TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152862
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055023
出願日
2024-03-28
発明の名称
進路予測装置、進路予測方法および進路予測プログラム
出願人
株式会社奥村組
代理人
弁理士法人翔和国際特許事務所
主分類
E21D
9/093 20060101AFI20251002BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】より精度高くシールド掘進機の進路を予測する進路予測装置、方法及びプログラムを提供する。
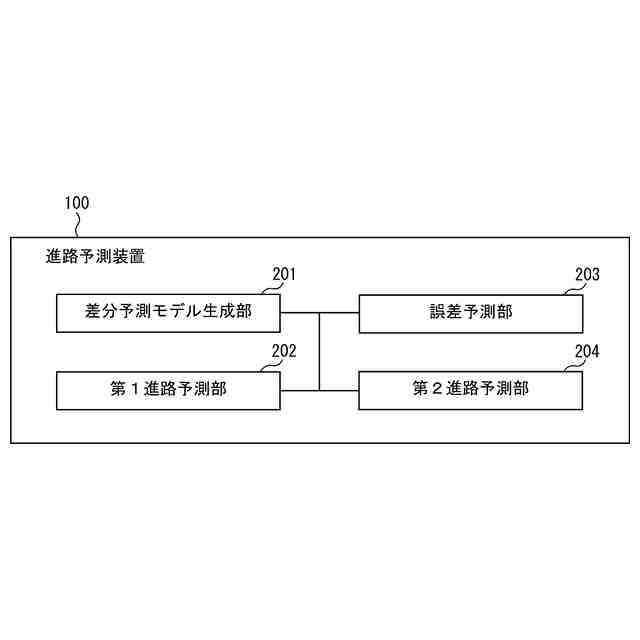
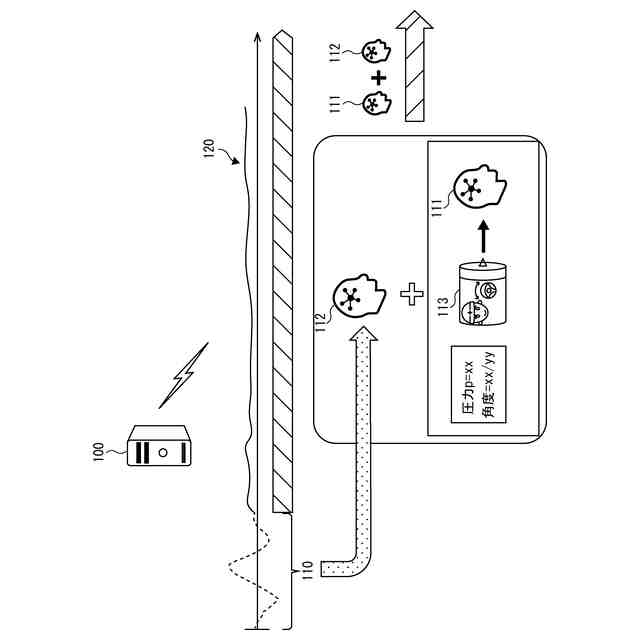
【解決手段】シールド掘進機の進路予測装置は、シールド掘進機の掘進開始後の学習区間において、シールド掘進機の進路を予測するために生成した基本モデルに基づいて、シールド掘進機が到達すると予測される基本モデル到達予測位置と、シールド掘進機の実際の到達位置との差分を、人工知能に機械学習させて学習済みの差分予測モデルを生成する差分予測モデル生成部、学習区間経過後の工事区間において、基本モデルを用いてシールド掘進機の先端位置および向きを予測する第1進路予測部、差分予測モデルを用いて予測されたシールド掘進機の先端位置及び向きの誤差を予測する誤差予測部及び誤差予測部により予測された誤差を第1進路予測部により予測されたシールド掘進機の進路に付加することでシールド掘進機の進路を予測する第2進路予測部を備える。
【選択図】図2
特許請求の範囲
【請求項1】
シールド掘進機の掘進開始後の任意の区間に設定された学習区間において、前記シールド掘進機の進路を予測させるために生成された基本モデルに基づいて、前記シールド掘進機を掘進させた場合に前記シールド掘進機が到達すると予測される基本モデル到達予測位置と、前記シールド掘進機の実際の到達位置と、の差分を人工知能に機械学習させて学習済みの差分予測モデルを生成する差分予測モデル生成部と、
前記学習区間を経過した後の工事区間において、前記基本モデルを用いて前記シールド掘進機の先端位置および向きを予測する第1進路予測部と、
前記差分予測モデルを用いて、前記基本モデルにより予測された前記シールド掘進機の先端位置および向きと、実際の掘進位置との差分から、予測された前記シールド掘進機の先端位置および向きの誤差を予測する誤差予測部と、
前記誤差予測部により予測された誤差を、前記第1進路予測部により予測された前記シールド掘進機の先端位置および向きに付加することで、前記シールド掘進機の進路を予測する第2進路予測部と、
を備える進路予測装置。
続きを表示(約 1,100 文字)
【請求項2】
前記差分予測モデル生成部は、前記学習区間において、前記シールド掘進機を掘進させるために入力されるパラメータのそれぞれについての重み付け係数をさらに人工知能に機械学習させて、前記学習済み差分予測モデルを生成する請求項1に記載の進路予測装置。
【請求項3】
シールド掘進機の掘進開始後の任意の区間に設定された学習区間において、前記シールド掘進機の進路を予測させるために生成された基本モデルに基づいて、前記シールド掘進機を掘進させた場合に前記シールド掘進機が到達すると予測される基本モデル到達予測位置と、前記シールド掘進機の実際の到達位置と、の差分を人工知能に機械学習させて学習済み差分予測モデルを生成する差分予測モデル生成ステップと、
前記学習区間を経過した後の工事区間において、前記基本モデルを用いて前記シールド掘進機の先端位置および向きを予測する第1進路予測ステップと、
前記学習済み差分予測モデルを用いて、前記基本モデルにより予測された前記シールド掘進機の先端位置および向きと、実際の掘進位置との差分から、予測された前記シールド掘進機の先端位置および向きの誤差を予測する誤差予測ステップと、
前記誤差予測ステップにおいて予測された誤差を、前記第1進路予測ステップにおいて予測された前記シールド掘進機の先端位置および向きに付加することで、前記シールド掘進機の進路を予測する第2進路予測ステップと、
を含む進路予測方法。
【請求項4】
シールド掘進機の掘進開始後の任意の区間に設定された学習区間において、前記シールド掘進機の進路を予測させるために生成された基本モデルに基づいて、前記シールド掘進機を掘進させた場合に前記シールド掘進機が到達すると予測される基本モデル到達予測位置と、前記シールド掘進機の実際の到達位置と、の差分を人工知能に機械学習させて学習済み差分予測モデルを生成する差分予測モデル生成ステップと、
前記学習区間を経過した後の工事区間において、前記基本モデルを用いて前記シールド掘進機の先端位置および向きを予測する第1進路予測ステップと、
前記学習済み差分予測モデルを用いて、前記基本モデルにより予測された前記シールド掘進機の先端位置および向きと、実際の掘進位置との差分から、予測された前記シールド掘進機の先端位置および向きの誤差を予測する誤差予測ステップと、
前記誤差予測ステップにおいて予測された誤差を、前記第1進路予測ステップにおいて予測された前記シールド掘進機の先端位置および向きに付加することで、前記シールド掘進機の進路を予測する第2進路予測ステップと、
をコンピュータに実行させる進路予測プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、進路予測装置、進路予測方法および進路予測プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
上記技術分野において、非特許文献1には、曲線を含む計画線形に対するシールド機の運転方法と、形状の異なる複数のセグメントの割り付け方法について、事前シミュレーションを行って、これらの計画値を設定することが開示されている。
【先行技術文献】
【非特許文献】
【0003】
AIを活用したシールド掘進計画支援システムを開発/企業情報/清水建設、2018年5月25日、〔2023年12月17日検索〕、インターネット(URL:https://www.shimz.co.jp/company/about/news-release/2018/2018005/html)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記非特許文献1に記載の技術では、より精度高くシールド掘進機の進路を予測することができなかった。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明に係る進路予測装置は、
シールド掘進機の掘進開始後の任意の区間に設定された学習区間において、前記シールド掘進機の進路を予測させるために生成された基本モデルに基づいて、前記シールド掘進機を掘進させた場合に前記シールド掘進機が到達すると予測される基本モデル到達予測位置と、前記シールド掘進機の実際の到達位置と、の差分を人工知能に機械学習させて学習済みの差分予測モデルを生成する差分予測モデル生成部と、
前記学習区間を経過した後の工事区間において、前記基本モデルを用いて前記シールド掘進機の先端位置および向きを予測する第1進路予測部と、
前記差分予測モデルを用いて、前記基本モデルにより予測された前記シールド掘進機の先端位置および向きと、実際の掘進位置との差分から、予測された前記シールド掘進機の先端位置および向きの誤差を予測する誤差予測部と、
前記誤差予測部により予測された誤差を、前記第1進路予測部により予測された前記シールド掘進機の先端位置および向きに付加することで、前記シールド掘進機の進路を予測する第2進路予測部と、
を備える。
【0006】
また、上記目的を達成するため、本発明に係る進路予測方法は、
シールド掘進機の掘進開始後の任意の区間に設定された学習区間において、前記シールド掘進機の進路を予測させるために生成された基本モデルに基づいて、前記シールド掘進機を掘進させた場合に前記シールド掘進機が到達すると予測される基本モデル到達予測位置と、前記シールド掘進機の実際の到達位置と、の差分を人工知能に機械学習させて学習済み差分予測モデルを生成する差分予測モデル生成ステップと、
前記学習区間を経過した後の工事区間において、前記基本モデルを用いて前記シールド掘進機の先端位置および向きを予測する第1進路予測ステップと、
前記学習済み差分予測モデルを用いて、前記基本モデルにより予測された前記シールド掘進機の先端位置および向きと、実際の掘進位置との差分から、予測された前記シールド掘進機の先端位置および向きの誤差を予測する誤差予測ステップと、
前記誤差予測ステップにおいて予測された誤差を、前記第1進路予測ステップにおいて予測された前記シールド掘進機の先端位置および向きに付加することで、前記シールド掘進機の進路を予測する第2進路予測ステップと、
を含む。
【0007】
さらに、上記目的を達成するため、本発明に係る進路予測プログラムは、
シールド掘進機の掘進開始後の任意の区間に設定された学習区間において、前記シールド掘進機の進路を予測させるために生成された基本モデルに基づいて、前記シールド掘進機を掘進させた場合に前記シールド掘進機が到達すると予測される基本モデル到達予測位置と、前記シールド掘進機の実際の到達位置と、の差分を人工知能に機械学習させて学習済み差分予測モデルを生成する差分予測モデル生成ステップと、
前記学習区間を経過した後の工事区間において、前記基本モデルを用いて前記シールド掘進機の先端位置および向きを予測する第1進路予測ステップと、
前記学習済み差分予測モデルを用いて、前記基本モデルにより予測された前記シールド掘進機の先端位置および向きと、実際の掘進位置との差分から、予測された前記シールド掘進機の先端位置および向きの誤差を予測する誤差予測ステップと、
前記誤差予測ステップにおいて予測された誤差を、前記第1進路予測ステップにおいて予測された前記シールド掘進機の先端位置および向きに付加することで、前記シールド掘進機の進路を予測する第2進路予測ステップと、
をコンピュータに実行させる。
【発明の効果】
【0008】
本発明によれば、より精度高くシールド掘進機の進路を予測することができる。
【図面の簡単な説明】
【0009】
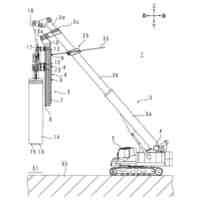
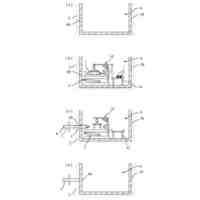
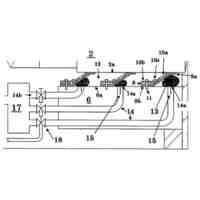
本発明の好ましい実施形態に係る進路予測装置の動作の概要を説明するための図である。
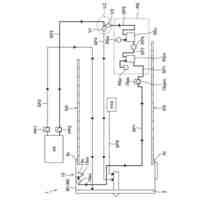
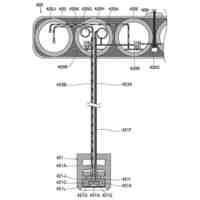
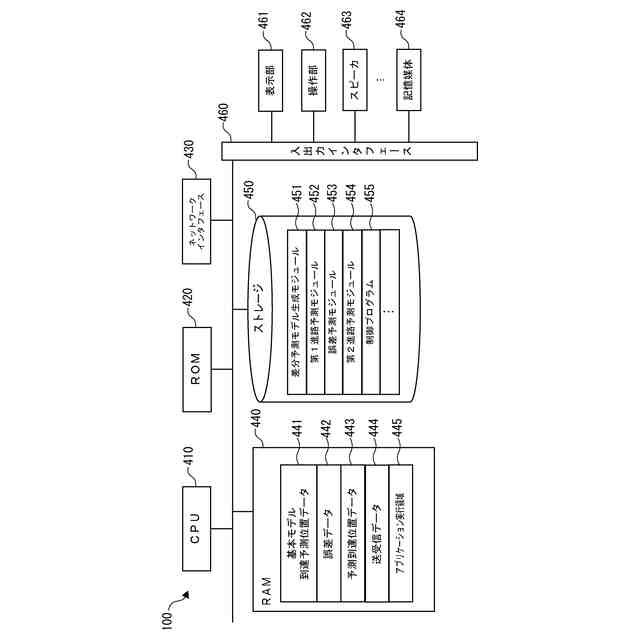
本発明の好ましい実施形態に係る進路予測装置の構成を説明するためのブロック図である。
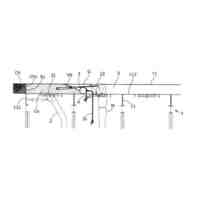
本発明の好ましい実施形態に係る進路予測装置のハードウェア構成を説明するための図である。
本発明の好ましい実施形態に係る進路予測装置の処理手順を説明するためのフローチャートである。
【発明を実施するための形態】
【0010】
以下に、本発明を実施するための形態について、図面を参照して、例示的に詳しく説明する。ただし、以下の実施形態に記載されている、構成、数値、処理の流れ、機能要素などは一例に過ぎず、その変形や変更は自由であって、本発明の技術範囲を以下の記載に限定する趣旨のものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社奥村組
継手部用スパイラル鉄筋
1か月前
個人
掘削機
5か月前
日特建設株式会社
切断装置
1か月前
株式会社奥村組
地山探査装置
3か月前
株式会社奥村組
地山探査方法
3か月前
株式会社奥村組
地山探査装置
3か月前
株式会社奥村組
地山探査装置
3か月前
株式会社笠原建設
横孔形成方法
7か月前
株式会社奥村組
シールド掘進機
6か月前
株式会社奥村組
シールド掘進機
2か月前
日特建設株式会社
削孔システム
14日前
花王株式会社
岩盤の掘削方法
5か月前
岐阜工業株式会社
トンネルセントル
2か月前
個人
掘削機、及び、資源回収システム
7か月前
株式会社奥村組
泥土圧シールド掘進機
6か月前
株式会社熊谷組
天井板撤去装置
7か月前
個人
オープンシールド機
3か月前
株式会社奥村組
セグメントの組立方法
2か月前
個人
オープンシールド機
3か月前
大阪瓦斯株式会社
牽引装置
6か月前
岐阜工業株式会社
コンクリート分配装置
27日前
個人
箱形ルーフおよびその施工法
2か月前
デンカ株式会社
静的破砕方法
3か月前
株式会社金澤製作所
発進坑口のエントランス装置
6か月前
個人
メタンハイドレート等海底鉱物資源の採取方法
4か月前
大阪瓦斯株式会社
切欠開裂治具
6か月前
地中空間開発株式会社
トンネル掘削機
1か月前
岐阜工業株式会社
トンネルセントルの妻板装置
3か月前
株式会社ケー・エフ・シー
トンネル水圧調整装置
2か月前
日鉄建材株式会社
構造物用補強リング及び構造物
2か月前
株式会社奥村組
地山探査装置に用いる地山保持材
3か月前
大成建設株式会社
トンネルとその施工方法
7か月前
戸田建設株式会社
掘削機切削部側壁
4か月前
株式会社ケー・エフ・シー
モルタル注入管理システム
7か月前
株式会社奥村組
先行ビットおよびそれを備える掘削機
3か月前
株式会社奥村組
先行ビットおよびそれを備える掘削機
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ