TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024112120
公報種別
公開特許公報(A)
公開日
2024-08-20
出願番号
2023016994
出願日
2023-02-07
発明の名称
位置判定装置、位置判定システム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G01S
11/02 20100101AFI20240813BHJP(測定;試験)
要約
【課題】車両の周辺環境に起因してキーデバイスの位置を誤判定することを低減可能な位置判定装置、位置判定システムを提供する。
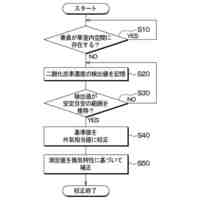
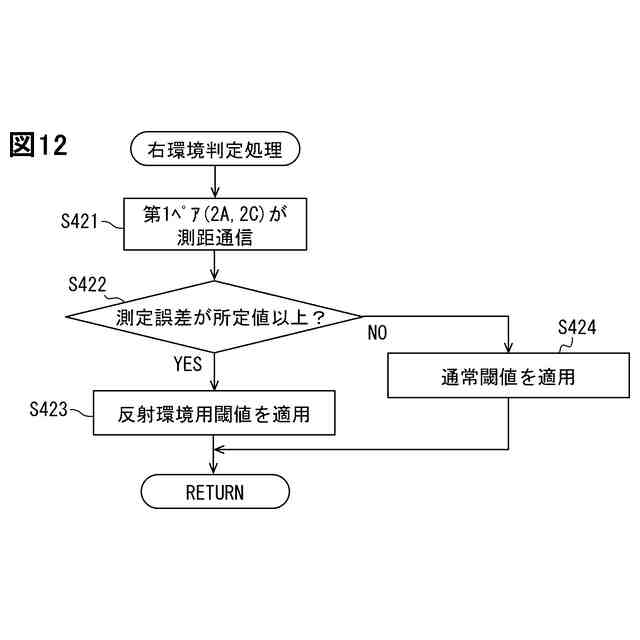
【解決手段】DK-ECUは、所定の組み合わせのアンカー同士に測距通信を実行させることにより、当該アンカー間の距離の測定値である測距値を取得する。DK-ECUは、アンカー間の測距値が、事前登録されているアンカー間の距離との差を計測誤差として算出する。DK-ECUは、計測誤差が所定の閾値以上である場合には、周辺環境は反射環境であると判定し、キーデバイスが対象エリアに存在すると判定するための閾値を、通常環境用の閾値から、反射環境用の閾値に変更する。
【選択図】図12
特許請求の範囲
【請求項1】
車両に対するキーデバイスの位置を判定する位置判定装置であって、
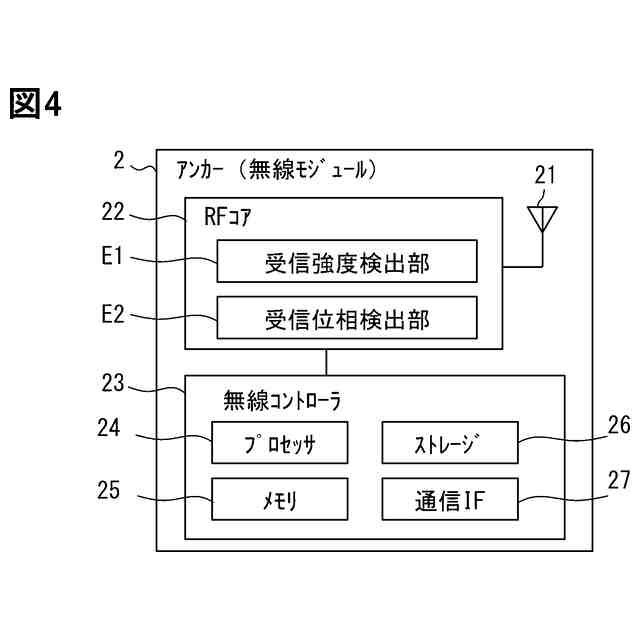
前記キーデバイスと無線通信を実施可能に構成されている複数の無線モジュール(2)と通信するための通信回路(6)と、
複数の前記無線モジュールのそれぞれから入力されるデータに基づいて前記キーデバイスの位置を判定する判定部(4)と、を備え、
前記判定部は、
複数の前記無線モジュールのうちの1つと前記キーデバイスとの無線通信である第1通信をもとに、前記無線モジュールから前記キーデバイスまでの距離に関連するデータである第1データを取得することと、
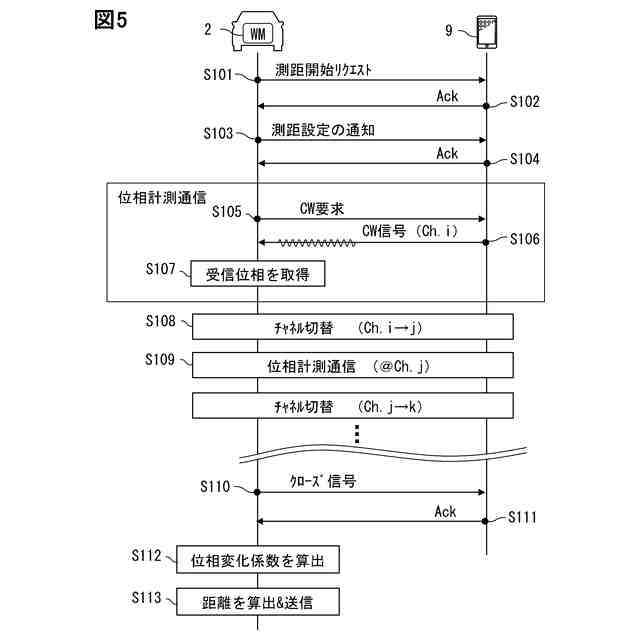
前記無線モジュール同士の無線通信である第2通信を、複数の前記無線モジュールの少なくとも2つに実施させることにより、前記無線モジュール同士の距離に関連するデータである第2データを取得することと、
前記第2データに基づいて前記車両の周辺環境を判定することと、
前記周辺環境についての判定結果と前記第1データに基づいて、前記キーデバイスが所定の対象エリアに存在するか否かを判定することと、を実施する位置判定装置。
続きを表示(約 2,300 文字)
【請求項2】
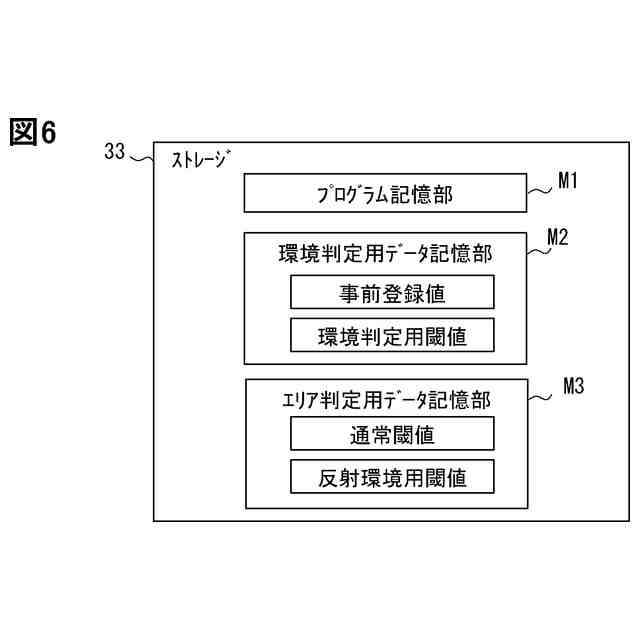
前記周辺環境を識別するための環境判定用閾値が保存されている環境判定用データ記憶部(M2)を備え、
前記判定部は、前記第2データに応じて定まる、前記無線モジュール同士の距離と前記環境判定用閾値とを比較し、その比較結果をもとに前記周辺環境の種別を判定するように構成されている、請求項1に記載の位置判定装置。
【請求項3】
前記周辺環境を識別するためのパラメータである環境判定用閾値が保存されている環境判定用データ記憶部(M2)と、
前記キーデバイスが前記対象エリアに存在するか否かを判定するための、前記周辺環境の種別毎のエリア判定用閾値が保存されているエリア判定用データ記憶部(M3)と、を備え、
前記判定部は、
前記第2データに基づいて特定される前記無線モジュール同士の距離値と、前記環境判定用閾値とを比較することによって前記周辺環境の種別を判定し、
前記判定部によって判定された前記周辺環境に対応づけられている前記エリア判定用閾値と、前記第1データに基づいて特定される、前記無線モジュールから前記キーデバイスまでの距離値とを比較することにより、前記キーデバイスが前記対象エリアにあるか否かを判定する、請求項1に記載の位置判定装置。
【請求項4】
前記無線モジュール同士の距離を示すデータと、前記周辺環境を識別するためのパラメータである環境判定用閾値が保存されている環境判定用データ記憶部(M2)を備え、
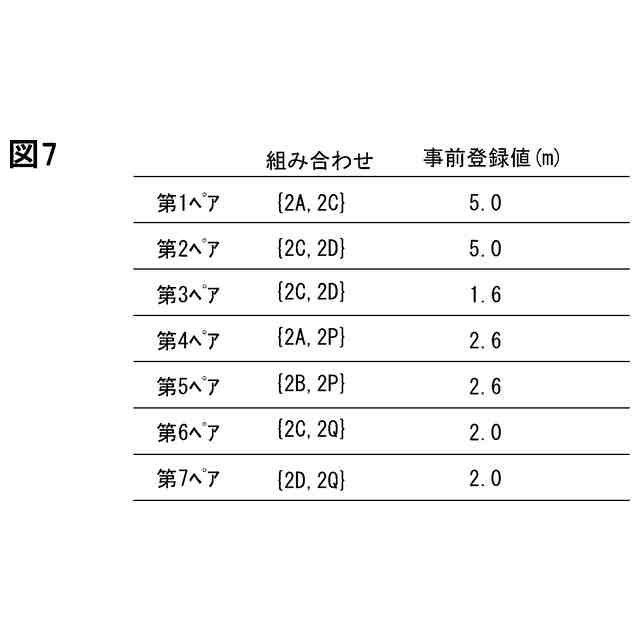
前記判定部は、前記第2データに基づいて特定される前記無線モジュール同士の距離値と、前記環境判定用データ記憶部に保存されている前記距離である事前登録値とに基づいて、前記周辺環境がマルチパス環境であるか否かを判定する請求項1に記載の位置判定装置。
【請求項5】
前記判定部は、
複数の前記無線モジュールのそれぞれにおける前記第1通信をもとに、複数の前記無線モジュールのそれぞれから前記第1データを取得し、
前記無線モジュール毎の前記第1データに基づいて、複数の前記無線モジュールの中から他の前記無線モジュールと無線通信を実施させる前記無線モジュールの組み合わせを選択し、
選択した前記無線モジュールの組み合わせにおいて前記第2通信を実施させる請求項1に記載の位置判定装置。
【請求項6】
前記判定部は、前記第2データに基づく前記周辺環境の判定を実施してから、少なくとも1つの前記無線モジュールに前記第1通信を実施させる、請求項1に記載の位置判定装置。
【請求項7】
前記車両が駐車されていることを示す信号を受信する受信部(7)を備え、
前記判定部は、
前記信号に基づき前記車両が駐車されているか否かを判定し、
前記車両が駐車されている場合に、少なくとも2つの前記無線モジュールに前記第2通信を実施させるように構成されている、請求項1に記載の位置判定装置。
【請求項8】
前記判定部は、
駐車された際の位置情報又は周辺監視センサの出力信号に基づいて、前記車両の隣に他車両が駐車可能な場所に駐車されたか否かを判定し、
前記車両の隣に他車両が駐車可能な場所に駐車されていると判定している場合には、所定の第1間隔で定期的に前記第2通信を実施させることにより、前記周辺環境の判定結果を定期更新する一方、
前記車両の隣に他車両が駐車可能な場所に駐車されていると判定していない場合には、定期的な前記第2通信を実施させないか、又は、前記第1間隔よりも長い第2間隔で前記第2通信を実施させる、請求項7に記載の位置判定装置。
【請求項9】
前記無線通信は、Bluetooth(登録商標)信号を用いて実施される請求項1に記載の位置判定装置。
【請求項10】
ユーザによって携帯されるキーデバイスと無線通信を実施可能に構成されている複数の無線モジュール(2)と、
車両に対するキーデバイスの位置を判定する位置判定装置(1)と、を含む位置判定システムであって、
前記位置判定装置は、
複数の前記無線モジュールと通信するための通信回路(6)と、
複数の前記無線モジュールのそれぞれから入力されるデータに基づいて前記キーデバイスの位置を判定する判定部(4)と、を備え、
前記判定部は、
複数の前記無線モジュールのうちの1つと前記キーデバイスとの無線通信である第1通信をもとに、前記無線モジュールから前記キーデバイスまでの距離に関連するデータである第1データを取得することと、
前記無線モジュール同士の無線通信である第2通信を、複数の前記無線モジュールの少なくとも2つに実施させることにより、前記無線モジュール同士の距離に関連するデータである第2データを取得することと、
前記第2データに基づいて前記車両の周辺環境を判定することと、
前記周辺環境についての判定結果と前記第1データに基づいて、前記キーデバイスが所定の対象エリアに存在するか否かを判定することと、を実施し、
前記無線モジュールは、
前記第1通信を実行し、前記第1データを前記判定部に送信することと、
前記判定部からの指示に基づき前記第2通信を実行し、前記第1データを前記判定部に送信することと、を実施する位置判定システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、キーデバイスの位置を判定する技術に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、複数の車載通信機におけるキーデバイスからの信号の受信状況に基づいて、キーデバイスの位置検出を行うアクセスモジュールが開示されている。特許文献1に開示のアクセスモジュールは、キーデバイスと複数の周波数の連続波信号を送受信することよって複数の位相差情報を生成し、デバイス距離を測る。ここでのデバイス距離は、車載通信機からキーデバイスまでの距離である。周波数ごとの位相差情報は、往復飛行時間、換言すれば、車載通信機からキーデバイスまでの距離を示すデータとして用いられる。
【先行技術文献】
【特許文献】
【0003】
特表2022-524644号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
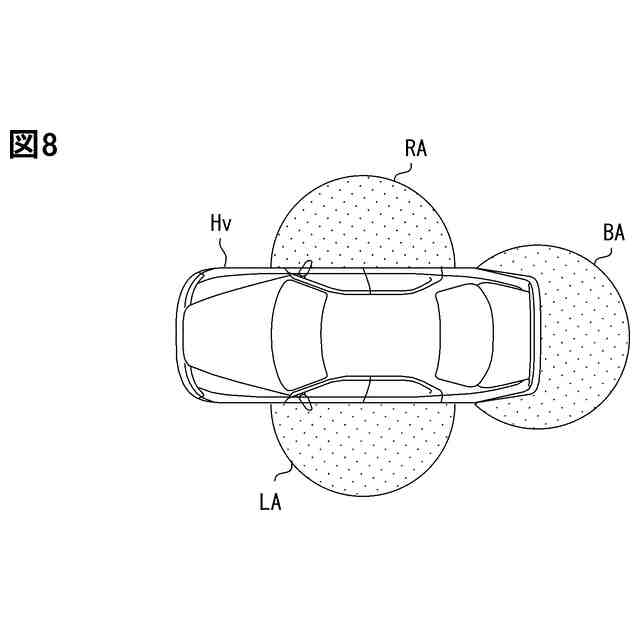
電波の飛行時間をもとにデバイス距離を測定する場合では、車両の周辺環境の状況によって、デバイス距離の値(以降、測距値とも記載)にばらつきが生じうる。例えばマルチパス環境では、反射波成分に起因して測距値は真値よりも大きい値となりうる。その結果、車両を基準として定まる所定の対象エリア内にキーデバイスが存在するにも関わらず、キーデバイスが対象エリア外に存在すると誤判定することが起こりうる。
【0005】
本開示は、上記の課題に基づいて成されたものであり、その目的の1つは、車両の周辺環境に起因してキーデバイスの位置を誤判定することを低減可能な位置判定装置、位置判定システムを提供することにある。
【課題を解決するための手段】
【0006】
ここに開示される位置判定装置は、車両に対するキーデバイスの位置を判定する位置判定装置であって、キーデバイスと無線通信を実施可能に構成されている複数の無線モジュール(2)と通信するための通信回路(6)と、複数の無線モジュールのそれぞれから入力されるデータに基づいてキーデバイスの位置を判定する判定部(4)と、を備え、判定部は、複数の無線モジュールのうちの1つとキーデバイスとの無線通信である第1通信をもとに、無線モジュールからキーデバイスまでの距離に関連するデータである第1データを取得することと、無線モジュール同士の無線通信である第2通信を、複数の無線モジュールの少なくとも2つに実施させることにより、無線モジュール同士の距離に関連するデータである第2データを取得することと、第2データに基づいて車両の周辺環境を判定することと、周辺環境についての判定結果と第1データに基づいて、キーデバイスが所定の対象エリアに存在するか否かを判定することと、を実施する。
【0007】
上記位置判定装置が備える判定部は、単に、キーデバイスまでの距離を示す第1データだけを用いてキーデバイスが対象エリア内に存在するのか否かを判定するのではない。上記判定部は、無線モジュール同士の通信によって得られる、無線モジュール間の距離を示す第2データに基づいて車両の周辺環境を判定し、第1データに加えて当該周辺環境の判定結果をもとにキーデバイスが対象エリア内に存在するのか否かを判定する。
【0008】
この構成は、周辺環境が反射環境である場合には周辺環境が反射環境ではない場合に比べて第2データをもとに定まる距離の計測値が増大することから、第2データは周辺環境の判断材料として機能しうるといった知見に基づいて創出されたものである。上記構成によれば、周辺環境に応じた方法/条件にてキーデバイスが対象エリア内に存在するか否かが判定されることとなる。そのため、車両の周辺環境に起因してキーデバイスの位置を誤判定することを低減できる。
【0009】
また本開示に含まれる判定システムは、ユーザによって携帯されるキーデバイスと無線通信を実施可能に構成されている複数の無線モジュール(2)と、車両に対するキーデバイスの位置を判定する位置判定装置(1)と、を含む位置判定システムであって、位置判定装置は、複数の無線モジュールと通信するための通信回路(6)と、複数の無線モジュールのそれぞれから入力されるデータに基づいてキーデバイスの位置を判定する判定部(4)と、を備え、判定部は、複数の無線モジュールのうちの1つとキーデバイスとの無線通信である第1通信をもとに、無線モジュールからキーデバイスまでの距離に関連するデータである第1データを取得することと、無線モジュール同士の無線通信である第2通信を、複数の無線モジュールの少なくとも2つに実施させることにより、無線モジュール同士の距離に関連するデータである第2データを取得することと、第2データに基づいて車両の周辺環境を判定することと、周辺環境についての判定結果と第1データに基づいて、キーデバイスが所定の対象エリアに存在するか否かを判定することと、を実施し、無線モジュールは、第1通信を実行し、第1データを判定部に送信することと、判定部からの指示に基づき第2通信を実行し、第1データを判定部に送信することと、を実施する。
【0010】
上記位置判定システムは、上記の位置判定装置と同様の作用に同様の効果を奏する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
10日前
株式会社デンソーエレクトロニクス
発音器
11日前
株式会社デンソーエレクトロニクス
継電器
16日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
受電装置
11日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
10日前
株式会社デンソー
清掃装置
10日前
株式会社デンソー
表示装置
21日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
光学部材
1日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
ロータコア
8日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
電子制御装置
10日前
株式会社デンソー
換気システム
1日前
株式会社デンソー
電子制御装置
11日前
株式会社デンソー
アクセル装置
4日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソー
電力変換装置
23日前
株式会社デンソー
音声取得装置
14日前
株式会社デンソーエレクトロニクス
ヒューズ装置
21日前
株式会社デンソー
電力変換装置
15日前
株式会社デンソー
電子制御装置
15日前
株式会社デンソー
電子制御装置
17日前
株式会社デンソーエレクトロニクス
電流遮断装置
1日前
株式会社デンソー
電子制御装置
9日前
株式会社デンソーウェーブ
認証システム
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ