TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134398
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032281
出願日
2024-03-04
発明の名称
予測プログラム、予測方法および情報処理装置
出願人
富士通株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G06F
30/27 20200101AFI20250909BHJP(計算;計数)
要約
【課題】AIによって予測される解の精度を向上させること。
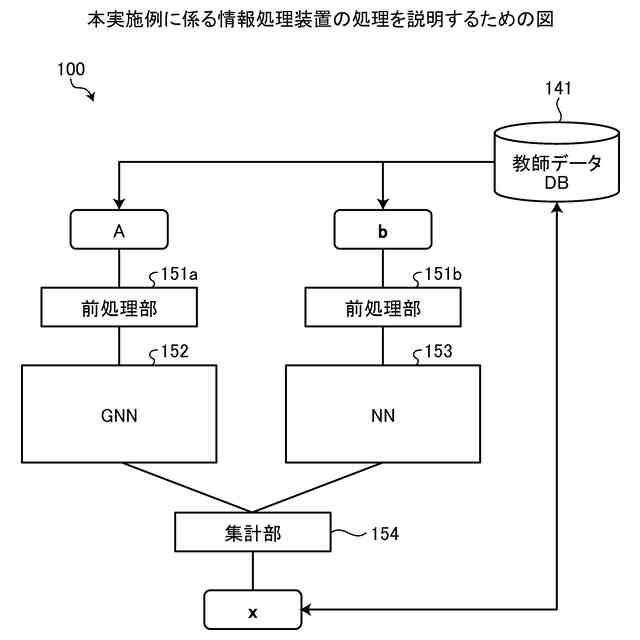
【解決手段】情報処理装置は、構造物の剛性行列を第1学習モデルに入力することで、第1学習モデルから出力された第1出力結果を取得する。情報処理装置は、構造物に加えられた荷重のベクトルを第2学習モデルに入力することで、第2学習モデルから出力された第2出力結果を取得する。情報処理装置は、第1出力結果と第2出力結果とを基にして、荷重が加えられたことによる構造物の変位を予測する。
【選択図】図13
特許請求の範囲
【請求項1】
構造物の剛性行列を第1学習モデルに入力することで、前記第1学習モデルから出力された第1出力結果を取得し、
前記構造物に加えられた荷重のベクトルを第2学習モデルに入力することで、前記第2学習モデルから出力された第2出力結果を取得し、
前記第1出力結果と前記第2出力結果とを基にして、前記荷重が加えられたことによる前記構造物の変位を予測する
処理をコンピュータに実行させることを特徴とする予測プログラム。
続きを表示(約 950 文字)
【請求項2】
前記剛性行列および前記荷重のベクトルに対応する前記変位の正解データを取得し、
前記予測する処理によって予測された変位と前記正解データとの差分が小さくなるように、前記第1学習モデルおよび前記第2学習モデルのパラメータを更新する処理を更にコンピュータに実行させることを特徴とする請求項1に記載の予測プログラム。
【請求項3】
前記変位を予測する処理は、前記第1出力結果と前記第2出力結果との要素積によって、前記構造物の変位を予測することを特徴とする請求項1に記載の予測プログラム。
【請求項4】
前記第1出力結果および前記第2出力結果は行列であり、前記第2出力結果の行数を、前記第1出力結果の行数に合わせる処理を更にコンピュータに実行させることを特徴とする請求項3に記載の予測プログラム。
【請求項5】
第1出力結果を取得する処理は、前記剛性行列に対して主成分分析を実行することで前記剛性行列の次元を削減し、次元を削減した剛性行列を前記第1学習モデルに入力して、前記第1出力結果を取得することを特徴とする請求項1に記載の予測プログラム。
【請求項6】
構造物の剛性行列を第1学習モデルに入力することで、前記第1学習モデルから出力された第1出力結果を取得し、
前記構造物に加えられた荷重のベクトルを第2学習モデルに入力することで、前記第2学習モデルから出力された第2出力結果を取得し、
前記第1出力結果と前記第2出力結果とを基にして、前記荷重が加えられたことによる前記構造物の変位を予測する
処理をコンピュータが実行することを特徴とする予測方法。
【請求項7】
構造物の剛性行列を第1学習モデルに入力することで、前記第1学習モデルから出力された第1出力結果を取得し、
前記構造物に加えられた荷重のベクトルを第2学習モデルに入力することで、前記第2学習モデルから出力された第2出力結果を取得し、
前記第1出力結果と前記第2出力結果とを基にして、前記荷重が加えられたことによる前記構造物の変位を予測する
処理を実行する制御部を有する情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、予測プログラム等に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
工学や建築等の分野において、構造解析が利用されている。構造解析は、物体や構造物が外部からの力や荷重にどのように反応するかを分析することを目的とする。構造解析では、有限要素法(Finite Element Method:FEM)等の手法が用いられる。
【0003】
図23は、構造解析を説明するための図である。図23に示す例では、片持ち梁10に外力11を加えた場合について説明する。有限要素法では、片持ち梁10を有限要素に分割し、個々の要素について変位等を近似計算する。
【0004】
有限要素法では、初期条件、境界条件を用いて、式(1)に示すような方程式を作成する。式(1)において、「A」は、物体の材質等から計算される係数行列(剛性行列)であり、定義1のように示される。「b」は、境界条件による荷重ベクトルであり、定義2のように示される。「x」は、変位ベクトル(未知数)であり、定義3のように示される。
【0005】
TIFF
2025134398000002.tif
6
170
【0006】
TIFF
2025134398000003.tif
7
170
TIFF
2025134398000004.tif
7
170
TIFF
2025134398000005.tif
7
170
【0007】
式(1)に示される方程式(たとえば、支配方程式)を求解する場合、直接法または反復法が用いられる。直接法は、Aの逆行列を求め、直接xを計算する方法である。反復法は、たとえば、「b-Ax」が設定値以下となるまで反復計算し、xを厳密解に近づける方法である。
【0008】
ここで、式(1)に含まれる剛性行列Aと、荷重ベクトルbの一例について説明する。図24は、剛性行列Aおよび荷重ベクトルbを説明する図である。たとえば、部材12を分割すると、2個の三角形となり、4個の頂点が設定される。各頂点をノードn1、ノードn2、ノードn3、ノードn4とする。
【0009】
各ノードの剛性や接続性等に関する情報が、剛性行列Aに設定される。たとえば、ノードn1の剛性は、剛性行列Aの「ノードn1」と「ノードn1」に対応する領域An1-1の各セルに設定される。ノードn1とノードn2との剛性は、剛性行列Aの「ノードn1」と「ノードn2」に対応する領域An2-1,An1-2の各セルに設定される。なお、ノードn2と、ノードn4とは隣接していないため、剛性行列Aの「ノードn2」と「ノードn4」とに対応する領域An2-4,An4-2の各セルには、「0」が設定される。他のノードの組みに関する剛性(接続性)も同様にして、剛性行列Aに設定される。
【0010】
各ノードに対する荷重ベクトルに関する情報が、荷重ベクトルbに設定される。たとえば、ノードn1に対する荷重ベクトルのx、y、z方向の情報が、領域b-n1に設定される。ノードn2に対する荷重ベクトルのx、y、z方向の情報が、領域b-n2に設定される。ノードn3に対する荷重ベクトルのx、y、z方向の情報が、領域b-n3に設定される。ノードn4に対する荷重ベクトルのx、y、z方向の情報が、領域b-n4に設定される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
富士通株式会社
半導体装置
2か月前
富士通株式会社
行列演算回路
2か月前
富士通株式会社
半導体デバイス
2か月前
富士通株式会社
画像処理モデル
1か月前
富士通株式会社
メッシュ微細化
2か月前
富士通株式会社
演算器及び演算方法
2か月前
富士通株式会社
ダウンサンプリング
12日前
富士通株式会社
冷却装置及び電子機器
2か月前
富士通株式会社
ポイントクラウド分類
1か月前
富士通株式会社
アレイアンテナモジュール
2か月前
富士通株式会社
光受信装置及び光受信方法
12日前
富士通株式会社
OLT及びPONシステム
1か月前
富士通株式会社
電子機器筐体及び電子機器
1か月前
富士通株式会社
光送信器及び光トランシーバ
1か月前
富士通株式会社
基板及びこれを備えた電子装置
2か月前
富士通株式会社
演算処理装置及び情報処理装置
1か月前
富士通株式会社
通信制御装置及び移動中継装置
2か月前
富士通株式会社
プログラム及びデータ処理装置
26日前
富士通株式会社
情報処理装置及び情報処理方法
18日前
富士通株式会社
情報処理装置および情報処理方法
12日前
富士通株式会社
波長変換装置および波長変換方法
1か月前
富士通株式会社
テキスト案内される画像エディタ
1か月前
富士通株式会社
書き込みアシスト回路及びSRAM
10日前
富士通株式会社
ラックマウント装置及びラック装置
1か月前
富士通株式会社
メモリ管理装置及びメモリ管理方法
1か月前
富士通株式会社
画像生成プログラム、方法、及び装置
3日前
富士通株式会社
不正検知プログラム、方法、及び装置
18日前
富士通株式会社
通知プログラム、通知方法および通知装置
1か月前
富士通株式会社
データ処理方法及び装置、並びに記憶媒体
5日前
富士通株式会社
受光デバイス及び受光デバイスの製造方法
1か月前
富士通株式会社
推定システム、情報処理装置及び推定方法
5日前
富士通株式会社
コンパイルプログラムおよびコンパイル方法
26日前
富士通株式会社
測定装置、測定方法、および測定プログラム
3日前
富士通株式会社
管理装置、管理方法、および管理プログラム
2か月前
富士通株式会社
生成プログラム、生成方法および情報処理装置
1か月前
富士通株式会社
検出プログラム、検出方法および情報処理装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ