TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140897
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040537
出願日
2024-03-14
発明の名称
レーザビーム真直度測定機、レーザビーム真直度測定方法及びレーザビーム真直度測定機の製造方法
出願人
国立大学法人長岡技術科学大学
,
中央精機株式会社
代理人
個人
,
個人
主分類
G01B
11/30 20060101AFI20250919BHJP(測定;試験)
要約
【課題】高精度化を実現し得るレーザビーム真直度測定機等を提供する。
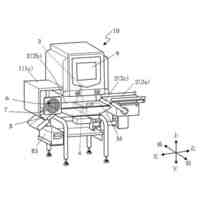
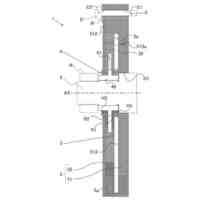
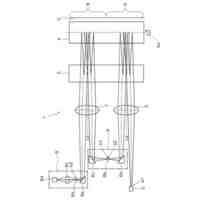
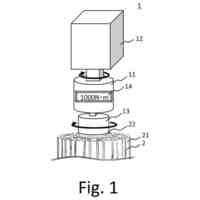
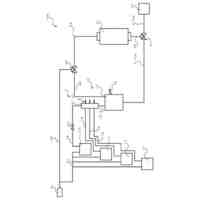
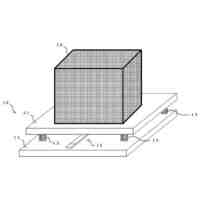
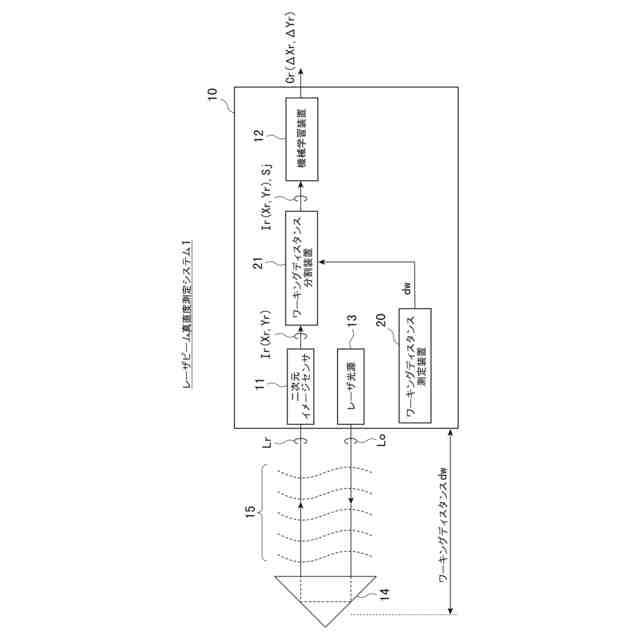
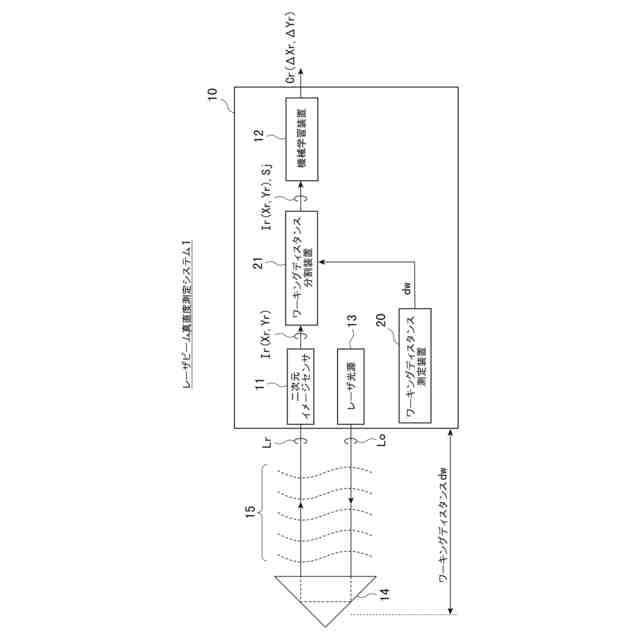
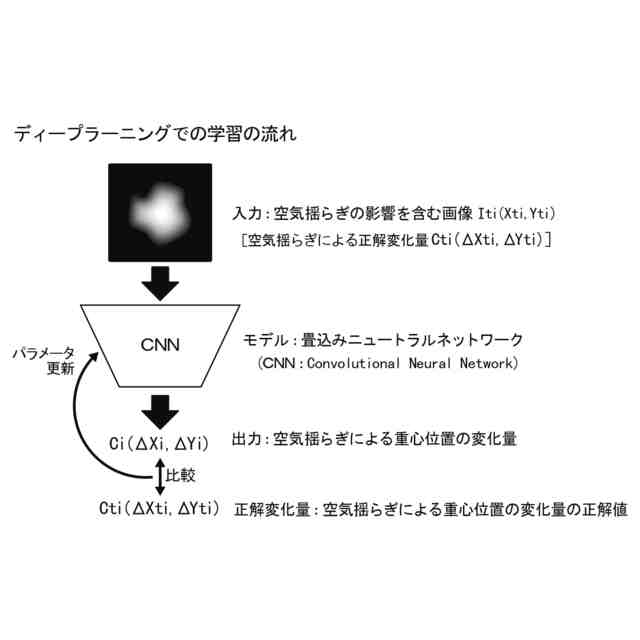
【解決手段】このレーザビーム真直度測定機10は、リトロリフレクタ14に向けてコリメートされたレーザビームLoを出射するレーザ光源13、リトロリフレクタ14から反射されるレーザビームLrを受光して二次元強度分布Ir(Xr,Yr)を検出する二次元イメージセンサ11、検出された二次元強度分布Ir(Xr,Yr)の重心位置の空気揺らぎによる変化量Cr(ΔXr,ΔYr)を推定する機械学習装置12を備える。機械学習装置12は、リトロリフレクタ14の異なる距離における二次元強度分布を教師データとする機械学習によりあらかじめ生成される学習済みモデルに、検出されている二次元強度分布Ir(Xr,Yr)を入力して重心位置の変化量Cr(ΔXr,ΔYr)を求める。教師データはレーザビームLoの出射方向に沿う少なくとも二つ以上の距離において取得される。
【選択図】図1
特許請求の範囲
【請求項1】
リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、
前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、
該二次元イメージセンサで検出される前記二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、
を備え、
該機械学習装置は、
前記リトロリフレクタの前記レーザビームの出射方向に沿う異なる距離における前記二次元強度分布を教師データとする機械学習によりあらかじめ生成される学習済みモデルに、前記二次元イメージセンサに検出されている前記二次元強度分布を入力して前記検出位置の前記変化量を求める構成になっており、
前記教師データは、
前記リトロリフレクタの前記レーザビームの出射方向に沿う少なくとも二つ以上の距離において取得される、
ことを特徴とするレーザビーム真直度測定機。
続きを表示(約 3,100 文字)
【請求項2】
前記学習済みモデルが、
所定距離区間に分割された各々の分割距離区間ごとに生成されており、
前記機械学習装置が前記検出位置の前記変化量を求める際には、
前記リトロリフレクタの距離が含まれる前記分割距離区間に対応する前記学習済みモデルが用いられる、
ことを特徴とする請求項1に記載のレーザビーム真直度測定機。
【請求項3】
前記教師データは、
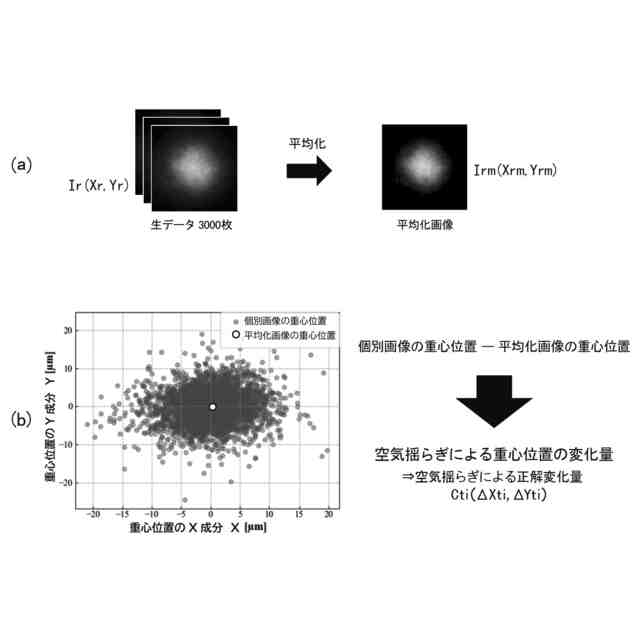
前記リトロリフレクタの距離を固定した状態で検出される複数の前記二次元強度分布を用いて算出される基準位置と、前記複数の前記二次元強度分布に含まれる個別の前記二次元強度分布の前記検出位置とにより決定される空気揺らぎによる正解変化量、及び、前記個別の前記二次元強度分布、の組合せとして構成される、
ことを特徴とする請求項1又は2に記載のレーザビーム真直度測定機。
【請求項4】
リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、
前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、
該二次元イメージセンサで検出される前記二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、
を備え、
該機械学習装置は、
前記二次元強度分布と該二次元強度分布に対する空気揺らぎによる正解変化量の組合せを教師データとする機械学習によりあらかじめ生成される学習済みモデルに、前記二次元イメージセンサに検出されている前記二次元強度分布を入力して前記検出位置の前記変化量を求める構成になっており、
前記学習済みモデルが、
所定距離区間に分割された各々の分割距離区間ごとに生成されており、
前記機械学習装置が前記検出位置の前記変化量を求める際には、
前記リトロリフレクタの前記レーザビームの出射方向に沿う距離が含まれる前記分割距離区間に対応する前記学習済みモデルが用いられる、
ことを特徴とするレーザビーム真直度測定機。
【請求項5】
リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、
前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、
該二次元イメージセンサで検出される前記二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、
を用い、
前記二次元イメージセンサが、前記リトロリフレクタから反射される前記レーザビームの前記二次元強度分布を検出する強度分布検出ステップと、
前記機械学習装置が、前記リトロリフレクタの前記レーザビームの出射方向に沿う異なる距離における前記二次元強度分布を教師データとする機械学習によりあらかじめ生成された学習済みモデルに、前記強度分布検出ステップで検出された前記二次元強度分布を入力して前記検出位置の前記変化量を求める変化量算出ステップと、を有し、
前記教師データは、
前記リトロリフレクタの前記レーザビームの出射方向に沿う少なくとも二つ以上の距離において取得される、
ことを特徴とするレーザビーム真直度測定方法。
【請求項6】
前記学習済みモデルが、
所定距離区間に分割された各々の分割距離区間ごとに生成されており、
前記機械学習装置が前記検出位置の前記変化量を求める際には、
前記リトロリフレクタの距離が含まれる前記分割距離区間に対応する前記学習済みモデルが用いられる、
ことを特徴とする請求項5に記載のレーザビーム真直度測定方法。
【請求項7】
前記教師データは、
前記リトロリフレクタの距離を固定した状態で検出される複数の前記二次元強度分布を用いて算出される基準位置と、前記複数の前記二次元強度分布に含まれる個別の前記二次元強度分布の前記検出位置とにより決定される空気揺らぎによる正解変化量、及び、前記個別の前記二次元強度分布、の組合せとして構成される、
ことを特徴とする請求項5又は6に記載のレーザビーム真直度測定方法。
【請求項8】
リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、
前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、
該二次元イメージセンサで検出される前記二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、
を用い、
前記二次元イメージセンサが、前記リトロリフレクタから反射される前記レーザビームの前記二次元強度分布を検出する強度分布検出ステップと、
前記機械学習装置が、前記二次元強度分布と該二次元強度分布に対する空気揺らぎによる正解変化量の組合せを教師データとする機械学習によりあらかじめ生成された学習済みモデルに、前記強度分布検出ステップで検出された前記二次元強度分布を入力して前記検出位置の前記変化量を求める変化量算出ステップと、を有し、
前記学習済みモデルが、
所定距離区間に分割された各々の分割距離区間ごとに生成されており、
前記機械学習装置が前記検出位置の前記変化量を求める際には、
前記リトロリフレクタの前記レーザビームの出射方向に沿う距離が含まれる前記分割距離区間に対応する前記学習済みモデルが用いられる、
ことを特徴とするレーザビーム真直度測定方法。
【請求項9】
リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、
前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、
前記リトロリフレクタの前記レーザビームの出射方向に沿う異なる距離における前記二次元強度分布を教師データとする機械学習によりあらかじめ生成される学習済みモデルに、前記二次元イメージセンサに検出されている前記二次元強度分布を入力して該二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、
を備えるレーザビーム真直度測定機の製造方法であって、
前記リトロリフレクタの前記レーザビームの出射方向に沿う少なくとも二つ以上の距離において前記教師データの作成に用いられる前記二次元強度分布を取得する教師用強度分布取得工程と、
該教師用強度分布取得工程で取得された前記二次元強度分布を用いて前記教師データを作成する教師データ作成工程と、
該教師データ作成工程で作成された前記教師データを用いて前記機械学習を行い、前記学習済みモデルを生成する機械学習工程と、を有する、
ことを特徴とするレーザビーム真直度測定機の製造方法。
【請求項10】
前記機械学習工程では、
所定距離区間に分割された各々の分割距離区間ごとに前記学習済みモデルを生成する、
ことを特徴とする請求項9に記載のレーザビーム真直度測定機の製造方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、真直度を測定するレーザビーム真直度測定機、レーザビーム真直度測定方法及びレーザビーム真直度測定機の製造方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
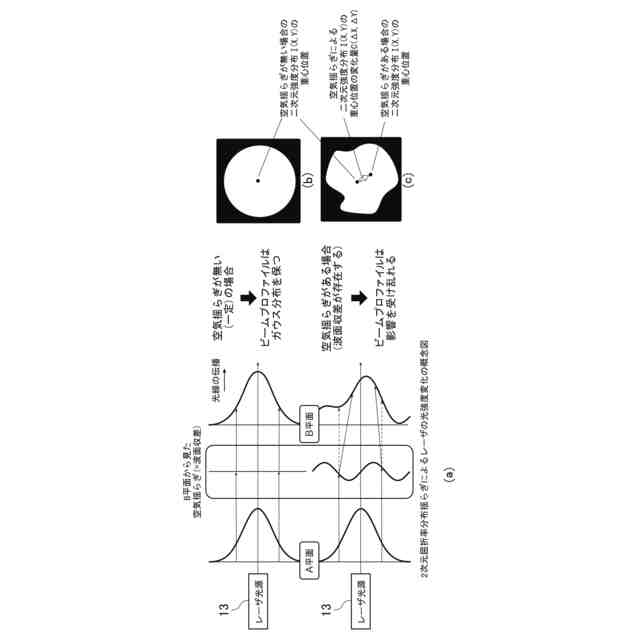
精密測定や精密加工の分野において、重要な測定項目の一つである真直度に対してはレーザの持つ直進性を利用する方法がある(例えば特許文献1、2参照)。レーザによる真直度の測定方法は様々に研究されているが、現在ではレーザ干渉を用いるタイプと、共通光路距離センサ上のビーム位置の変動を直接検出するタイプとが、それぞれ測定機として市販されている。本発明では後者の測定機を扱う。これらレーザを用いた測定はその多くが大気中で行われるため、環境要因によって空気屈折率が変動し、測定結果に誤差として現れる。この空気屈折率の時間的及び空間的な変化を空気揺らぎと称する。この空気揺らぎはレーザビームの波面に変動をもたらし(波面収差の発生)、ビームプロファイルの変化を引き起こし、レーザビームの直進性を損なう。
【先行技術文献】
【特許文献】
【0003】
特開平01‐057111号公報
特開平01‐057110号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
空気揺らぎによる影響を補正する方法は、天文学分野では補償光学と呼ばれて発展が著しい。精密測定分野においては、デジタル光学的位相共役法などが提案されている。デジタル光学的位相共役法では、光路の波面収差を波面センサで測定し、測定した波面収差に共役な収差をビームに与える(例えば空間光学変調器で反射する)ことにより、波面収差を除去する。しかしながら、デジタル光学的位相共役法では、波面センサを必要とするなど、構成が複雑化するという問題があった。
【0005】
そこで、本発明の目的は、収差によるビームプロファイル(レーザビームの強度分布)に着目することにより高精度化を実現し得るレーザビーム真直度測定機等を提供することにある。
【課題を解決するための手段】
【0006】
かかる課題を解決するために、請求項1に記載の発明は、リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、該二次元イメージセンサで検出される前記二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、を備え、該機械学習装置は、前記リトロリフレクタの前記レーザビームの出射方向に沿う異なる距離における前記二次元強度分布を教師データとする機械学習によりあらかじめ生成される学習済みモデルに、前記二次元イメージセンサに検出されている前記二次元強度分布を入力して前記検出位置の前記変化量を求める構成になっており、前記教師データは、前記リトロリフレクタの前記レーザビームの出射方向に沿う少なくとも二つ以上の距離において取得されることを特徴とする。
【0007】
請求項2に係る発明は、請求項1に記載の構成に加えて、前記学習済みモデルが、所定距離区間に分割された各々の分割距離区間ごとに生成されており、前記機械学習装置が前記検出位置の前記変化量を求める際には、前記リトロリフレクタの距離が含まれる前記分割距離区間に対応する前記学習済みモデルが用いられることを特徴とする。
【0008】
請求項3に係る発明は、請求項1又は2に記載の構成に加えて、前記教師データは、前記リトロリフレクタの距離を固定した状態で検出される複数の前記二次元強度分布を用いて算出される基準位置と、前記複数の前記二次元強度分布に含まれる個別の前記二次元強度分布の前記検出位置とにより決定される空気揺らぎによる正解変化量、及び、前記個別の前記二次元強度分布、の組合せとして構成されることを特徴とする。
【0009】
請求項4に係る発明は、リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、該二次元イメージセンサで検出される前記二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、を備え、該機械学習装置は、前記二次元強度分布と該二次元強度分布に対する空気揺らぎによる正解変化量の組合せを教師データとする機械学習によりあらかじめ生成される学習済みモデルに、前記二次元イメージセンサに検出されている前記二次元強度分布を入力して前記検出位置の前記変化量を求める構成になっており、前記学習済みモデルが、所定距離区間に分割された各々の分割距離区間ごとに生成されており、前記機械学習装置が前記検出位置の前記変化量を求める際には、前記リトロリフレクタの前記レーザビームの出射方向に沿う距離が含まれる前記分割距離区間に対応する前記学習済みモデルが用いられることを特徴とする。
【0010】
請求項5に記載の発明は、リトロリフレクタに向けてコリメートされたレーザビームを出射するレーザ光源と、前記リトロリフレクタから反射される前記レーザビームを受光して該レーザビームの二次元強度分布を検出する二次元イメージセンサと、該二次元イメージセンサで検出される前記二次元強度分布の検出位置の空気揺らぎによる変化量を推定する機械学習装置と、を用い、前記二次元イメージセンサが、前記リトロリフレクタから反射される前記レーザビームの前記二次元強度分布を検出する強度分布検出ステップと、前記機械学習装置が、前記リトロリフレクタの前記レーザビームの出射方向に沿う異なる距離における前記二次元強度分布を教師データとする機械学習によりあらかじめ生成された学習済みモデルに、前記強度分布検出ステップで検出された前記二次元強度分布を入力して前記検出位置の前記変化量を求める変化量算出ステップと、を有し、前記教師データは、前記リトロリフレクタの前記レーザビームの出射方向に沿う少なくとも二つ以上の距離において取得されることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
計量スプーン
27日前
個人
微小振動検出装置
1か月前
株式会社イシダ
X線検査装置
1か月前
日本精機株式会社
位置検出装置
5日前
日本精機株式会社
位置検出装置
5日前
日本精機株式会社
位置検出装置
5日前
大和製衡株式会社
組合せ秤
10日前
大和製衡株式会社
組合せ秤
10日前
アズビル株式会社
圧力センサ
4日前
エイブリック株式会社
磁気センサ回路
4日前
株式会社東芝
センサ
10日前
アンリツ株式会社
分光器
1か月前
トヨタ自動車株式会社
表示装置
19日前
ダイハツ工業株式会社
測定用具
1か月前
株式会社東芝
センサ
10日前
トヨタ自動車株式会社
検査装置
7日前
アンリツ株式会社
分光器
1か月前
株式会社ユーシン
操作検出装置
7日前
株式会社東芝
センサ
1か月前
個人
粘塑性を用いた有限要素法の定式化
19日前
株式会社ヨコオ
コンタクタ
1か月前
東レエンジニアリング株式会社
計量装置
7日前
TDK株式会社
ガスセンサ
3日前
TDK株式会社
磁気センサ
1か月前
株式会社精工技研
光電圧プローブ
1か月前
株式会社ナリス化粧品
角層細胞採取用具
17日前
株式会社東芝
重量測定装置
3日前
TDK株式会社
ガスセンサ
4日前
TDK株式会社
磁気センサ
27日前
大同特殊鋼株式会社
超音波探傷方法
27日前
富士電機株式会社
半導体パッケージ
27日前
株式会社関電工
検相器用治具
25日前
個人
材料特性パラメータの算定方法
27日前
大陽日酸株式会社
液面センサ
1か月前
日本碍子株式会社
ガスセンサ
28日前
国立大学法人京都大学
バイオセンサ
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ