TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057361
公報種別
公開特許公報(A)
公開日
2024-04-24
出願番号
2022164052
出願日
2022-10-12
発明の名称
作業支援装置および作業支援方法
出願人
コベルコ建機株式会社
代理人
デロイトトーマツ弁理士法人
主分類
E02F
9/26 20060101AFI20240417BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械を構成する作業機構と当該作業機械の周辺に存在する対象物体との位置関係のオペレータによる認識精度の向上を図りうるシステム等を提供する。
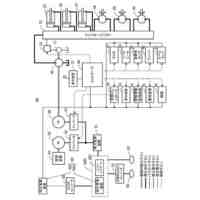
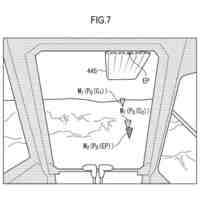
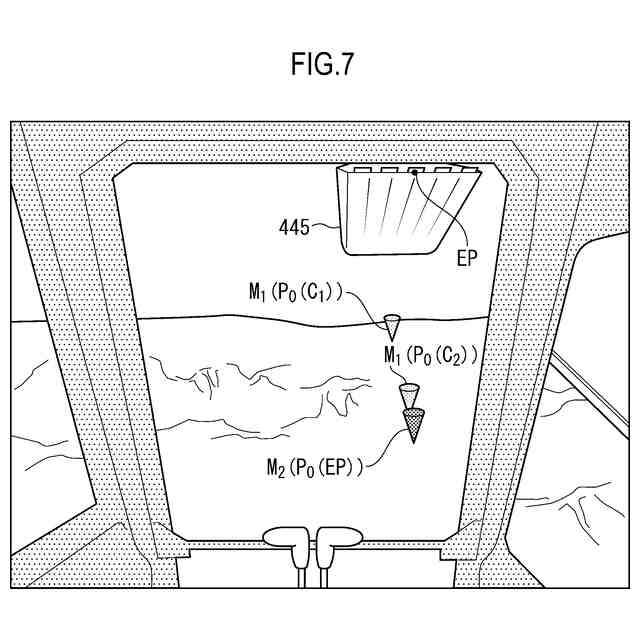
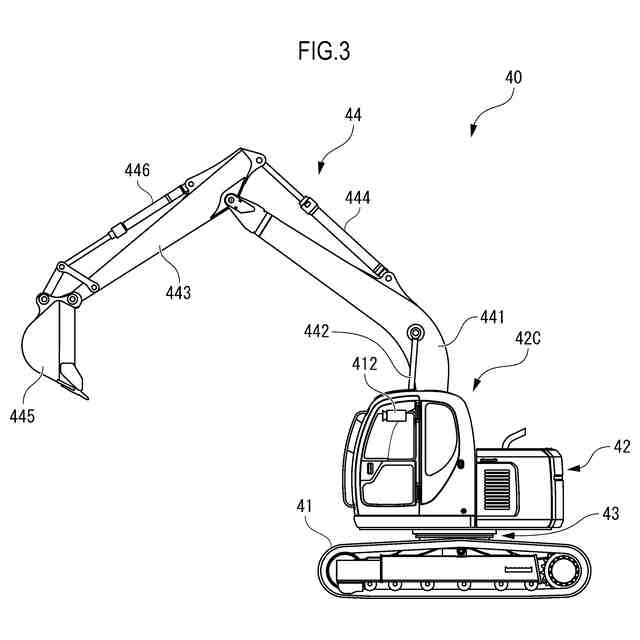
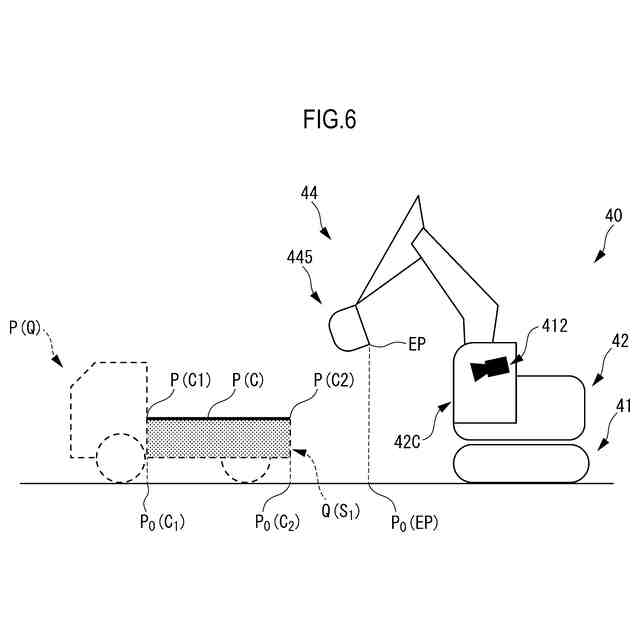
【解決手段】作業環境画像に第1指標画像および第2指標画像が重畳された作業支援画像が生成される。「作業環境画像」は、作業機械40の第1位置姿勢状態に応じて実機撮像装置412を通じて取得された第1エリア(例えば、上部旋回体42の前方)の状況を表わす画像である。「第1指標画像」は、作業機械40が第1位置姿勢状態からこれとは異なる第2位置姿勢状態に遷移する場合、作業環境画像に映り込むと予測される、当該第2位置姿勢状態に応じた第2エリア(例えば、上部旋回体42の側方および/または後方)に存在する指定物体(例えば、荷物積載車両Q)の空間占有態様を表わす画像である。
【選択図】図7
特許請求の範囲
【請求項1】
作業機械の第1位置姿勢状態に応じて撮像装置を通じて取得された第1エリアの状況を表わす作業環境画像に、前記作業機械が前記第1位置姿勢状態からこれとは異なる第2位置姿勢状態に遷移する場合に前記作業環境画像に映り込むと予測される、前記第2位置姿勢状態に応じた第2エリアに存在する指定物体の空間占有態様を表わす第1指標画像が重畳された作業支援画像を生成する
作業支援装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の作業支援装置において、
前記作業機械において下部走行体に対して上部旋回体が旋回することにより相互に異なる第1方位および第2方位のそれぞれを向いている状態を前記第1位置姿勢状態および前記第2位置姿勢状態のそれぞれとして前記作業支援画像を生成する
作業支援装置。
【請求項3】
請求項2に記載の作業支援装置において、
前記作業機械において前記上部旋回体から延在している作業機構の空間占有態様を表わす第2指標画像が含まれている前記作業支援画像を生成する
作業支援装置。
【請求項4】
請求項3に記載の作業支援装置において、
前記指定物体の輪郭の少なくとも一部を表わすまたは指す前記第1指標画像と、前記作業機構の輪郭の少なくとも一部を表わすまたは指す前記第2指標画像と、が含まれている前記作業支援画像を生成する
作業支援装置。
【請求項5】
請求項4に記載の作業支援装置において、
前記指定物体の指定エリアの境界線の少なくとも一部を表わすまたは指す前記第1指標画像と、前記指定物体の指定エリアの境界線を含む指定平面に対する前記作業機構の投影結果の境界線の少なくとも一部を表わすまたは指す前記第2指標画像と、が含まれている前記作業支援画像を生成する
作業支援装置。
【請求項6】
請求項5に記載の作業支援装置において、
前記第1指標画像が前記指定物体の指定エリアの境界線の少なくとも一部と地表との鉛直距離をさらに表わし、これに加えてまたは代えて、前記第2指標画像が前記指定平面と前記作業機構との鉛直距離を表わすような前記作業支援画像を生成する
作業支援装置。
【請求項7】
請求項3~6のうちいずれか1項に記載の作業支援装置において、
前記指定物体の空間占有態様と前記作業機構の空間占有態様との相対関係の相違に応じて、前記第1指標画像および前記第2指標画像のうち少なくとも一方の指標画像の意匠が相違する前記作業支援画像を生成する
作業支援装置。
【請求項8】
請求項1に記載の作業支援装置において、
前記作業機械の前記第1位置姿勢状態および前記第2位置姿勢状態を仮想的に一致させるまたは接近させる過程における前記指定物体の空間占有態様の遷移態様を表わす前記第1指標画像が前記作業環境画像に重畳された前記作業支援画像を生成する
作業支援装置。
【請求項9】
請求項1に記載の作業支援装置において、
前記第1位置姿勢状態および前記第2位置姿勢状態の乖離度が閾値を超えている場合、出力インターフェースに前記作業支援画像を出力させる一方、前記第1位置姿勢状態および前記第2位置姿勢状態の乖離度が前記閾値以下である場合、前記出力インターフェースに前記作業環境画像を出力させ、かつ、前記第1指標画像を出力させないための処理を実行する
作業支援装置。
【請求項10】
請求項1に記載の作業支援装置において、
前記作業機械が前記第2位置姿勢状態にある際に前記撮像装置または測距センサを用いて前記指定物体の空間占有態様を認識する
作業支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、オペレータにより操作される油圧ショベル等の作業機械の作業を支援するための技術に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
作業機の姿勢を用いて得られた作業具の位置の情報と、距離検出装置が求めた作業機械の作業対象までの距離の情報から得られた作業対象である地面の位置の情報とを用いて、作業具と対向する作業対象の表面に沿って当該作業具に対応する部分の画像を生成し、撮像装置によって撮像された作業対象の画像と合成して、表示装置に表示させる技術が提案されている(例えば、特許文献1参照)。これにより、作業具を有する作業機を備えた作業機械を用いて作業する際の作業効率の低下が抑制される。
【先行技術文献】
【特許文献】
【0003】
特許第6777375号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、作業機械において下部走行体に対して旋回可能な上部旋回体の前方の状況を表わす作業環境画像には映り込んでいないものの、当該作業機械の周囲には作業機械による作業等の観点から注目されるべき指定物体が存在する場合がある。この場合、下部走行体に対して上部旋回体が旋回することにより、指定物体が当該上部旋回体の前方に現われ、かつ、作業環境画像に映り込むことになるものの、オペレータとしてはその段階で当該指定物体の位置および姿勢を含む空間占有態様を初めて認識、作業機械の動作を調整等することになる。これにより、作業機械による作業効率が低下する可能性がある。
【0005】
そこで、本発明は、作業機械の周囲の状況を表わす作業環境画像に現れていないものの、作業機械の周辺に存在している指定物体の空間占有態様の認識精度の向上を図りうるシステム等を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の作業支援装置は、
作業機械の第1位置姿勢状態に応じて撮像装置を通じて取得された第1エリアの状況を表わす作業環境画像に、前記作業機械が前記第1位置姿勢状態からこれとは異なる第2位置姿勢状態に遷移する場合に前記作業環境画像に映り込むと予測される、前記第2位置姿勢状態に応じた第2エリアに存在する指定物体の空間占有態様を表わす第1指標画像が重畳された作業支援画像を生成する。
【0007】
当該構成の作業支援装置によれば、作業環境画像に第1指標画像が重畳された作業支援画像が生成される。「作業環境画像」は、作業機械の第1位置姿勢状態に応じて撮像装置を通じて取得された第1エリアの状況を表わす画像である。「第1指標画像」は、作業装置が第1位置姿勢状態からこれとは異なる第2位置姿勢状態に遷移する場合、作業環境画像に映り込むと予測される、当該第2位置姿勢状態に応じた第2エリアに存在する指定物体の空間占有態様を表わす画像である。
【0008】
「位置姿勢状態」とは、作業機械の指定箇所の位置および姿勢により特定される状態を意味する。物体の「空間占有態様」は、例えば、当該物体が実空間および/または仮想空間において占有する空間を構成する少なくとも一部の点群の座標値により特定される。
【0009】
このため、作業機械が第1位置姿勢状態にある際には作業環境画像に映り込んでいない(または部分的に映り込んでいるものの位置姿勢が不明確である)ものの、作業機械が第2位置姿勢状態に遷移する際に作業環境画像に映り込むと予測される指定物体の空間占有態様を、作業支援画像に接したオペレータ等に認識させることができる。
【0010】
前記構成の作業支援装置において、
前記作業機械において下部走行体に対して上部旋回体が旋回することにより相互に異なる第1方位および第2方位のそれぞれを向いている状態を前記第1位置姿勢状態および前記第2位置姿勢状態のそれぞれとして前記作業支援画像を生成する
ことが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
協和工業株式会社
除塵システム
1日前
住友建機株式会社
電動ショベル
14日前
日鉄建材株式会社
斜面安定化構造
15日前
ヤンマーホールディングス株式会社
作業車両
2日前
住友重機械工業株式会社
ショベル
14日前
個人
丸太等の柱断面にU字型工作物を付設する柱
8日前
ヤマハ化工建設株式会社
オープンケーソン工法
今日
住友建機株式会社
電動ショベル及びプログラム
14日前
株式会社ケー・エフ・シー
注入薬液移送システム
14日前
個人
地質試料採取方法
2日前
住友重機械工業株式会社
作業機械の制御装置
2日前
調和工業株式会社
振動補助装置及び施工方法
9日前
日立建機株式会社
建設機械
15日前
五洋建設株式会社
洗掘防止構造及びその構築方法
14日前
株式会社安藤・間
杭の応力算定モデルの設定方法
7日前
株式会社竹内製作所
作業用車両
2日前
株式会社竹内製作所
作業用車両
2日前
株式会社竹内製作所
作業用車両
2日前
株式会社竹内製作所
作業用車両
2日前
住友重機械工業株式会社
ショベル及びショベルの制御装置
14日前
株式会社竹内製作所
作業用車両
2日前
ヤンマーホールディングス株式会社
作業機械
7日前
株式会社カテックス
インサート構造体及び地山補強工法
9日前
五洋建設株式会社
鋼製筒状体の傾斜計測装置及び傾斜角計測方法
14日前
株式会社大林組
貫入抵抗低減装置及びサクション構造体の貫入方法
14日前
株式会社小松製作所
キャブおよび作業車両
7日前
ヤンマーホールディングス株式会社
電動式作業機械
2日前
株式会社小松製作所
作業機械および作業機械の制御方法
14日前
株式会社イビコン
ブロック、及び底部部品
2日前
株式会社小松製作所
作業機械および作業機械の制御方法
14日前
大和ハウス工業株式会社
型枠ユニット
8日前
コベルコ建機株式会社
作業支援装置および作業支援方法
15日前
住友建機株式会社
ショベル
8日前
豊国工業株式会社
水門開閉装置のロープ長さ調整装置
14日前
株式会社ミゾタ
ロータリーレーキ式除塵機
2日前
ライト工業株式会社
法枠の3次元点群データ処理システム
今日
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ