TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024091989
公報種別
公開特許公報(A)
公開日
2024-07-05
出願番号
2024073668,2022134668
出願日
2024-04-30,2018-10-04
発明の名称
作業車両
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20240628BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】後進時における自動操舵を簡単に行うことができるようにする。
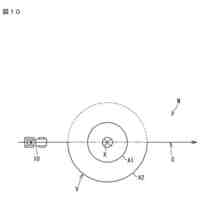
【解決手段】作業車両は、車体と、走行装置と、ステアリングハンドルと、測位装置と、指令スイッチと、操舵切換スイッチと、操舵切換スイッチによって自動操舵の開始が行われた際に、走行基準ラインに対応する走行予定ラインに沿って車体が前進、又は当該前進と反対方向に後進するように、自動操舵の指令を行う制御装置と、手動操舵及び自動操舵の両方において、車体の前進と後進とを切り換える操作を行う操作部材と、走行装置の回転方向に基づいて車体の後進を検出する後進検出装置と、車体の後部に設けられる作業装置と、作業装置を昇降可能な昇降装置と、を備え、制御装置は、操舵切換スイッチによって自動操舵の開始が指令され、自動操舵が終了するまでの間において、後進検出装置による検出情報によって車体が後進していると判断すると、車体が走行予定ラインに沿って後進しながら走行するように自動操舵を実行する。
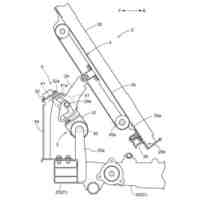
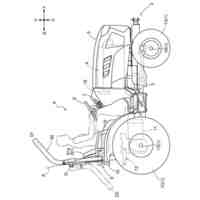
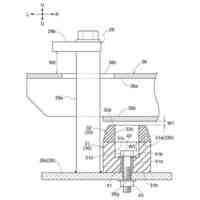
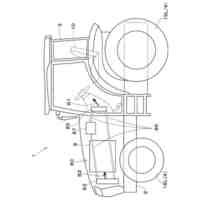
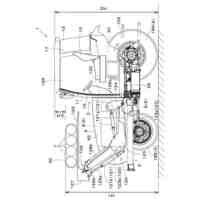
【選択図】図1
特許請求の範囲
【請求項1】
車体と、
回転することで前記車体を走行可能に支持する走行装置と、
前記車体の操舵を行うステアリングハンドルと、
前記車体の位置を検出可能な測位装置と、
前記測位装置によって検出された前記車体の位置を走行基準ラインに設定する指令スイッチと、
前記ステアリングハンドルによる手動操舵とは別の自動操舵の開始及び終了のいずれかを切り換える操舵切換スイッチと、
前記操舵切換スイッチによって前記自動操舵の開始が行われた際に、前記走行基準ラインに対応する走行予定ラインに沿って前記車体が前進、又は当該前進と反対方向に後進するように、自動操舵の指令を行う制御装置と、
前記手動操舵及び前記自動操舵の両方において、前記車体の前進と後進とを切り換える操作を行う操作部材と、
前記走行装置の回転方向に基づいて前記車体の後進を検出する後進検出装置と、
前記車体の後部に設けられる作業装置と、
前記作業装置を昇降可能な昇降装置と、
を備え、
前記制御装置は、前記操舵切換スイッチによって自動操舵の開始が指令され、自動操舵が終了するまでの間において、前記後進検出装置による検出情報によって前記車体が後進していると判断すると、前記車体が前記走行予定ラインに沿って後進しながら走行するように自動操舵を実行する作業車両。
続きを表示(約 570 文字)
【請求項2】
前記昇降装置による昇降を操作する昇降スイッチを備え、
前記制御装置は、前記後進の自動操舵の場合は前記昇降スイッチの操作による前記昇降を可能とする請求項1に記載の作業車両。
【請求項3】
前記制御装置は、前記車体が後進を開始してから所定距離を進んだ場合に、前記操舵切換スイッチを前記自動操舵の終了に切り換えた際の前記車体の終了位置を保持する請求項1又は2に記載の作業車両。
【請求項4】
前記車体の終了位置に対して前記車体の幅方向にシフトしたシフト位置に、前記車体が近づいたことを報知する報知装置を備えている請求項3に記載の作業車両。
【請求項5】
前記車体が後進したことを作動条件として前記昇降装置を上昇させるオートアップ装置を備え、
前記制御装置は、前記手動操舵で且つ前記車体が後進した場合は前記オートアップ装置による前記昇降装置の上昇を行う請求項1~4のいずれか1項に記載の作業車両。
【請求項6】
前記車体が後進したことを作動条件として前記昇降装置を上昇させるオートアップ装置を備え、
前記制御装置は、前記後進の自動操舵の場合は前記オートアップ装置による前記昇降装置の上昇を行わない請求項1~5のいずれか1項に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、トラクタ等の作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、農作業機として特許文献1が知られている。特許文献1の農作業機は、手動操舵による手動走行と、走行基準ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。また、農作業機は、畝に沿って走行中に右指示ボタンを押した後、走行基準ラインの始点が設定され、走行中に左指示ボタンを押すことによって走行基準ラインの終点が設定される。即ち、自動操舵前に走行基準ラインの設定を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2017-123803号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の農作業機では、切替スイッチによって手動走行から自動走行に切り換えることにより、簡単に自動走行を行うことができる。農作業機において、後進をしながら自動走行をすることについて考慮されていないのが実情である。
【0005】
そこで、本発明は上記問題点に鑑み、後進時における自動操舵を簡単に行うことができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
この技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。
【0007】
作業車両は、車体と、回転することで前記車体を走行可能に支持する走行装置と、前記車体の操舵を行うステアリングハンドルと、前記車体の位置を検出可能な測位装置と、前記測位装置によって検出された前記車体の位置を走行基準ラインに設定する指令スイッチと、前記ステアリングハンドルによる手動操舵とは別の自動操舵の開始及び終了のいずれかを切り換える操舵切換スイッチと、前記操舵切換スイッチによって前記自動操舵の開始が行われた際に、前記走行基準ラインに対応する走行予定ラインに沿って前記車体が前進、又は当該前進と反対方向に後進するように、自動操舵の指令を行う制御装置と、前記手動操舵及び前記自動操舵の両方において、前記車体の前進と後進とを切り換える操作を行う操作部材と、前記走行装置の回転方向に基づいて前記車体の後進を検出する後進検出装置と、前記車体の後部に設けられる作業装置と、前記作業装置を昇降可能な昇降装置と、を備え、前記制御装置は、前記操舵切換スイッチによって自動操舵の開始が指令され、自動操舵が終了するまでの間において、前記後進検出装置による検出情報によって前記車体が後進していると判断すると、前記車体が前記走行予定ラインに沿って後進しながら走行するように自動操舵を実行する。
【0008】
作業車両は、前記昇降装置による昇降を操作する昇降スイッチを備え、前記制御装置は、前記後進の自動操舵の場合は前記昇降スイッチの操作による前記昇降を可能とする。
【0009】
前記制御装置は、前記車体が後進を開始してから所定距離を進んだ場合に、前記操舵切換スイッチを前記自動操舵の終了に切り換えた際の前記車体の終了位置を保持する。
【0010】
前記車体の終了位置に対して前記車体の幅方向にシフトしたシフト位置に、前記車体が近づいたことを報知する報知装置を備えている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
8日前
株式会社クボタケミックス
製管機
3日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタケミックス
製管機
3日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
移植機
3日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ