TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146134
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046758
出願日
2024-03-22
発明の名称
フォークリフトの制御装置および方法並びにフォークリフト
出願人
三菱重工業株式会社
,
国立大学法人神戸大学
代理人
弁理士法人酒井国際特許事務所
主分類
B66F
9/24 20060101AFI20250926BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】フォークリフトの制御装置および方法並びにフォークリフトにおいて、物品の積み下ろし作業および積み上げ作業の効率化を図る。
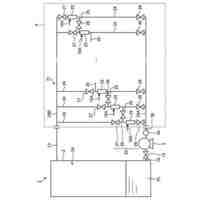
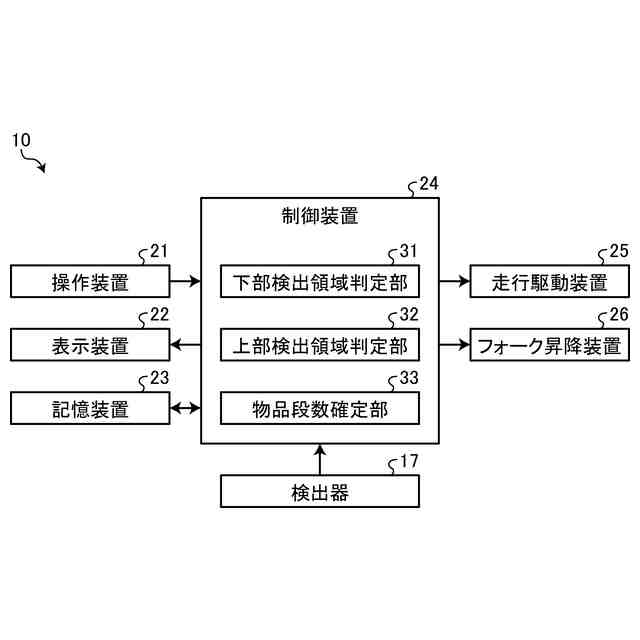
【解決手段】昇降可能なフォークを有すると共に、フォークに設けられてフォークの前方の領域を検出する検出器を有するフォークリフトの制御装置において、検出器の検出結果に基づいてフォークに対して前方に対向する第1検出領域における物品の有無を判定する第1検出領域判定部と、検出器の検出結果に基づいて第1検出領域より上方の第2検出領域における物品の有無を判定する第2検出領域判定部と、第1検出領域判定部と第2検出領域判定部の判定結果に基づいて積み上げられた物品の段数を確定する物品段数確定部と、を備える。
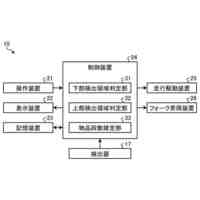
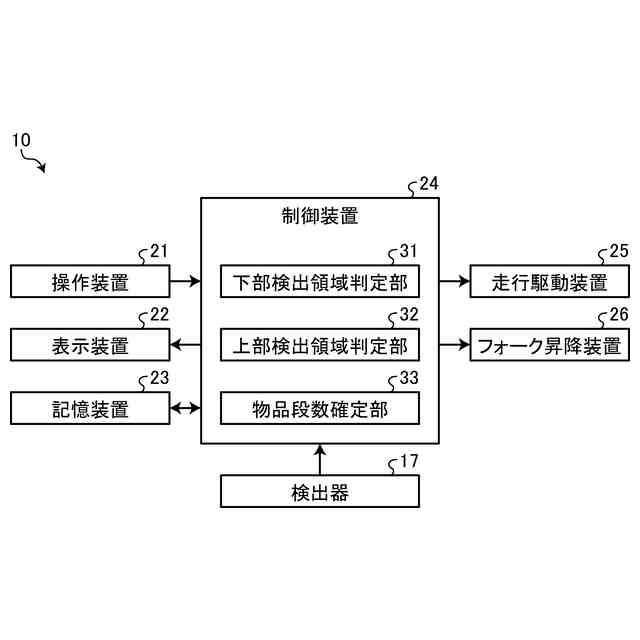
【選択図】図2
特許請求の範囲
【請求項1】
昇降可能なフォークを有すると共に、前記フォークに設けられて前記フォークの前方の領域を検出する検出器を有するフォークリフトの制御装置において、
前記検出器の検出結果に基づいて前記フォークに対して前方に対向する第1検出領域における物品の有無を判定する第1検出領域判定部と、
前記検出器の検出結果に基づいて前記第1検出領域より上方の第2検出領域における前記物品の有無を判定する第2検出領域判定部と、
前記第1検出領域判定部と前記第2検出領域判定部の判定結果に基づいて積み上げられた前記物品の段数を確定する物品段数確定部と、
を備えるフォークリフトの制御装置。
続きを表示(約 1,100 文字)
【請求項2】
入力された前記物品の荷物段数に基づいて、最上段の前記物品が前記第1検出領域に位置するように前記フォークを停止させた状態で、前記第1検出領域判定部および前記第2検出領域判定部が処理を実行する、
請求項1に記載のフォークリフトの制御装置。
【請求項3】
前記物品段数確定部は、前記第1検出領域に物品が有ると共に前記第2検出領域に前記物品が無いと、前記第1検出領域に有る物品が最上段であると判定する、
請求項1または請求項2に記載のフォークリフトの制御装置。
【請求項4】
前記第2検出領域判定部は、前記第2検出領域に前記物品が有ると判定すると、前記フォークを前記物品の高さ分だけ上昇させた後、前記第2検出領域における前記物品の有無を判定する、
請求項1に記載のフォークリフトの制御装置。
【請求項5】
前記第1検出領域判定部は、前記第1検出領域に前記物品が無いと判定すると、前記フォークを前記物品の高さ分だけ下降させた後、前記第1検出領域における前記物品の有無を判定する、
請求項1に記載のフォークリフトの制御装置。
【請求項6】
前記第2検出領域判定部は、前記第2検出領域に前記物品が有ると判定すると、前記フォークを上昇させながら前記第2検出領域における前記物品の有無を判定する、
請求項1に記載のフォークリフトの制御装置。
【請求項7】
前記第1検出領域判定部は、前記第1検出領域に前記物品が無いと判定すると、前記フォークを下降させながら、前記第1検出領域における前記物品の有無を判定する、
請求項1に記載のフォークリフトの制御装置。
【請求項8】
異なる高さの前記物品の積み上げデータの中から選択された前記物品の積み上げデータに基づいて処理を実行する、
請求項1に記載のフォークリフトの制御装置。
【請求項9】
昇降可能なフォークを有すると共に、前記フォークに設けられて前記フォークの前方の領域を検出する検出器を有するフォークリフトの制御方法において、
前記検出器の検出結果に基づいて前記フォークに対して前方に対向する第1検出領域における物品の有無を判定するステップと、
前記検出器の検出結果に基づいて前記第1検出領域より上方の第2検出領域における前記物品の有無を判定するステップと、
前記第1検出領域における物品の有無と前記第2検出領域における物品の有無に基づいて積み上げられた前記物品の段数を確定するステップと、
を有するフォークリフトの制御方法。
【請求項10】
請求項1に記載のフォークリフトの制御装置を備えるフォークリフト。
発明の詳細な説明
【技術分野】
【0001】
本開示は、フォークリフトの制御装置および方法並びにフォークリフトに関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
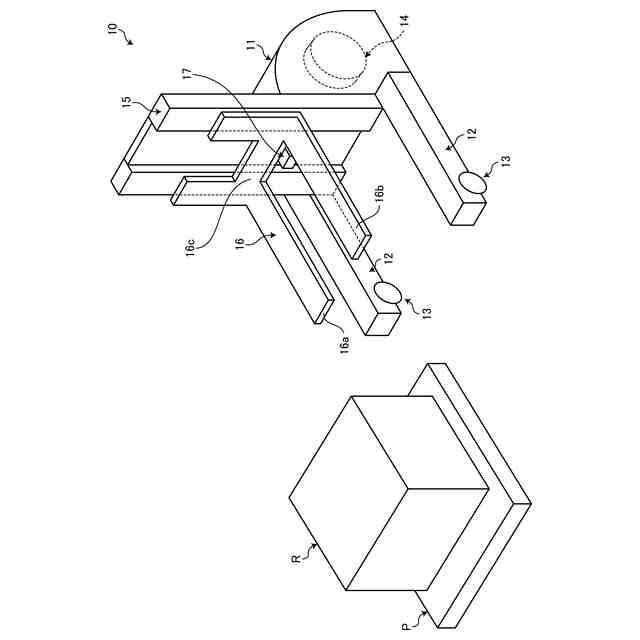
物品は、パレット上に載置されており、パレットは、例えば、保管庫の床に直接載置される。フォークリフトは、誘導線、壁や柱に配置された反射板、保管庫の内部の形状的な特徴をセンサで検出することによって走行し、保管庫に移動可能である。フォークリフトは、一対のフォークをパレットのポケットに挿入して上昇させることで物品を支持し、走行することで物品を搬送する。パレット上に載置された物品は、複数段にわたって積み上げられることがあり、この場合、フォークリフトは、最上段のパレット(物品)から順に支持して搬送する必要がある。このようなフォークリフトの制御装置として、例えば、特許文献1に記載されたものがある。
【先行技術文献】
【特許文献】
【0003】
特許第3772476号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
保管庫にて、パレット上に載置された物品が何段積み上げられているか不明な場合、事前に物品が積み上げられた段数を把握する必要がある。従来のフォークリフトは、フォークに検出器を設け、フォークの昇降時に検出器が物品の有無を検出することで、最上段の物品を検出し、物品が積み上げられた段数を把握する。ところが、検出器が物品の有無を検出するとき、フォークをゆっくりと昇降させる必要があり、物品が積み上げられた段数の把握に長時間を要してしまうという課題がある。
【0005】
本開示は、上述した課題を解決するものであり、物品の積み下ろし作業および積み上げ作業の効率化を図るフォークリフトの制御装置および方法並びにフォークリフトを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するための本開示のフォークリフトの制御装置は、昇降可能なフォークを有すると共に、前記フォークに設けられて前記フォークの前方の領域を検出する検出器を有するフォークリフトの制御装置において、前記検出器の検出結果に基づいて前記フォークに対して前方に対向する第1検出領域における物品の有無を判定する第1検出領域判定部と、前記検出器の検出結果に基づいて前記第1検出領域より上方の第2検出領域における前記物品の有無を判定する第2検出領域判定部と、前記第1検出領域判定部と前記第2検出領域判定部の判定結果に基づいて積み上げられた前記物品の段数を確定する物品段数確定部と、を備える。
【0007】
また、本開示のフォークリフトの制御方法は、昇降可能なフォークを有すると共に、前記フォークに設けられて前記フォークの前方の領域を検出する検出器を有するフォークリフトの制御方法において、前記検出器の検出結果に基づいて前記フォークに対して前方に対向する第1検出領域における物品の有無を判定するステップと、前記検出器の検出結果に基づいて前記第1検出領域より上方の第2検出領域における前記物品の有無を判定するステップと、前記第1検出領域における物品の有無と前記第2検出領域における物品の有無に基づいて積み上げられた前記物品の段数を確定するステップと、を有する。
【0008】
また、本開示のフォークリフトは、前記フォークリフトの制御装置を備える。
【発明の効果】
【0009】
本開示のフォークリフトの制御装置および方法並びにフォークリフトによれば、物品の積み下ろし作業および積み上げ作業の効率化を図ることができる。
【図面の簡単な説明】
【0010】
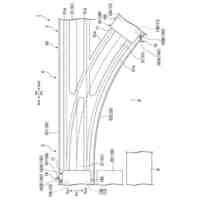
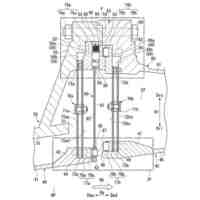
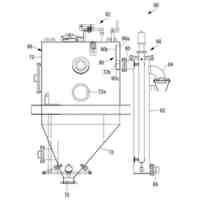
図1は、第1実施形態のフォークリフトを表す斜視図である。
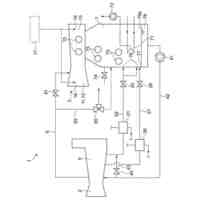
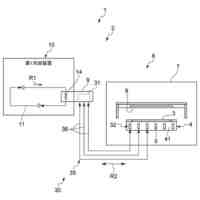
図2は、第1実施形態のフォークリフトの制御装置を表すブロック構成図である。
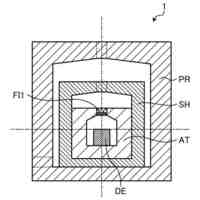
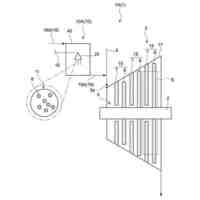
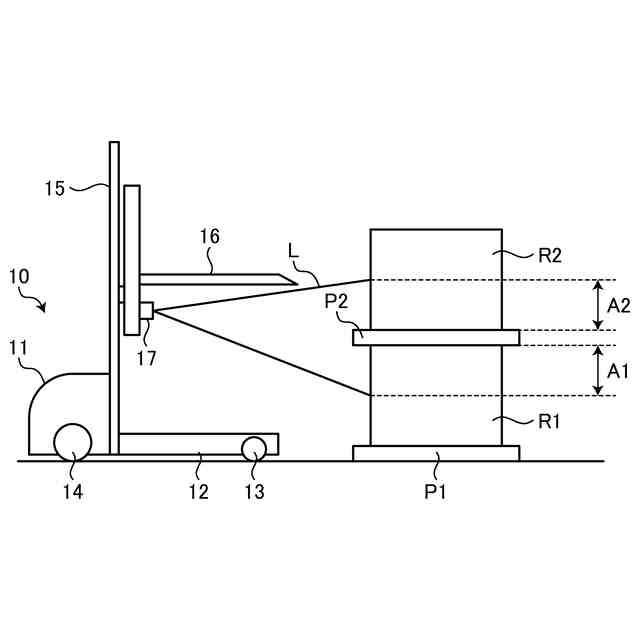
図3は、上部検出領域および下部検出領域を説明するための概略図である。
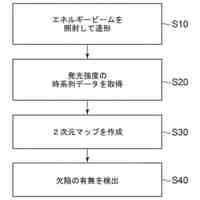
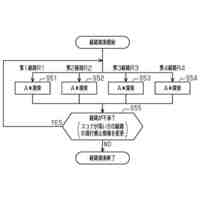
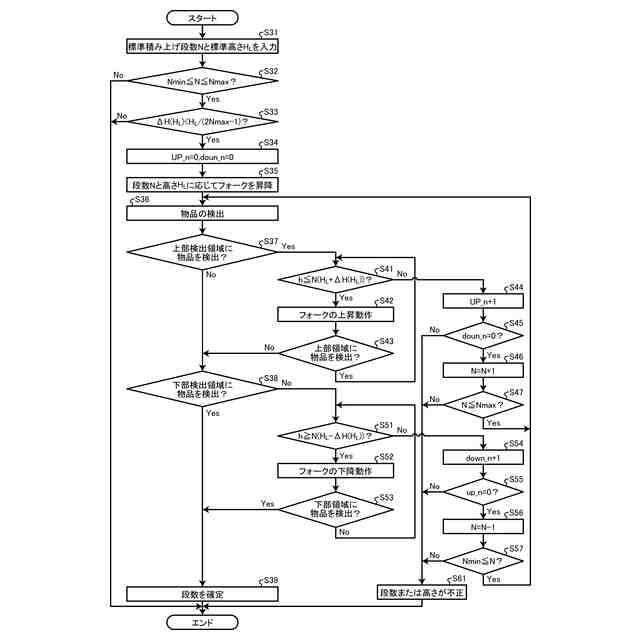
図4は、フォークリフトの制御方法を表すフローチャートである。
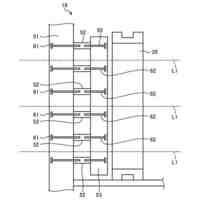
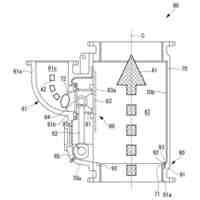
図5は、物品の検出方法を説明するための概略図である。
図6は、第2実施形態のフォークリフトの制御装置による制御方法を表すフローチャートである。
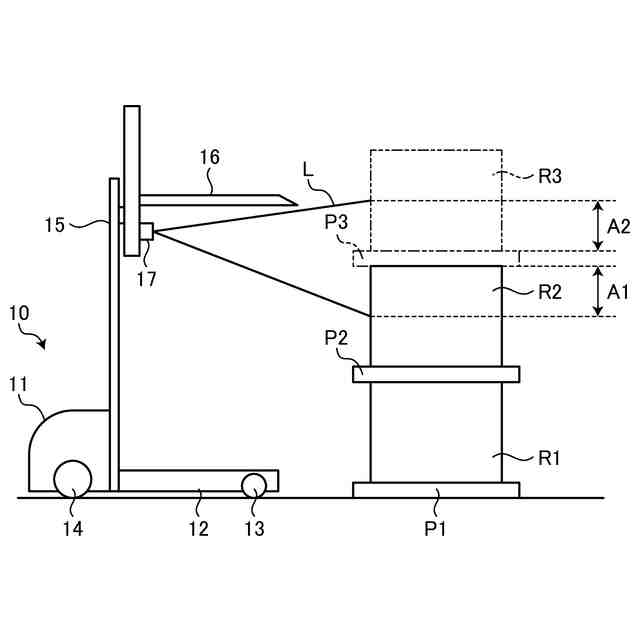
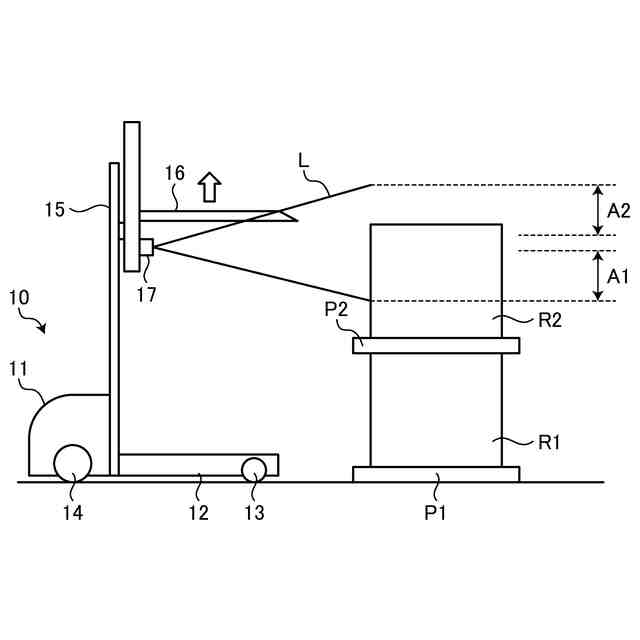
図7は、高さの高い物品の検出方法を説明するための概略図である。
図8は、高さの高い物品の検出方法を説明するための概略図である。
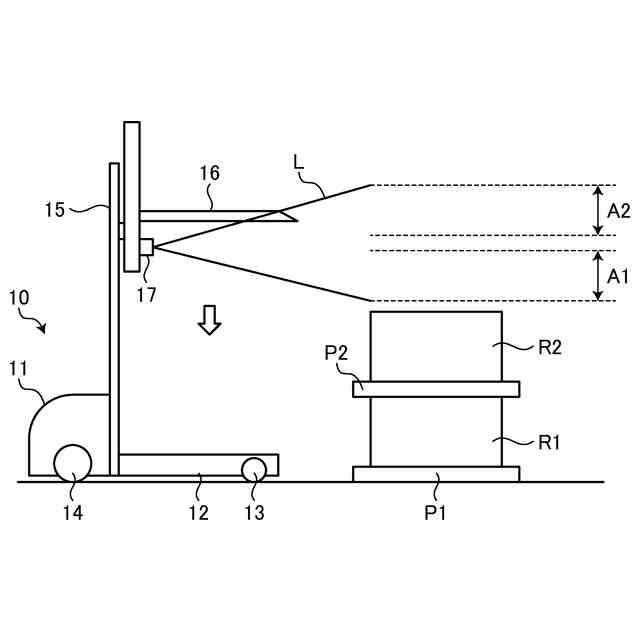
図9は、高さの低い物品の検出方法を説明するための概略図である。
図10は、高さの低い物品の検出方法を説明するための概略図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱重工業株式会社
清掃装置
3日前
三菱重工業株式会社
回転機械
1か月前
三菱重工業株式会社
加圧容器
1か月前
三菱重工業株式会社
フィルタ装置
2日前
三菱重工業株式会社
風力発電装置
2日前
三菱重工業株式会社
容器解体装置
6日前
三菱重工業株式会社
排熱システム
1か月前
三菱重工業株式会社
主蒸気管洗浄方法
2日前
三菱重工業株式会社
コールドプレート
1か月前
三菱重工業株式会社
排熱回収システム
25日前
三菱重工業株式会社
軌道系交通システム
2日前
三菱重工業株式会社
放射性物質移送容器
1か月前
三菱重工業株式会社
炉内構造物の解体方法
6日前
三菱重工業株式会社
造形プロセスの監視方法
10日前
三菱重工業株式会社
計測装置、及び積層造形装置
24日前
三菱重工業株式会社
水素供給システムおよび方法
6日前
三菱重工業株式会社
計測装置、及び積層造形装置
24日前
三菱重工業株式会社
ウエハステージ冷却システム
10日前
三菱重工業株式会社
内燃機関の制御装置および方法
2日前
三菱重工業株式会社
蒸気タービン翼及び蒸気タービン
2日前
三菱重工業株式会社
蒸気生成システム及び蒸気生成方法
3日前
三菱重工業株式会社
自転防止機構、及びスクロール圧縮機
26日前
三菱重工業株式会社
電力変換器、および電力変換器の製造方法
2日前
三菱重工業株式会社
アンモニア分解触媒および排ガス処理方法
25日前
三菱重工業株式会社
排気設備、及びこれを備えるガスタービン
4日前
三菱重工業株式会社
ガスタービン起動方法、及び、ガスタービン
16日前
三菱重工業株式会社
除去装置、除去装置の制御装置および除去方法
6日前
三菱重工業株式会社
静翼セグメント、及びこれを備える蒸気タービン
18日前
三菱重工業株式会社
液滴噴霧ユニット、および、蒸気タービンシステム
10日前
三菱重工業株式会社
弁装置及び固体燃料粉砕装置並びに弁装置の運転方法
25日前
三菱重工業株式会社
経路生成装置、経路生成方法、および経路生成プログラム
25日前
三菱重工業株式会社
治具モデル作成装置、治具モデル作成方法及びプログラム
24日前
三菱重工業株式会社
圧縮機静翼、これを備える圧縮機、及びガスタービン設備
25日前
三菱重工業株式会社
フォークリフトの制御装置および方法並びにフォークリフト
2日前
三菱重工業株式会社
電解装置の運転方法、電解装置の制御装置、および電解システム
25日前
三菱重工業株式会社
スピレージホッパ及び粉砕機並びにスピレージホッパの運転方法
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ