動車株式会社
伸縮装置
2日前
トヨタ自動車株式会社
移動装置
3日前
トヨタ自動車株式会社
燃料電池
3日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
燃料系配管
1日前
トヨタ自動車株式会社
車両側部構造
2日前
トヨタ自動車株式会社
負極活物質層
2日前
トヨタ自動車株式会社
ブリーザ装置
1日前
トヨタ自動車株式会社
出力調整装置
1日前
トヨタ自動車株式会社
運転支援装置
1日前
トヨタ自動車株式会社
駆動ユニット
2日前
トヨタ自動車株式会社
搬送システム
2日前
トヨタ自動車株式会社
搬送システム
2日前
トヨタ自動車株式会社
電力変換装置
2日前
トヨタ自動車株式会社
車両後部構造
7日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
部品締結構造
3日前
トヨタ自動車株式会社
物体検出装置
1日前
トヨタ自動車株式会社
情報処理装置
7日前
トヨタ自動車株式会社
組成予測方法
1日前
トヨタ自動車株式会社
運転支援装置
1日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
物体検出装置
1日前
トヨタ自動車株式会社
搬送システム
3日前
トヨタ自動車株式会社
走行制御装置
1日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ