TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024083093
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2022197410
出願日
2022-12-09
発明の名称
作業車両の管理システム
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G06Q
50/02 20240101AFI20240613BHJP(計算;計数)
要約
【課題】圃場の形状に適した作業計画を立案すること。
【解決手段】実施形態に係る作業車両の管理システムは、作業車両と、制御手段とを備える。作業車両は、自動走行しながら圃場で作業を行う。制御手段は、複数の圃場に関するデータであり圃場の形状情報を含む圃場データと、複数の作業車両に関するデータであり作業車両の作業幅情報を含む作業車両データとを有し、圃場データおよび作業車両データに基づいて、作業対象の圃場に対応する作業車両を作業対象の圃場へ差し向ける。制御手段は、圃場データから、圃場に狭小部が存在する場合には狭小部の狭小度合いに応じて狭小部のランク付けを行い、作業車両データから、作業車両の作業幅に応じて作業幅のランク付けを行い、狭小部のランクおよび作業幅のランクを対応させて、圃場に作業車両を割り当てる。
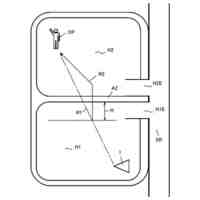
【選択図】図7
特許請求の範囲
【請求項1】
自動走行しながら圃場で作業を行う作業車両と、
複数の前記圃場に関するデータであり前記圃場の形状情報を含む圃場データと、複数の前記作業車両に関するデータであり前記作業車両の作業幅情報を含む作業車両データとを有し、前記圃場データおよび前記作業車両データに基づいて、作業対象の前記圃場に対応する前記作業車両を当該圃場へ差し向ける制御手段と
を備え、
前記制御手段は、
前記圃場データから、前記圃場に狭小部が存在する場合には該狭小部の狭小度合いに応じて該狭小部のランク付けを行い、
前記作業車両データから、前記作業車両の作業幅に応じて該作業幅のランク付けを行い、
前記狭小部のランクおよび前記作業幅のランクを対応させて、前記圃場に前記作業車両を割り当てる
ことを特徴とする作業車両の管理システム。
続きを表示(約 550 文字)
【請求項2】
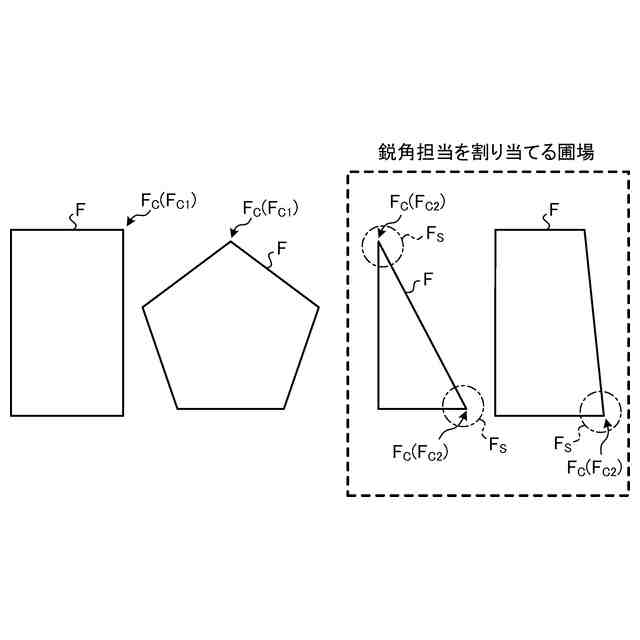
前記狭小部は、前記圃場の角部の角度が鋭角となった部分であり、前記角部の角度が小さいほど狭小度合いが大きくなり、
前記制御手段は、
前記圃場には、前記狭小部の狭小度合いが大きいほど前記作業幅の小さい前記作業車両を割り当てる
ことを特徴とする請求項1に記載の作業車両の管理システム。
【請求項3】
前記制御手段は、
前記狭小部が存在する前記圃場に対して前記作業幅の小さい前記作業車両を含む複数の前記作業車両を割り当てる
ことを特徴とする請求項2に記載の作業車両の管理システム。
【請求項4】
前記作業車両データは、前記作業車両の馬力情報を含み、
前記制御手段は、
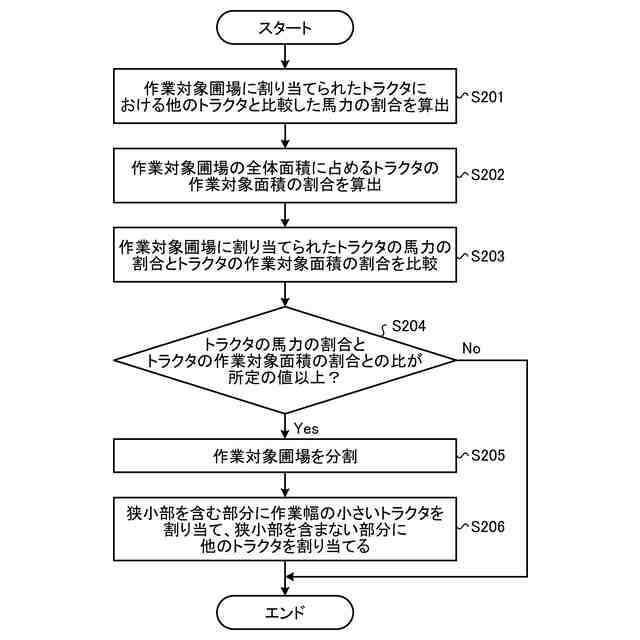
前記作業車両データおよび前記圃場データから、作業対象の前記圃場に割り当てられた前記作業幅の小さい前記作業車両の他の前記作業車両と比較した馬力の割合と、作業対象の前記圃場の全体面積に占める前記作業幅の小さい前記作業車両の作業対象面積の割合との比が所定の値以上である場合に作業対象の前記圃場を分割し、分割した前記圃場のうち前記狭小部を含まない部分を他の前記作業車両に割り当てる
ことを特徴とする請求項3に記載の作業車両の管理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両の管理システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、複数の作業車両の作業幅などの作業能力と複数の作業候補地(圃場)とを記憶し、作業車両の作業能力に基づいて作業候補地の中から優先する圃場を抽出して当該作業車両へ作業を行う圃場の位置情報を送信する作業車両の管理システムが知られている(たとえば、特許文献1参照)。
【0003】
また、このような作業車両の管理システムでは、複数の作業車両が作業を終了している場合には、作業能力の大きい作業車両へ優先して地図情報(作業を行う圃場の位置情報)を送信する。
【先行技術文献】
【特許文献】
【0004】
特開平11-203523号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記したような従来の作業車両の管理システムでは、作業能力の大きい作業車両を優先することで作業の効率化を図ることができるものの、作業能力の大きい作業車両は車体も大きく、圃場の形状によっては、耕耘残し(残耕という)が発生することがある。具体的には、圃場に車体の大きな作業車両が作業できないような狭い部分(狭小部)が存在するような場合には、残耕が発生することがある。
【0006】
すなわち、上記したような従来の作業車両の管理システムは、圃場の形状に適した作業計画を立案する点について改善の余地があった。
【0007】
本発明は、上記に鑑みてなされたものであって、圃場の形状に適した作業計画を立案することができる作業車両の管理システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両の管理システム(1)は、自動走行しながら圃場(F)で作業を行う作業車両(10)と、複数の前記圃場(F)に関するデータであり前記圃場(F)の形状情報を含む圃場データと、複数の前記作業車両(10)に関するデータであり前記作業車両(10)の作業幅情報を含む作業車両データとを有し、前記圃場データおよび前記作業車両データに基づいて、作業対象の前記圃場(F)に対応する前記作業車両(10)を当該圃場(F)へ差し向ける制御手段(40)とを備え、前記制御手段(40)は、前記圃場データから、前記圃場(F)に狭小部(F
S
)が存在する場合には該狭小部(F
S
)の狭小度合いに応じて該狭小部(F
S
)のランク付けを行い、前記作業車両データから、前記作業車両(10)の作業幅(W
W
)に応じて該作業幅(W
W
)のランク付けを行い、前記狭小部(F
S
)のランクおよび前記作業幅(W
W
)のランクを対応させて、前記圃場(F)に前記作業車両(10)を割り当てることを特徴とする。
【発明の効果】
【0009】
実施形態に係る作業車両の管理システムによれば、圃場の形状に適した作業計画を立案することができる。
【図面の簡単な説明】
【0010】
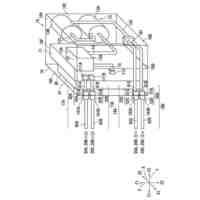
図1は、実施形態に係る作業車両の管理システムの概要説明図である。
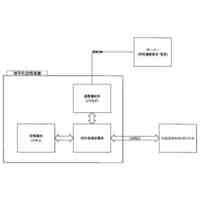
図2は、実施形態に係る作業車両の管理システムの機能を示すブロック図である。
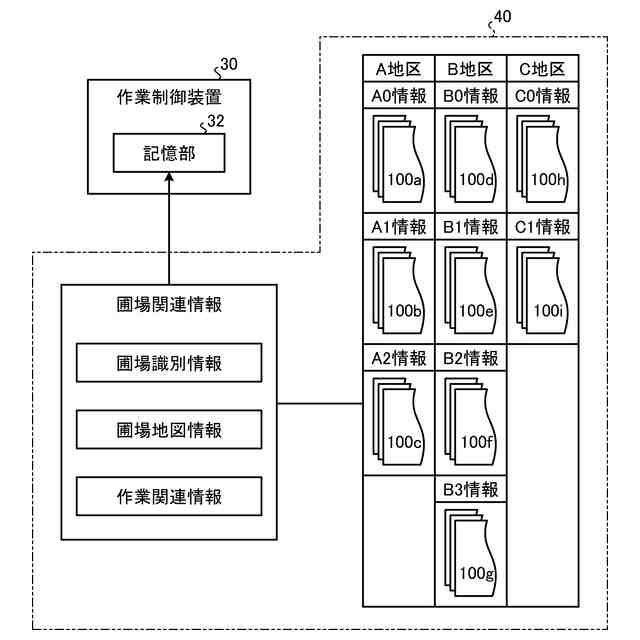
図3は、作業制御装置および情報処理装置の概要説明図である。
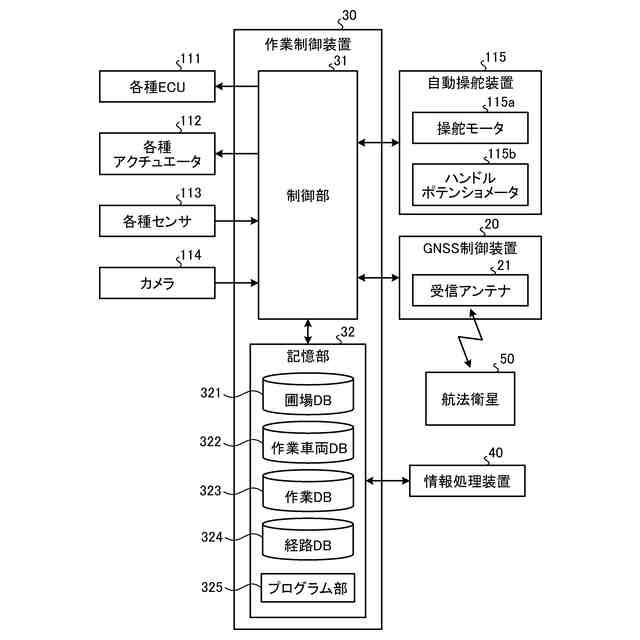
図4は、作業制御装置の機能を示すブロック図である。
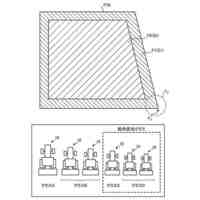
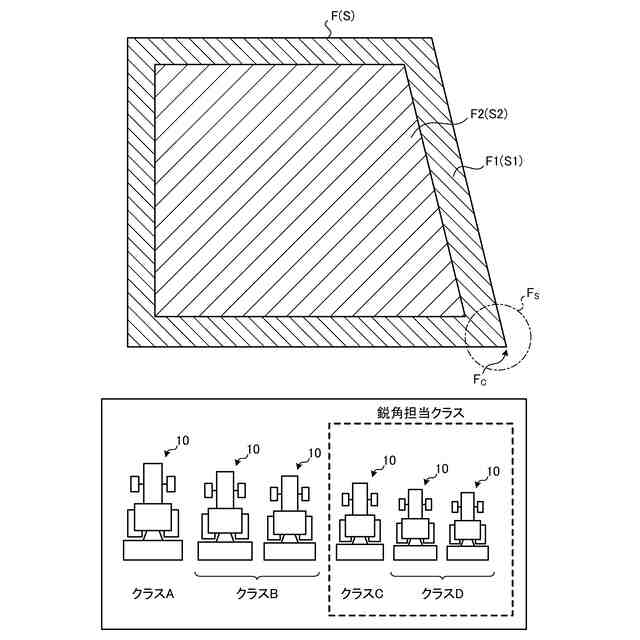
図5は、圃場の形状の説明図である。
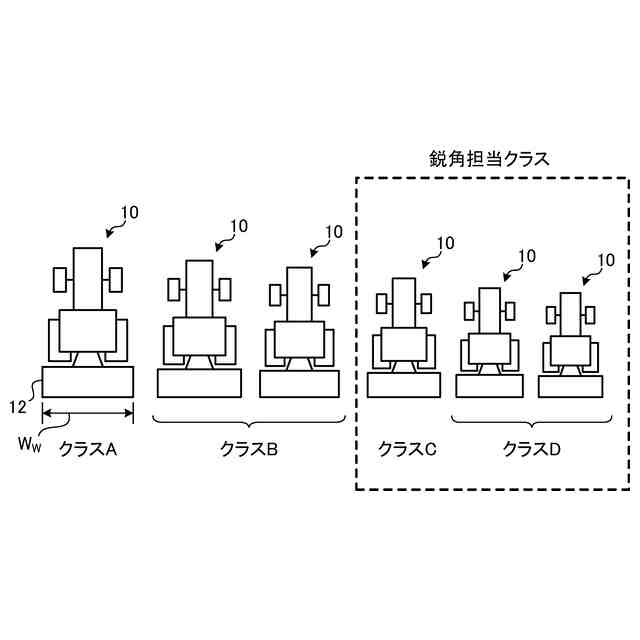
図6は、作業車両の作業幅のランクの説明図である。
図7は、作業対象の圃場に作業車両を割り当てる場合の一例を示す図である。
図8は、作業車両の割り当て制御(その1)の処理手順の一例を示すフローチャートである。
図9は、作業車両の割り当て制御(その2)の処理手順の一例を示すフローチャートである。
図10は、圃場の角部の説明図(その1)である。
図11は、作業対象の圃場に作業車両を割り当てる場合の変形例を示す図である。
図12は、圃場の角部の説明図(その2)である。
図13は、圃場の角部が曲線形状の場合の鋭角判定の説明図である。
図14は、狭小部が存在する圃場の分割の説明図である。
図15は、圃場における作業計画(その1)の説明図である。
図16は、圃場における作業計画(その2)の説明図である。
図17は、圃場における作業計画(その3)の説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
苗移植機
1日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
洗米装置
22日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
エンジン
15日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
コンバイン
18日前
井関農機株式会社
コンバイン
22日前
井関農機株式会社
歩行型管理機
9日前
井関農機株式会社
歩行型管理機
9日前
井関農機株式会社
収穫作業車両
18日前
井関農機株式会社
歩行型管理機
22日前
井関農機株式会社
歩行型管理機
23日前
井関農機株式会社
作業車両の管理システム
8日前
井関農機株式会社
圃場内作業車の自動制御装置
4日前
井関農機株式会社
洗米装置
7日前
個人
暗号化記憶媒体
1か月前
個人
環境情報処理装置
8日前
個人
求人支援システム
25日前
個人
外食予約システム
8日前
キヤノン電子株式会社
周辺機器
1か月前
個人
サービス提供システム
1日前
個人
海外在住支援システム
8日前
ニデック株式会社
冷却装置
2日前
個人
求人マッチングサーバ
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ