TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134303
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032131
出願日
2024-03-04
発明の名称
制御装置、制御方法およびプログラム
出願人
株式会社日立製作所
代理人
弁理士法人湘洋特許事務所
主分類
B25J
19/06 20060101AFI20250909BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アサーティブな行動を行うことができるように自律システムを制御することができる。
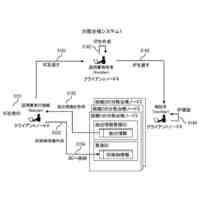
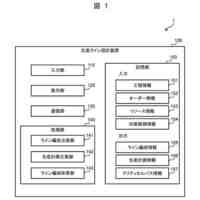
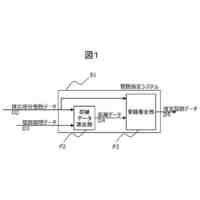
【解決手段】 人または自律システムのいずれかである相手、および、自律システムである制御対象から取得した観測センサデータと、所定の原理と、に基づき導出される、相手が制御対象および相手に期待していると推定される観測を示した選好情報により、相手の自己領域を推定する自己領域推定部と、相手の自己領域と、制御対象の意図と、を用いて、所定の原理に基づき導出される、制御対象が相手および制御対象に期待している観測を示した選好情報により、制御対象の自己領域を決定する自己領域決定部と、制御対象の自己領域に基づき、制御対象の行動を制御するための行動情報を生成し、制御対象の動作を制御する行動生成部と、を備える。
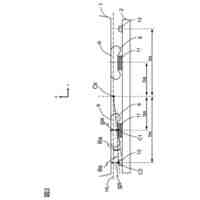
【選択図】図1
特許請求の範囲
【請求項1】
人またはロボットを含む自律システムのいずれかである相手、および、ロボットを含む自律システムである制御対象から取得した観測センサデータと、所定の原理と、に基づき導出される、前記相手が前記制御対象および前記相手に期待していると推定される観測を示した選好情報により、相手の自己領域を推定する自己領域推定部と、
前記相手の自己領域と、前記相手と前記制御対象とが協働して達成される目標である前記制御対象の意図と、を用いて、前記所定の原理に基づき導出される、前記制御対象が前記相手および前記制御対象に期待している観測を示した選好情報により、前記制御対象の自己領域を決定する自己領域決定部と、
前記制御対象の自己領域に基づき、前記制御対象の行動を制御するための行動情報を生成し、当該行動情報を用いて前記制御対象の駆動装置を制御することで、前記制御対象の動作を制御する行動生成部と、を備える
ことを特徴とする制御装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記行動生成部は、
前記相手の自己領域を示す前記選好情報および前記制御対象の自己領域を示す前記選好情報のうち、少なくともいずれか一方を、前記相手が視認可能な表示装置に表示する
ことを特徴とする制御装置。
【請求項3】
請求項1に記載の制御装置であって、
前記行動生成部は、
前記制御対象の自己領域に基づき、前記制御対象が前記相手に期待している観測に近づけるための前記行動情報を生成し、当該行動情報に基づき前記制御対象の動作を制御する
ことを特徴とする制御装置。
【請求項4】
請求項1に記載の制御装置であって、
前記行動生成部は、
推定された前記相手の自己領域と、前記相手が実際に考えている観測の選好と、が一致しているか否かを確認するための前記行動情報を生成し、当該行動情報に基づき前記制御対象の動作を制御する
ことを特徴とする制御装置。
【請求項5】
請求項1に記載の制御装置であって、
前記所定の原理は、自由エネルギー原理である
ことを特徴とする制御装置。
【請求項6】
請求項5に記載の制御装置であって、
前記自己領域推定部は、自由エネルギー原理の生成モデルを用いて、前記相手の自己領域を推定し、
前記自己領域決定部は、前記自由エネルギー原理の生成モデルを用いて、前記制御対象の自己領域を決定する
ことを特徴とする制御装置。
【請求項7】
請求項6に記載の制御装置であって、
前記自己領域推定部は、
前記観測センサデータを用いた解析結果に基づき、前記生成モデルを更新する
ことを特徴とする制御装置。
【請求項8】
請求項1に記載の制御装置であって、
前記自己領域推定部は、
前記制御対象が過去に協働作業を行った前記相手の自己領域と、当該自己領域の推定に用いた前記観測センサデータと、を対応付けた情報を所定のデータベースに記憶させ、
前記相手と協働作業を行う際に、前記データベースから抽出した前記相手に対応する前記自己領域を用いて、当該相手の自己領域を推定する
ことを特徴とする制御装置。
【請求項9】
請求項1に記載の制御装置であって、
前記行動生成部は、
前記観測センサデータに基づき前記相手の行動形態を特定し、
前記制御対象の前記自己領域に基づく前記行動情報であって、特定した前記行動形態に対応する行動情報を生成する
ことを特徴とする制御装置。
【請求項10】
請求項1に記載の制御装置であって、
前記相手には、前記人および前記自律システムのうち少なくとも一方が複数含まれ、
前記自己領域決定部は、
前記相手に含まれる前記人または前記自律システムの中から、前記制御対象が期待する前記選好情報により決定された前記自己領域を伝達すべき対象である行動対象エージェントを特定し、
前記行動生成部は、
前記観測センサデータに基づき前記行動対象エージェントの行動形態を特定し、前記制御対象の前記自己領域に基づく前記行動情報であって、特定した前記行動形態に対応する行動情報を生成する
ことを特徴とする制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
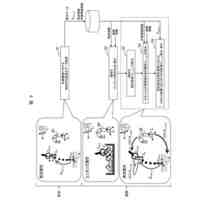
近年、ロボットなどの自律システムに対しては、人間の労働を補完する存在としての期待が高まっている。例えば、人と協働して物を目標場所へ運んだり、介護で人をベッドから起こしたりする等、様々な分野でロボットが人間の労働を補完することが社会的に要請されている。
【0003】
ロボットなどの自律システムが人と協働して目標を達成するには、人の期待に応える受動的な行動だけでなく、ロボット自身が能動的な行動を含むアサーティブな行動を行うことが重要と考えられる。しかしながら、従来のロボットの行動は、受動的なものが主であるため、ロボットのアサーティブな行動の制御が課題として存在する。
【0004】
なお、特許文献1には、自律移動ロボットの制御に関する技術が開示されている。具体的には、同文献には、「自律移動ロボットは、制御装置での動作制御により、周囲に存在する人間の移動情報の検出結果に基づいて人間との干渉を回避する。更に、制御装置では、ロボットが人間に将来的に干渉する可能性が有る場合に、人間におけるロボットに対する認知度を推定し、当該認知度に応じて、前記干渉を回避するための人間への働きかけを選択し、ロボットに動作指令する。更に、制御装置では、前段階で行われた働きかけに対する人間の反応に基づき、必要に応じて、前段階と異なる働きかけを行うようにロボットを動作制御する」と記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2019-84641号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ロボットのアサーティブな行動の実現には、ロボットと人の協働において達成される目標に関して、人の自己領域と、ロボットの意図と、の両方を考慮してロボットの自己領域を決定することが重要と考えられる。
【0007】
一方で、特許文献1の技術では、ロボットに対する人の認識度を推定しているものの、人の自己領域やロボットの意図などは考慮されていない。そのため、特許文献1の技術では、ロボットのアサーティブな行動の実現という課題を解決することは難しいと考えられる。
【0008】
本発明は、上記課題に鑑みてなされたものであり、アサーティブな行動を行うことができるように自律システムを制御することを目的とする。
【課題を解決するための手段】
【0009】
本願は、上記課題の少なくとも一部を解決する手段を複数含んでいるが、その例を挙げるならば、以下のとおりである。上記の課題を解決する本発明の一態様に係る制御装置は、人またはロボットを含む自律システムのいずれかである相手、および、ロボットを含む自律システムである制御対象から取得した観測センサデータと、所定の原理と、に基づき導出される、前記相手が前記制御対象および前記相手に期待していると推定される観測を示した選好情報により、相手の自己領域を推定する自己領域推定部と、前記相手の自己領域と、前記相手と前記制御対象とが協働して達成される目標である前記制御対象の意図と、を用いて、前記所定の原理に基づき導出される、前記制御対象が前記相手および前記制御対象に期待している観測を示した選好情報により、前記制御対象の自己領域を決定する自己領域決定部と、前記制御対象の自己領域に基づき、前記制御対象の行動を制御するための行動情報を生成し、当該行動情報を用いて前記制御対象の駆動装置を制御することで、前記制御対象の動作を制御する行動生成部と、を備える。
【発明の効果】
【0010】
本発明によれば、アサーティブな行動を行うことができるように自律システムを制御することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
鉄道車両
3日前
株式会社日立製作所
ガス分離システム
3日前
株式会社日立製作所
調停案提示システム
4日前
株式会社日立製作所
部品管理装置及び方法
10日前
株式会社日立製作所
情報処理装置、情報処理方法
12日前
株式会社日立製作所
蒸発乾固装置および蒸発乾固方法
11日前
株式会社日立製作所
治療効果予測システムおよび方法
4日前
株式会社日立製作所
情報処理システム、及び情報処理方法
10日前
株式会社日立製作所
計算機システム及び障害対処支援方法
4日前
株式会社日立製作所
情報処理システム、及び情報処理方法
12日前
株式会社日立製作所
説明情報生成装置及び説明情報生成方法
11日前
株式会社日立製作所
故障要因分析装置及び故障要因分析方法
11日前
株式会社日立製作所
圧延設定支援装置及び圧延設定支援方法
3日前
株式会社日立製作所
臨床試験計画装置および臨床試験計画方法
12日前
株式会社日立製作所
燃料電池ブロックおよび燃料電池システム
4日前
株式会社日立製作所
制御装置,移動体,制御システム及び制御方法
6日前
株式会社日立製作所
搬送装置を制御する制御システム及び制御方法
3日前
株式会社日立製作所
生産ラインを編成する装置、システムおよび方法
5日前
株式会社日立製作所
異常事象対処支援装置および異常事象対処支援方法
5日前
株式会社日立製作所
クラウドデータベースシステム及びデータ管理方法
12日前
株式会社日立製作所
エンティティ抽出システム、エンティティ選択方法
5日前
株式会社日立製作所
ストレージシステム及びストレージシステムの制御方法
11日前
株式会社日立製作所
速度異常検出装置、乗客コンベア及び速度異常検出方法
12日前
株式会社日立製作所
水電解システムの運用装置及び水電解システムの運用方法
11日前
株式会社日立製作所
飛行体検知装置、飛行体検知方法、及び飛行体制御システム
10日前
株式会社日立製作所
代替材料提案システム、代替材料提案方法およびプログラム
12日前
株式会社日立製作所
ロボット制御装置、ロボット、及び、ロボット制御システム
11日前
株式会社日立製作所
情報処理方法、情報処理プログラム、及び情報処理システム
10日前
株式会社日立製作所
管路推定システム、管路推定方法、および管路推定プログラム
3日前
株式会社日立製作所
自動画面操作テスト支援装置及び自動画面操作テスト支援方法
11日前
株式会社日立製作所
ロジックモデル作成支援装置およびロジックモデル作成支援方法
12日前
株式会社日立製作所
障害分析システム、障害分析方法、及び障害分析モデル生成方法
10日前
株式会社日立製作所
データ連動システム、データ連動方法及びデータ連動プログラム
10日前
株式会社日立製作所
ロボット管理装置、ロボット管理システムおよびロボット管理方法
11日前
株式会社日立製作所
栄養塩類徐放性ブロックの製造方法および栄養塩類徐放性ブロック
11日前
株式会社日立製作所
浄水薬品注入制御システム、浄水薬品注入制御方法、及びプログラム
11日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ