TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154723
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057885
出願日
2024-03-29
発明の名称
飛行体検知装置、飛行体検知方法、及び飛行体制御システム
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G08G
5/00 20250101AFI20251002BHJP(信号)
要約
【課題】
空域内の飛行体の交通を安全に制御すること。
【解決手段】
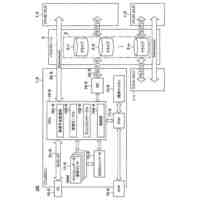
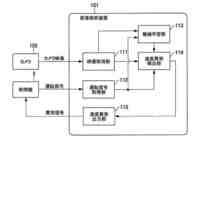
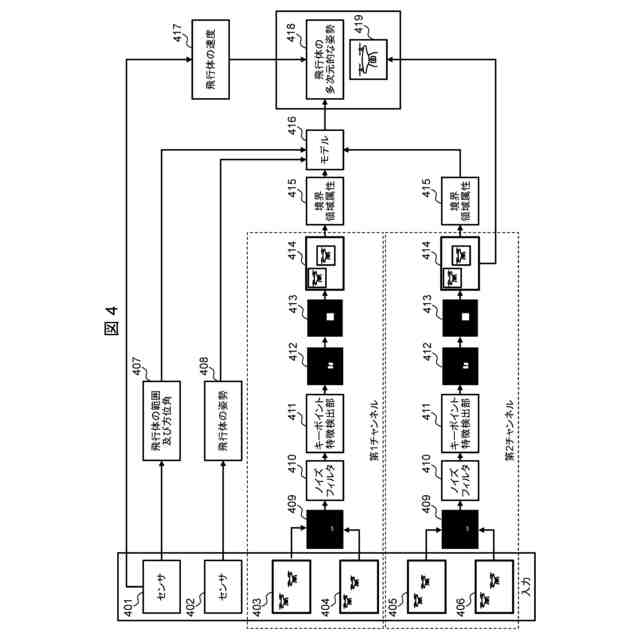
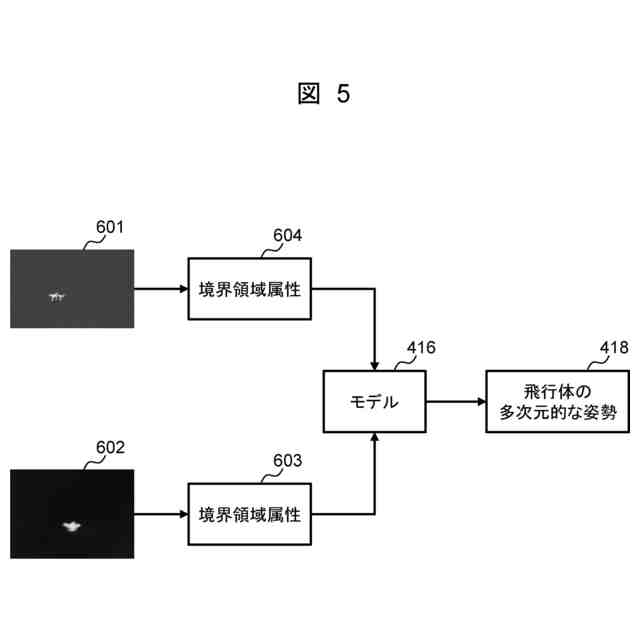
空域において検知される飛行体について、所定期間内に複数回取得される前記空域内の空域環境データが入力される取得部308と、各空域環境データに基づく空域の視差画像としての画像409に含まれる空域の各単位領域の境界に関する各境界領域属性、各単位領域のうちから飛行体に関係する特定の単位領域を識別する単位領域識別部と、空域の各単位領域のうちの特定の単位領域に対応する飛行体の特定の境界領域属性と、特定の単位領域の範囲及び方位角と、をモデル416に入力し、モデル416を用いて飛行体の3次元的な姿勢を推定する姿勢算出部310と、を備える。
【選択図】 図4
特許請求の範囲
【請求項1】
空域において検知される飛行体について、所定期間内に複数回取得される前記空域内の空域環境データが入力される取得部と、
各前記空域環境データに基づく前記空域の視差画像に含まれる前記空域の各単位領域の境界に関する各境界領域属性を導出し、前記各単位領域のうちから前記飛行体に関係する特定の単位領域を識別する単位領域識別部と、
前記特定の単位領域に対応する前記飛行体の特定の境界領域属性と、前記特定の単位領域の範囲及び方位角と、を学習モデルに入力し、前記学習モデルを用いて前記飛行体の多次元的な姿勢を推定する姿勢算出部と、
を備えることを特徴とする飛行体検知装置。
続きを表示(約 1,700 文字)
【請求項2】
前記取得部は、
所定距離に離間して配置されている複数の監視部によって前記飛行体を含む前記空域を監視し、前記複数の監視部の監視結果に基づく各前記空域環境データとして前記空域内の画像を取得する
ことを特徴とする請求項1に記載の飛行体検知装置。
【請求項3】
前記単位領域識別部は、
前記画像に基づいて前記飛行体の種類を識別する
ことを特徴とする請求項2に記載の飛行体検知装置。
【請求項4】
前記複数の監視部のいずれかは、
レーダ、LiDAR、または、前記飛行体の飛行を無線通信によって制御する制御機器である
ことを特徴とする請求項2に記載の飛行体検知装置。
【請求項5】
推定された前記飛行体の多次元的な姿勢に基づいて潜在的なリスクが存在するか否かを判断するリスク推定部と、
前記リスク推定部の判断結果に基づいて、警告通知を生成する警告通知生成部と、
前記警告通知生成部が生成した前記警告通知を出力する出力部と、
を備えることを特徴とする請求項2に記載の飛行体検知装置。
【請求項6】
前記リスク推定部は、
前記飛行体の特定の境界領域属性から導出した前記飛行体の特徴に基づいて前記飛行体の種類を識別し、前記飛行体の種類に応じた潜在的なリスクが存在するか否かを判断する
ことを特徴とする請求項5に記載の飛行体検知装置。
【請求項7】
前記複数の監視部は、
前記空域内を監視するために空間的に分散して配置されている
ことを特徴とする請求項2に記載の飛行体検知装置。
【請求項8】
前記姿勢算出部は、
前記飛行体の特定の境界領域属性と、
前記特定の単位領域の範囲及び方位角と、
前記飛行体に搭載されるセンサを用いて取得される前記飛行体の姿勢と、を前記学習モデルに入力し、前記学習モデルを用いて前記飛行体の多次元的な姿勢を推定する
ことを特徴とする請求項1に記載の飛行体検知装置。
【請求項9】
空域を飛行する飛行体と、
前記飛行体を検知する飛行体検知装置と、を備え、
前記飛行体検知装置は、
空域において検知される飛行体について、所定期間内に複数回取得される前記空域内の空域環境データが入力される取得部と、
各前記空域環境データに基づく前記空域の視差画像に含まれる前記空域の各単位領域の境界に関する各境界領域属性を導出し、前記各単位領域のうちから前記飛行体に関係する特定の単位領域を識別する単位領域識別部と、
前記特定の単位領域に対応する前記飛行体の特定の境界領域属性と、前記特定の単位領域の範囲及び方位角と、を学習モデルに入力し、前記学習モデルを用いて前記飛行体の多次元的な姿勢を推定する姿勢算出部と、
推定された前記飛行体の多次元的な姿勢に基づいて潜在的なリスクが存在するか否かを判断するリスク推定部と、
前記リスク推定部の判断結果に基づいて、警告通知を生成する警告通知生成部と、
前記警告通知生成部が生成した前記警告通知を出力するとともに、前記警告通知に応じた前記飛行体の挙動に応じて再度警告通知を出力しうる出力部と、
を備えることを特徴とする飛行体制御システム。
【請求項10】
取得部に、空域において検知される飛行体について、所定期間内に複数回取得される前記空域内の空域環境データが入力されるデータ取得ステップと、
単位領域識別部が、各前記空域環境データに基づく前記空域の視差画像に含まれる前記空域の各単位領域の境界に関する各境界領域属性を導出し、前記各単位領域のうちから前記飛行体に関係する特定の単位領域を識別する単位領域識別ステップと、
姿勢算出部が、前記特定の単位領域に対応する前記飛行体の特定の境界領域属性と、前記特定の単位領域の範囲及び方位角と、を学習モデルに入力し、前記学習モデルを用いて前記飛行体の3次元的な姿勢を推定する姿勢算出ステップと、
を有することを特徴とする飛行体検知方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、空域内の飛行体を検知する飛行体検知装置、飛行体検知方法、及び飛行体制御システムに適用して好適なものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、UAV(Urban Air Vehicle)のような小型の飛行体(以下、単に「飛行体」と総称する)を用いた空中での交通や輸送(以下、単に「交通」と総称する)が検討されつつある。飛行体が広く使用される時代においては、安全とセキュリティを確保するため、空域における飛行体の検知は重要な要素である。飛行体の検知方法として、例えば、特許文献1には、ステレオカメラを用いて立体的に検出された物体領域の属性に基づいて物体姿勢を推定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
豪州出願公開第2023203521号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された技術では、飛行体の検知精度を高めるよう諸条件に応じてステレオカメラについてキャリブレーションを行うことが困難である。そのため、飛行体の検知の精度について信頼性が確保できず、空域内の飛行体の交通を安全に制御することができなかった。
【0005】
本発明は、以上の点を鑑み、空域内の飛行体の交通を安全に制御することができる飛行体検知装置、飛行体検知方法、及び飛行体制御システムの提供を目的とする。
【課題を解決するための手段】
【0006】
かかる課題を解決するため本発明においては、空域において検知される飛行体について、所定期間内に複数回取得される前記空域内の空域環境データが入力される取得部と、各前記空域環境データに基づく前記空域の視差画像に含まれる前記空域の各単位領域の境界に関する各境界領域属性を導出し、前記各単位領域のうちから前記飛行体に関係する特定の単位領域を識別する単位領域識別部と、前記特定の単位領域に対応する前記飛行体の特定の境界領域属性と、前記特定の単位領域の範囲及び方位角と、を学習モデルに入力し、前記学習モデルを用いて前記飛行体の多次元的な姿勢を推定する姿勢算出部と、を備えるようにした。
【0007】
また、本発明においては、取得部に、空域において検知される飛行体について、所定期間内に複数回取得される前記空域内の空域環境データが入力されるデータ取得ステップと、単位領域識別部が、各前記空域環境データに基づく前記空域の視差画像に含まれる前記空域の各単位領域の境界に関する各境界領域属性を導出し、前記各単位領域のうちから前記飛行体に関係する特定の単位領域を識別する単位領域識別ステップと、姿勢算出部が、前記特定の単位領域に対応する前記飛行体の特定の境界領域属性と、前記特定の単位領域の範囲及び方位角と、を学習モデルに入力し、前記学習モデルを用いて前記飛行体の3次元的な姿勢を推定する姿勢算出ステップと、を有するようにした。
【0008】
また、本発明においては、空域を飛行する飛行体と、前記飛行体を検知する飛行体検知装置と、を備え、前記飛行体検知装置は、空域において検知される飛行体について、所定期間内に複数回取得される前記空域内の空域環境データが入力される取得部と、各前記空域環境データに基づく前記空域の視差画像に含まれる前記空域の各単位領域の境界に関する各境界領域属性を導出し、前記各単位領域のうちから前記飛行体に関係する特定の単位領域を識別する単位領域識別部と、前記特定の単位領域に対応する前記飛行体の特定の境界領域属性と、前記特定の単位領域の範囲及び方位角と、を学習モデルに入力し、前記学習モデルを用いて前記飛行体の多次元的な姿勢を推定する姿勢算出部と、推定された前記飛行体の多次元的な姿勢に基づいて潜在的なリスクが存在するか否かを判断するリスク推定部と、前記リスク推定部の判断結果に基づいて、警告通知を生成する警告通知生成部と、前記警告通知生成部が生成した前記警告通知を出力するとともに、前記警告通知に応じた前記飛行体の挙動に応じて再度警告通知を出力しうる出力部と、を備えるようにした。
【発明の効果】
【0009】
本発明によれば、空域内の飛行体の交通を安全に制御することができる。
【図面の簡単な説明】
【0010】
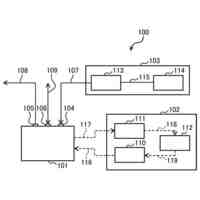
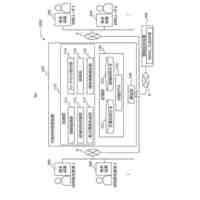
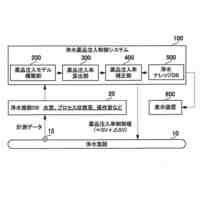
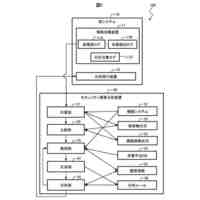
本実施形態による飛行体検知装置を含む飛行体制御システムの構成例を示す概念図である。
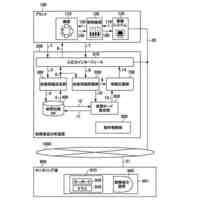
図1に示す飛行体検知装置等のハードウェア構成の一例を示すブロック図である。
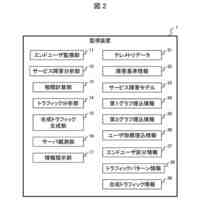
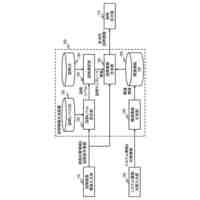
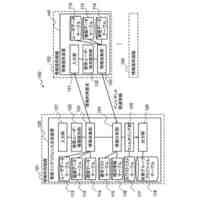
本実施形態による飛行体検知装置のソフトウェア構成例を示す図である。
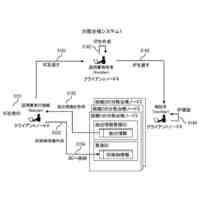
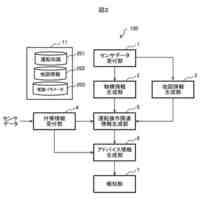
主として飛行体検知装置によるデータ処理の一例を示す概念図である。
本実施形態による飛行体検知装置の変形例を示す図である。
モデルの学習方法の一例を示す概念図である。
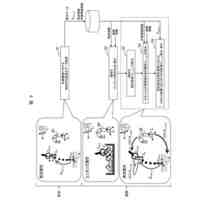
飛行体を利用して荷物を配達する様子の一例を示す図である。
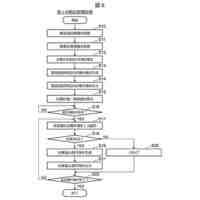
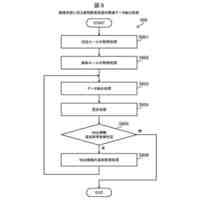
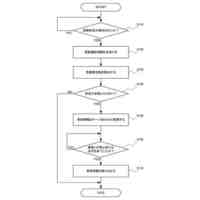
飛行体検知処理の手順の一例を示すフローチャートである。
飛行体検知処理の手順の他の一例を示すフローチャートである。
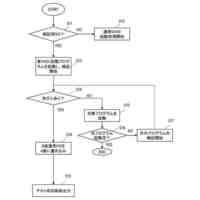
リスク推定処理の手順の一例を示すフローチャートである。
警告事象が発生している画面の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
部品管理装置及び方法
2日前
株式会社日立製作所
情報処理装置、情報処理方法
4日前
株式会社日立製作所
蒸発乾固装置および蒸発乾固方法
3日前
株式会社日立製作所
情報処理システム、及び情報処理方法
4日前
株式会社日立製作所
情報処理システム、及び情報処理方法
2日前
株式会社日立製作所
故障要因分析装置及び故障要因分析方法
3日前
株式会社日立製作所
説明情報生成装置及び説明情報生成方法
3日前
株式会社日立製作所
臨床試験計画装置および臨床試験計画方法
4日前
株式会社日立製作所
クラウドデータベースシステム及びデータ管理方法
4日前
株式会社日立製作所
ストレージシステム及びストレージシステムの制御方法
3日前
株式会社日立製作所
速度異常検出装置、乗客コンベア及び速度異常検出方法
4日前
株式会社日立製作所
水電解システムの運用装置及び水電解システムの運用方法
3日前
株式会社日立製作所
飛行体検知装置、飛行体検知方法、及び飛行体制御システム
2日前
株式会社日立製作所
代替材料提案システム、代替材料提案方法およびプログラム
4日前
株式会社日立製作所
ロボット制御装置、ロボット、及び、ロボット制御システム
3日前
株式会社日立製作所
情報処理方法、情報処理プログラム、及び情報処理システム
2日前
株式会社日立製作所
自動画面操作テスト支援装置及び自動画面操作テスト支援方法
3日前
株式会社日立製作所
障害分析システム、障害分析方法、及び障害分析モデル生成方法
2日前
株式会社日立製作所
データ連動システム、データ連動方法及びデータ連動プログラム
2日前
株式会社日立製作所
ロジックモデル作成支援装置およびロジックモデル作成支援方法
4日前
株式会社日立製作所
栄養塩類徐放性ブロックの製造方法および栄養塩類徐放性ブロック
3日前
株式会社日立製作所
ロボット管理装置、ロボット管理システムおよびロボット管理方法
3日前
株式会社日立製作所
浄水薬品注入制御システム、浄水薬品注入制御方法、及びプログラム
3日前
株式会社日立製作所
脅威インテリジェンス生成装置、及び脅威インテリジェンス生成方法
3日前
株式会社日立製作所
ロボットの動作学習装置、動作学習システム、および、動作学習方法
2日前
株式会社日立製作所
治療選択支援装置、治療選択支援方法、および治療選択支援プログラム
2日前
株式会社日立製作所
運転支援装置、車両、運転支援システム、運転教育システム、及び運転支援方法
4日前
株式会社日立製作所
計画立案システム、生産管理システム、計画立案方法、および計画立案プログラム
3日前
株式会社日立製作所
電力貯蔵装置監視システム及び電力貯蔵装置監視方法、並びに、電力貯蔵システム
3日前
株式会社日立製作所
セキュリティ侵害分析装置、セキュリティ侵害分析方法、及びセキュリティ分析システム
2日前
株式会社日立製作所
ストレージコントローラにおいて実行されるソフトウェアの起動における改ざん検証のテストを行うシステム
2日前
日本精機株式会社
警報システム
1か月前
日本精機株式会社
路面投影装置
3か月前
株式会社SUBARU
車両
3日前
個人
自動電動車椅子
24日前
エムケー精工株式会社
車両誘導装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ