TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152983
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055204
出願日
2024-03-29
発明の名称
ロボット管理装置、ロボット、及びプログラム
出願人
フジテック株式会社
代理人
弁理士法人 楓国際特許事務所
主分類
G05D
1/435 20240101AFI20251002BHJP(制御;調整)
要約
【課題】利用者とロボットとが乗りかごに同乗する場合に生じ得る利用者の乗車時間の長期化を緩和できるようにする。
【解決手段】ロボット管理装置は、エレベータが設置された建物内で利用されるロボットを管理する装置であり、エレベータの乗りかごを利用してロボットを乗車階から目的階まで移動させる場合において、当該ロボットについてのかご呼びとして、そのロボットの目的階を行先階とするかご呼びの登録がエレベータの制御装置にて行われた後、キャンセル信号を当該制御装置へ送信することにより、その制御装置に、ロボットについてのかご呼びの登録をキャンセルさせることが可能である。
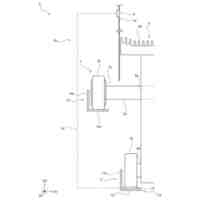
【選択図】図1
特許請求の範囲
【請求項1】
エレベータが設置された建物内で利用されるロボットを管理する装置であり、
前記エレベータの乗りかごを利用して前記ロボットを乗車階から目的階まで移動させる場合において、当該ロボットについてのかご呼びとして、そのロボットの目的階を行先階とするかご呼びの登録が前記エレベータの制御装置にて行われた後、キャンセル信号を当該制御装置へ送信することにより、その制御装置に、前記ロボットについてのかご呼びの登録をキャンセルさせることが可能な、ロボット管理装置。
続きを表示(約 2,900 文字)
【請求項2】
前記ロボットの目的階を行先階とするかご呼びの登録が前記エレベータの制御装置にて行われた後、その目的階への前記乗りかごの停止が確定するまでの期間を所定期間として、その所定期間において、
(1)前記エレベータの制御装置にて利用者についてのかご呼びの登録が行われているという条件、
が満たされているか否かを判断し、
前記条件(1)が満たされていると判断した場合には、更に、
(2)前記乗りかごが、前記ロボットの目的階への到着後に、前記利用者についてのかご呼びが示す行先階に停止するという条件、
が満たされているか否かを判断し、
前記所定期間内で前記条件(2)が満たされていると判断した場合に、前記キャンセル信号を前記エレベータの制御装置へ送信する、請求項1に記載のロボット管理装置。
【請求項3】
前記ロボットの乗車階から目的階へ向かう方向を順方向とした上で、前記キャンセル信号を前記エレベータの制御装置へ送信する場合には、当該キャンセル信号の送信前又は送信後に、新たに、前記ロボットについての乗場呼びの割当依頼として、当該ロボットの目的階に対して前記順方向に位置する端階を出発階とし、且つ、そのロボットの目的階を行先階とする乗場呼びの割当依頼を、前記エレベータの制御装置に対して行う、請求項1又は2に記載のロボット管理装置。
【請求項4】
前記ロボットについての乗場呼びの割当依頼を、その乗場呼びの割当てに必要な出発階及び行先階を前記エレベータの制御装置へ送信することで行う、請求項3に記載のロボット管理装置であり、
前記乗りかごが停止階に到着したときに、
その乗りかごの到着階が、前記割当依頼で送信した前記出発階の何れかに一致するか否かの判断(A1)を行い、
判断(A1)にて前記出発階の何れかに一致すると判断した場合、一致した割当依頼を第1着目依頼として、その第1着目依頼で送信した前記出発階及び前記行先階を用いて、その出発階から行先階へ向かう方向を前記ロボットの搬送方向とした上で、前記到着階からの前記乗りかごの出発方向が、その搬送方向に一致するか否かの判断(B1)を行い、
前記判断(B1)にて前記ロボットの搬送方向に一致すると判断した場合、前記第1着目依頼で送信した出発階が前記ロボットの乗車階に一致するか否かの判断(C1)を行い、
前記判断(C1)にて前記ロボットの乗車階に一致すると判断した場合には、戸開延長信号を前記エレベータの制御装置へ送信すると共に、前記乗りかごへの乗車を当該ロボットに指令し、その後、そのロボットの乗車が完了したときに乗車完了信号を前記エレベータの制御装置へ送信し、
前記判断(C1)にて前記ロボットの乗車階に一致しないと判断した場合には、前記戸開延長信号を前記エレベータの制御装置へ送信することなく、また、前記乗りかごへの乗車を前記ロボットに指令することなく、前記乗車完了信号をダミー信号として前記エレベータの制御装置へ送信する、ロボット管理装置。
【請求項5】
前記ロボットの乗車階から目的階へ向かう方向を順方向とした上で、前記キャンセル信号を前記エレベータの制御装置へ送信する場合には、当該キャンセル信号の送信前又は送信後に、新たに、前記ロボットについての乗場呼びの割当依頼として、当該ロボットの目的階を出発階とし、且つ、その目的階から前記順方向とは逆方向へ前記乗りかごを出発させる乗場呼びの割当依頼を、前記エレベータの制御装置に対して行う、請求項1又は2に記載のロボット管理装置。
【請求項6】
前記ロボットについての前記乗場呼びの割当依頼として、当該ロボットの目的階を出発階とし、且つ、その目的階に対して前記順方向とは逆方向に位置する端階を行先階とする乗場呼びの割当依頼を行う、請求項5に記載のロボット管理装置。
【請求項7】
前記ロボットについての前記乗場呼びの割当依頼として、当該ロボットの目的階を出発階とし、且つ、前記順方向とは逆方向を当該出発階からの行先方向とする乗場呼びの割当依頼を行う、請求項5に記載のロボット管理装置。
【請求項8】
前記ロボットについての乗場呼びの割当依頼を、その乗場呼びの割当てに必要な出発階と行先階又は行先方向とを前記エレベータの制御装置へ送信することで行う、請求項3に記載のロボット管理装置であり、
前記乗りかごが停止階に到着したときに、
その乗りかごの到着階が、前記割当依頼で送信した前記出発階の何れかに一致するか否かの判断(A1)を行い、
判断(A1)にて前記出発階の何れかに一致すると判断した場合、一致した割当依頼を第1着目依頼として、その第1着目依頼で送信した前記出発階と前記行先階、又は前記行先方向を用いて、その出発階から行先階へ向かう方向又はその行先方向を前記ロボットの搬送方向とした上で、前記到着階からの前記乗りかごの出発方向が、その搬送方向に一致するか否かの判断(B1)を行い、
前記判断(B1)にて前記ロボットの搬送方向に一致すると判断した場合、前記第1着目依頼で送信した出発階が、前記ロボットの乗車階と目的階のどちらに一致するのかの判断(C1)を行い、
前記判断(C1)にて前記ロボットの乗車階に一致すると判断した場合には、戸開延長信号を前記エレベータの制御装置へ送信すると共に、前記乗りかごへの乗車を当該ロボットに指令し、その後、そのロボットの乗車が完了したときに乗車完了信号を前記エレベータの制御装置へ送信し、
前記判断(C1)にて前記ロボットの目的階に一致すると判断した場合には、前記戸開延長信号を前記エレベータの制御装置へ送信すると共に、前記乗りかごからの降車を当該ロボットに指令し、その後、そのロボットの降車が完了したときに、前記乗車完了信号をダミー信号として前記エレベータの制御装置へ送信する、ロボット管理装置。
【請求項9】
前記ロボットの乗車階から目的階へ向かう方向を順方向とした上で、前記キャンセル信号を前記エレベータの制御装置へ送信した後、前記乗りかごの移動方向が前記順方向から逆方向へ反転した場合に、そのロボットの目的階を行先階とするかご呼びの再登録を前記エレベータの制御装置に依頼する、請求項1又は2に記載のロボット管理装置。
【請求項10】
エレベータが設置された建物内で利用されるロボットであり、
自身が前記エレベータの乗りかごを利用して乗車階から目的階まで移動する場合において、自身についてのかご呼びとして、自身の目的階を行先階とするかご呼びの登録が前記エレベータの制御装置にて行われた後、キャンセル信号を当該制御装置へ送信することにより、その制御装置に、自身についてのかご呼びの登録をキャンセルさせることが可能な、ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、エレベータを利用するロボットの制御技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、建物内での様々な作業(掃除、監視、搬送など)にロボットが活用されることが多くなってきている(例えば、特許文献1参照)。それに伴い、建物内におけるロボットの階間移動にエレベータが利用されることが増えてきており、利用者とロボットの両方がエレベータを利用するケースが増えてきている。
【先行技術文献】
【特許文献】
【0003】
特許第7380793号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一方、ロボットは、利用者に比して乗降に時間を要する。このため、利用者と共にロボットがエレベータを利用する環境下において、利用者の搬送中に途中の階でロボットが乗車してくる場合や、利用者の搬送中に途中の階でロボットが降車していく場合には、利用者は、ロボットの乗降が完了するまで乗りかご内で待たされることになる。このように、利用者とロボットとが乗りかごに同乗する場合には、利用者は、自身の行先階に到着するまでの乗車時間が長期化することを強いられるおそれがある。
【0005】
そこで本発明の目的は、利用者とロボットとが乗りかごに同乗する場合に生じ得る利用者の乗車時間の長期化を緩和できるようにすることである。
【課題を解決するための手段】
【0006】
本発明に係るロボット管理装置は、エレベータが設置された建物内で利用されるロボットを管理する装置であり、エレベータの乗りかごを利用してロボットを乗車階から目的階まで移動させる場合において、当該ロボットについてのかご呼びとして、そのロボットの目的階を行先階とするかご呼びの登録がエレベータの制御装置にて行われた後、キャンセル信号を当該制御装置へ送信することにより、その制御装置に、ロボットについてのかご呼びの登録をキャンセルさせることが可能である(態様1)。
【0007】
上記態様1によれば、ロボットについてのかご呼びへの応答がそのまま実行されたとすると、利用者が、乗りかごでの移動中に、自身が降車するまでの途中の階でロボットが降車していくことを経験しなければならない、といった状況になること、又は、そのような状況になり得ることが判明した時点で、エレベータの制御装置に、ロボットについてのかご呼びの登録をキャンセルさせることが可能になる。そして、そのようなキャンセルにより、乗りかごを、そこにロボットを乗車させたまま当該ロボットの目的階を通過させることが可能になる。これにより、利用者は、乗りかごでの移動中にロボットが降車していくことを経験しなくてよくなる。その結果として、利用者の乗車時間の長期化を緩和することが可能になる。
【0008】
上記態様1に係るロボット管理装置は、次のような構成を備えていてもよい(態様2)。ロボット管理装置は、ロボットの目的階を行先階とするかご呼びの登録がエレベータの制御装置にて行われた後、その目的階への乗りかごの停止が確定するまでの期間を所定期間として、その所定期間において、(1)エレベータの制御装置にて利用者についてのかご呼びの登録が行われているという条件、が満たされているか否かを判断してもよい。そして、ロボット管理装置は、条件(1)が満たされていると判断した場合には、更に、(2)乗りかごが、ロボットの目的階への到着後に、利用者についてのかご呼びが示す行先階に停止するという条件、が満たされているか否かを判断し、その条件(2)が満たされていると所定期間内で判断した場合に、キャンセル信号をエレベータの制御装置へ送信してもよい。
【0009】
条件(1)及び(2)が何れも満たされた場合には、ロボットについてのかご呼びへの応答がそのまま実行されたとすると、乗車中の利用者が、必ず、自身が降車するまでの途中の階でロボットが降車していくことを経験しなければならなくなる。そこで、上記態様2によれば、所定期間内で条件(1)及び(2)が何れも満たされた場合に、利用者が、乗りかごでの移動中にロボットが降車していくことを経験しなくてよくなるようにするべく、そのための処理の1つとして、エレベータの制御装置に、ロボットについてのかご呼びの登録をキャンセルさせることが可能になる。そして、そのようなキャンセルにより、乗りかごを、そこにロボットを乗車させたまま当該ロボットの目的階を通過させることが可能になる。その結果として、利用者の乗車時間の長期化を緩和することが可能になる。
【0010】
上記態様1又は2に係るロボット管理装置は、ロボットの乗車階から目的階へ向かう方向を順方向とした上で、キャンセル信号をエレベータの制御装置へ送信する場合には、当該キャンセル信号の送信前又は送信後に、新たに、ロボットについての乗場呼びの割当依頼として、当該ロボットの目的階に対して順方向に位置する端階を出発階とし、且つ、そのロボットの目的階を行先階とする乗場呼びの割当依頼を、エレベータの制御装置に対して行ってもよい(態様3)。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
フジテック株式会社
乗客コンベア
1日前
フジテック株式会社
マンコンベヤ
1日前
フジテック株式会社
マンコンベヤ
17日前
フジテック株式会社
フック掛け器具
3日前
フジテック株式会社
マーカー設置治具
22日前
フジテック株式会社
マーカー設置治具
22日前
フジテック株式会社
情報提供システム
22日前
フジテック株式会社
ロボット管理装置、ロボット、及びプログラム
29日前
フジテック株式会社
表示装置、表示制御方法、および、表示制御プログラム
3日前
フジテック株式会社
表示装置、表示制御方法、および、表示制御プログラム
9日前
フジテック株式会社
マンコンベヤ、保守装置及びマンコンベヤのステップ取り外し方法
9日前
フジテック株式会社
施工参照情報生成装置、施工参照情報生成方法、および、施工参照情報生成プログラム
1日前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社FUJI
加工機械ライン
3か月前
株式会社熊谷組
障害物の検出方法
1か月前
愛知製鋼株式会社
車両用システム
2か月前
ローム株式会社
基準電圧源
2か月前
株式会社クボタ
作業車
9日前
個人
作業車両自動化システム
3か月前
新電元工業株式会社
作業用ロボット
29日前
豊田合成株式会社
機器制御装置
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
トヨタ自動車株式会社
生産管理システム
3か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
減圧弁
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
4か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
制御装置
1か月前
キヤノン株式会社
配送システム
2か月前
エイブリック株式会社
電流補償回路及び半導体装置
25日前
続きを見る
他の特許を見る











 特許ウォッチ
特許ウォッチ