TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024086832
公報種別
公開特許公報(A)
公開日
2024-06-28
出願番号
2024062554,2019209482
出願日
2024-04-09,2019-11-20
発明の名称
ロボットシステム、および、ロボット装置
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
G06N
20/00 20190101AFI20240621BHJP(計算;計数)
要約
【課題】 既存の複数のセンサデータから疑似的なセンサデータを生成する技術を提供する。
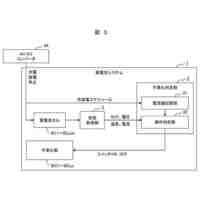
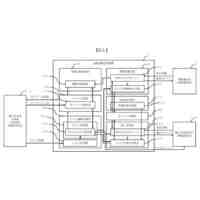
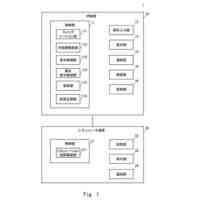
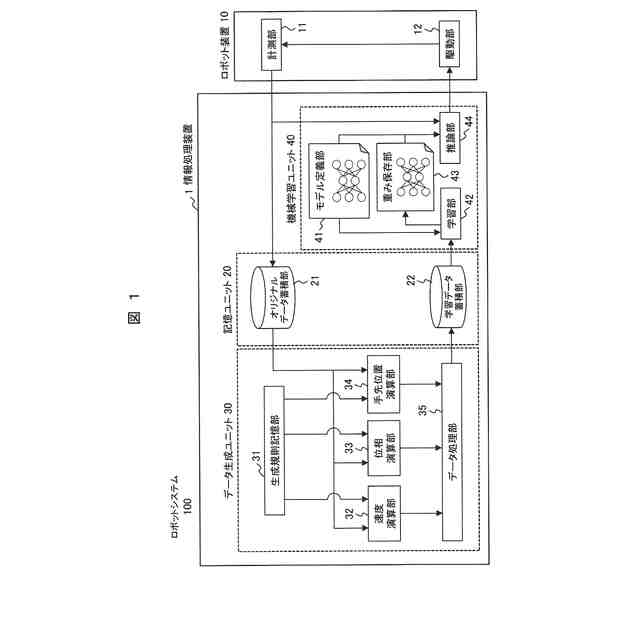
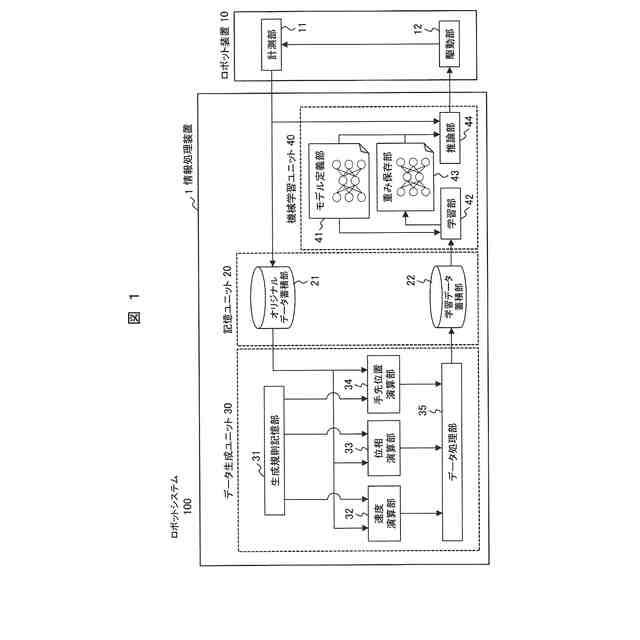
【解決手段】 計測部は、ロボット装置の状態を計測する第1センサおよび周囲の状況を計測する第2センサを含み、情報処理装置は、速度の変更値等の拡張データ生成規則を記憶するメモリと、拡張データ生成規則の変更値を用いて第1センサ及び第2センサから取得した時系列のオリジナルデータをデータ拡張することにより、第1センサに関する時系列の拡張データと第2センサに関する時系列の拡張データを生成し、該時系列の拡張データと時系列のオリジナルデータを含む第1センサに関する時系列データおよび第2センサに関する時系列データを組み合わせた、時系列の学習データを出力し、学習データを用いて機械学習モデルを機械学習し、学習した機械学習モデルを用いて動作指令値を生成するプロセッサと、を備え、駆動部は、動作指令値に基づいて制御される。
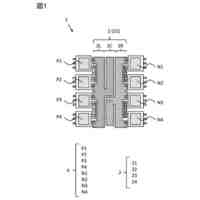
【選択図】 図1
特許請求の範囲
【請求項1】
複数の計測部と複数の駆動部とを備えるロボット装置と、
前記計測部からセンサデータを取得し、前記ロボット装置に動作指令値を出力する情報処理装置と、を備えるロボットシステムであって、
前記計測部は、ロボット装置の状態を計測する第1センサおよび周囲の状況を計測する第2センサを含み、
前記情報処理装置は、
少なくとも1つの速度の変更値、少なくとも1つの位相の変更値、少なくとも1つの位置の変更値、または、少なくとも1つの大きさの変更値の、少なくとも1つの拡張データ生成規則を記憶するメモリと、
前記拡張データ生成規則の少なくとも1つの変更値を用いて前記第1センサ及び前記第2センサから取得した時系列のオリジナルデータをデータ拡張することにより、前記第1センサに関する時系列の拡張データと前記第2センサに関する時系列の拡張データを生成し、該時系列の拡張データと前記時系列のオリジナルデータを含む前記第1センサに関する時系列データおよび前記第2センサに関する時系列データを組み合わせた、前記時系列の学習データを出力し、前記学習データを用いて機械学習モデルを機械学習し、学習した前記機械学習モデルを用いて動作指令値を生成するプロセッサと、を備え、
前記駆動部は、前記動作指令値に基づいて制御されることを特徴とするロボットシステム。
続きを表示(約 780 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
前記ロボット装置は、多関節ロボットであり、
前記駆動部は、前記動作指令値に基づいて、複数の駆動部がロボット装置の各関節の角度を変更させることを特徴とするロボットシステム。
【請求項3】
請求項2に記載のロボットシステムにおいて、
前記ロボット装置は、ロボットハンドを備え、
前記動作指令値は把持動作指令値であり、
前記ロボットハンドは、前記把持動作指令値に従い、対象物を把持することを特徴とするロボットシステム。
【請求項4】
複数の計測部と複数の駆動部とを備えるロボット装置であって、
少なくとも1つの速度の変更値、少なくとも1つの位相の変更値、少なくとも1つの位置の変更値、または、少なくとも1つの大きさの変更値の、少なくとも1つの拡張データ生成規則を記憶するメモリと、
前記拡張データ生成規則の少なくとも1つの変更値を用いて、ロボット装置の状態を計測する第1センサ及び周囲の状況を計測する第2センサから取得した時系列のオリジナルデータをデータ拡張することにより、前記第1センサに関する時系列の拡張データと前記第2センサに関する時系列の拡張データを生成し、該時系列の拡張データと前記時系列のオリジナルデータを含む前記第1センサに関する時系列データおよび前記第2センサに関する時系列データを組み合わせた、前記時系列の学習データを出力し、前記学習データを用いて機械学習モデルを機械学習し、学習した前記機械学習モデルを用いて動作指令値を生成するプロセッサと、を備える情報処理装置から出力される前記動作指令値に基づいて、前記複数の駆動部は、前記ロボット装置の各関節の角度を変更させることを特徴とするロボット装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、少量のオリジナルデータに基づいて、機械学習のための大量の学習データを生成し、その大量の学習データを用いて機械学習を実行するロボットシステム、および、ロボット装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
深層学習をはじめとする機械学習は、これまで難しかった複雑な認識や識別を高精度に実現する学習方法として注目されている。効率的な機械学習には、十分な数の学習データが必要であり、例えば、画像認識分野の深層学習の場合は、数万~数億の画像データを学習データとすることで、従来手法を超える物体認識精度を実現している。
【0003】
画像認識分野の深層学習を開示する文献としては、例えば、非特許文献1がある。この文献では、画像データにパラメトリックな変形を施し、疑似的な学習データ、つまり疑似的な学習データを複数作成する方法を開示している。この文献で用いられるパラメトリックな変形の例としては、画像に対する輝度調整、反転、歪み、拡大縮小等がある。
【0004】
また、特許文献1では、時系列データである生体データから疑似的な生体データを生成するデータ生成装置を開示している。このデータ生成装置は、日常的に生じる生体データの変動を反映した疑似的なデータを予め生成することで、装着者や装着状態の認識精度が向上するというものである。
【先行技術文献】
【特許文献】
【0005】
特開2019-25311号公報
【非特許文献】
【0006】
Ciresanほか著、「Deep Big Simple Neural Nets Excel on Handwritten Digit Recognition」、Computation、2010年12月、Vol.22、No.12
【発明の概要】
【発明が解決しようとする課題】
【0007】
深層学習を用いたロボット動作の生成方法としては、人の情報処理を模擬したマルチモーダル深層学習が提案されている。マルチモーダル深層学習は、複数のセンサ情報(例えば、画像や音声、テキストなど)を統合的に処理・学習することで、これまで難しかった複雑な形状の物体操作や、複雑な環境変化に対し、柔軟な動作を自律的に実行可能にするものである。しかしながら、ロボット装置に移動対象物の把持を学習させる場合、対象物の移動速度や把持タイミングなどの学習データを大量に用意する必要があり、膨大な計算コストが必要になるという問題があった。
【0008】
そこで、本発明では、ロボット装置が移動対象物を把持するような複雑な環境下でも容易に深層学習できるようにするため、少量の時系列のオリジナルデータに基づいて、大量の学習データを容易に生成できるロボットシステムを提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明に係るロボットシステムは、複数の計測部と複数の駆動部とを備えるロボット装置と、前記計測部からセンサデータを取得し、前記ロボット装置に動作指令値を出力する情報処理装置と、を備えるロボットシステムであって、前記計測部は、ロボット装置の状態を計測する第1センサおよび周囲の状況を計測する第2センサを含み、前記情報処理装置は、少なくとも1つの速度の変更値、少なくとも1つの位相の変更値、少なくとも1つの位置の変更値、または、少なくとも1つの大きさの変更値の、少なくとも1つの拡張データ生成規則を記憶するメモリと、前記拡張データ生成規則の少なくとも1つの変更値を用いて前記第1センサ及び前記第2センサから取得した時系列のオリジナルデータをデータ拡張することにより、前記第1センサに関する時系列の拡張データと前記第2センサに関する時系列の拡張データを生成し、該時系列の拡張データと前記時系列のオリジナルデータを含む前記第1センサに関する時系列データおよび前記第2センサに関する時系列データを組み合わせた、前記時系列の学習データを出力し、前記学習データを用いて機械学習モデルを機械学習し、学習した前記機械学習モデルを用いて動作指令値を生成するプロセッサと、を備え、前記駆動部は、前記動作指令値に基づいて制御されるものとした。
【発明の効果】
【0010】
本発明のロボットシステムによれば、少量の時系列のオリジナルデータに基づいて、大量の時系列の学習データを容易に生成できるため、ロボット装置のロボットハンドが移動物体を把持するような複雑な環境下でも、大量の学習データに基づいて適切な機械学習を実行することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
制御装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
蓄電池システム及びその制御方法
2日前
株式会社日立製作所
生成支援プログラムおよび生成支援装置
2日前
株式会社日立製作所
情報処理装置、情報処理システム及び情報処理方法
3日前
株式会社日立製作所
インシデント対応支援システム及びインシデント対応支援方法
4日前
株式会社日立製作所
地域情報管理装置、地域情報管理方法および地域情報管理プログラム
2日前
株式会社日立製作所
エレベーター及び乗りかご
9日前
株式会社日立製作所
環境負荷低減支援装置、環境負荷低減支援システム、及び環境負荷低減支援方法
9日前
株式会社日立製作所
証明書処理システム、証明生成システム、証明書処理方法、証明書処理プログラム
2日前
株式会社日立製作所
バッテリパック処理方法、非一時的コンピュータ可読媒体、およびバッテリパック処理装置
9日前
個人
非正規コート
12日前
個人
人物再現システム
9日前
個人
AI飲食最適化プラグイン
2日前
個人
電話管理システム及び管理方法
3日前
有限会社ノア
データ読取装置
10日前
キヤノン電子株式会社
通信システム
23日前
株式会社ザメディア
出席管理システム
17日前
個人
広告提供システムおよびその方法
12日前
個人
日誌作成支援システム
9日前
トヨタ自動車株式会社
工程計画装置
17日前
株式会社タクテック
商品取出集品システム
16日前
トヨタ自動車株式会社
作業判定方法
18日前
個人
ポイント還元付き配送システム
10日前
トヨタ自動車株式会社
作業評価装置
23日前
ミサワホーム株式会社
情報処理装置
16日前
オベック実業株式会社
接続構造
9日前
株式会社NURSY
再就職の支援装置
24日前
株式会社村田製作所
動き検知装置
16日前
個人
公益寄付インタラクティブシステム
23日前
トヨタ自動車株式会社
情報処理システム
18日前
ゼネラル株式会社
RFIDタグ付き物品
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ