TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133862
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2025112824,2022059517
出願日
2025-07-03,2022-03-31
発明の名称
走行制御方法、走行制御システム、作業車両、及び走行制御プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250904BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行及び手動走行を切り替え可能な作業車両におけるオペレータの操作性を向上させることが可能な走行制御方法、走行制御システム、作業車両、及び走行制御プログラムを提供する。
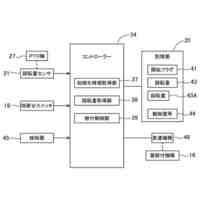
【解決手段】受付処理部112は、作業車両10に所定の動作を実行させる操作具に対するオペレータの操作を受け付ける。動作処理部114は、作業車両10に前記操作具に対するオペレータの操作に応じた動作を実行させる。走行処理部111は、前記操作具に対するオペレータの第1操作が受け付けられた場合に作業車両10を自動走行させ、前記操作具に対するオペレータの第2操作が受け付けられた場合に作業車両10を手動走行させる。
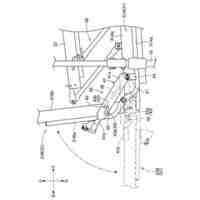
【選択図】図1
特許請求の範囲
【請求項1】
自動操舵による自動走行とオペレータの手動操舵による手動走行とを切り替え可能な作業車両の走行を制御する走行制御方法であって、
前記作業車両に所定の動作を実行させる操作具に対するオペレータの操作を受け付けることと、
前記作業車両に前記操作具に対するオペレータの操作に応じた動作を実行させることと、
前記操作具に対するオペレータの第1操作が受け付けられた場合に前記作業車両を自動走行させ、前記操作具に対するオペレータの第2操作が受け付けられた場合に前記作業車両を手動走行させることと、
を実行する走行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を走行させる走行制御方法、走行制御システム、作業車両、及び走行制御プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
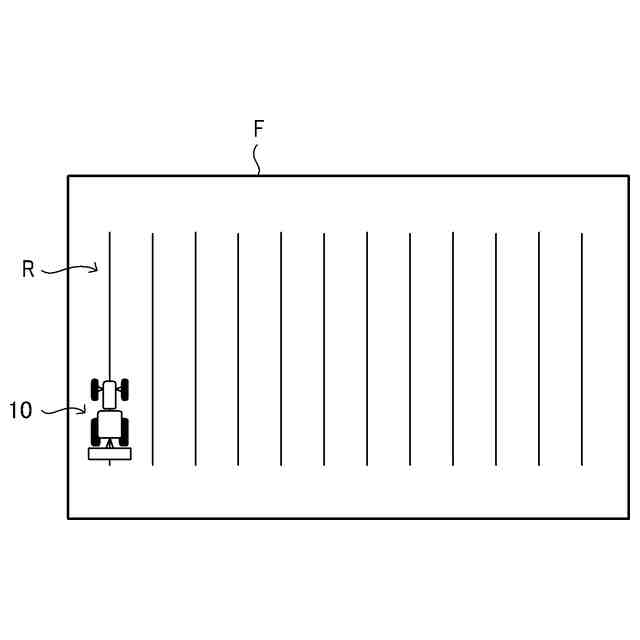
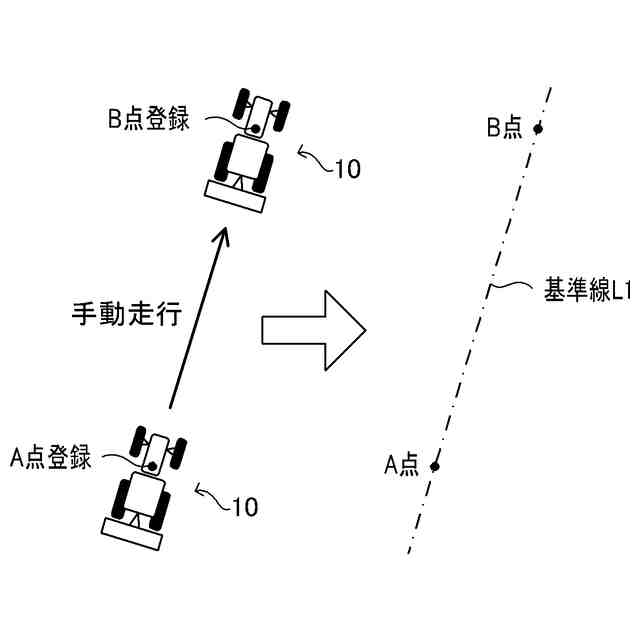
従来、自動走行可能な作業車両として、直進時のみ自動走行を行い、旋回時においてはオペレータによる手動操舵(手動操作)に応じて走行(手動走行)を行う作業車両が知られている。例えば、特許文献1には、自動走行中の作業車両が直進経路から旋回経路に移行する地点に到達したときに自動走行を終了させ、オペレータの手動操舵による旋回走行が終了後、次の直進経路に進入したときにオペレータが自動走行用の操作スイッチをONに切り替えた場合に自動走行を開始する構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-208424号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
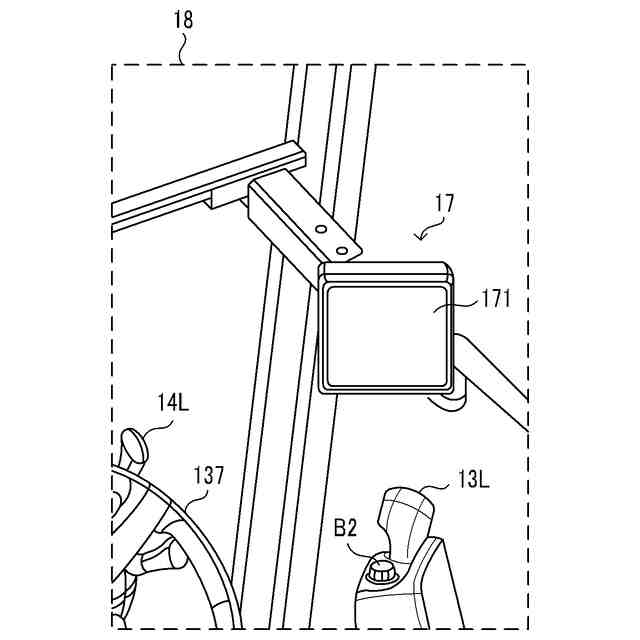
従来の技術では、オペレータは、作業車両を手動走行から自動走行に切り替える場合に、手動操舵を行いながら、自動走行及び手動走行を切り替えるための操作スイッチを操作する必要があるため、オペレータによる操作が煩雑になる。特に、昇降可能な作業機を備える作業車両においては、オペレータは、手動操舵による旋回終了時に前記操作スイッチの操作に加えて、作業機を下ろす操作が必要になりさらに煩雑になる。
【0005】
本発明の目的は、自動走行及び手動走行を切り替え可能な作業車両におけるオペレータの操作性を向上させることが可能な走行制御方法、走行制御システム、作業車両、及び走行制御プログラムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る走行制御方法は、自動操舵による自動走行とオペレータの手動操舵による手動走行とを切り替え可能な作業車両の走行を制御する走行制御方法である。前記走行制御方法は、前記作業車両に所定の動作を実行させる操作具に対するオペレータの操作を受け付けることと、前記作業車両に前記操作具に対するオペレータの操作に応じた動作を実行させることと、前記操作具に対するオペレータの第1操作が受け付けられた場合に前記作業車両を自動走行させ、前記操作具に対するオペレータの第2操作が受け付けられた場合に前記作業車両を手動走行させることと、を実行する。
【0007】
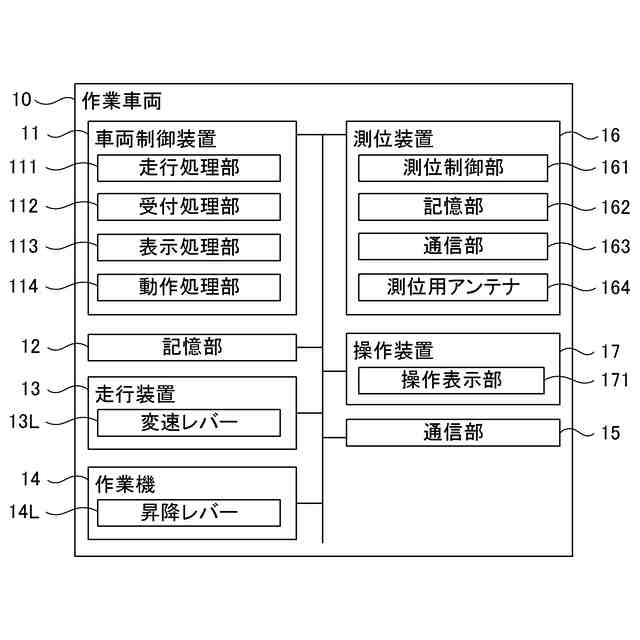
本発明に係る走行制御システムは、自動操舵による自動走行とオペレータの手動操舵による手動走行とを切り替え可能な作業車両の走行を制御する。前記走行制御システムは、受付処理部と動作処理部と走行処理部とを備える。前記受付処理部は、前記作業車両に所定の動作を実行させる操作具に対するオペレータの操作を受け付ける。前記動作処理部は、前記作業車両に前記操作具に対するオペレータの操作に応じた動作を実行させる。前記走行処理部は、前記操作具に対するオペレータの第1操作が受け付けられた場合に前記作業車両を自動走行させ、前記操作具に対するオペレータの第2操作が受け付けられた場合に前記作業車両を手動走行させる。
【0008】
本発明に係る作業車両は、自動操舵による自動走行とオペレータの手動操舵による手動走行とを切り替え可能な作業車両である。前記作業車両は、操作具と制御部とを備える。前記操作具は、オペレータの操作に応じて、前記作業車両に所定の動作を実行させる。前記制御部は、前記操作具に対するオペレータの第1操作が受け付けられた場合に、前記作業車両に第1動作を実行させるとともに自動走行させ、前記操作具に対するオペレータの第2操作が受け付けられた場合に前記作業車両に第2動作を実行させるとともに手動走行させる。
【0009】
本発明に係る走行制御プログラムは、自動操舵による自動走行とオペレータの手動操舵による手動走行とを切り替え可能な作業車両の走行を制御する走行制御プログラムである。前記走行制御プログラムは、前記作業車両に所定の動作を実行させる操作具に対するオペレータの操作を受け付けることと、前記作業車両に前記操作具に対するオペレータの操作に応じた動作を実行させることと、前記操作具に対するオペレータの第1操作が受け付けられた場合に前記作業車両を自動走行させ、前記操作具に対するオペレータの第2操作が受け付けられた場合に前記作業車両を手動走行させることと、を一又は複数のプロセッサーに実行させるための走行制御プログラムである。
【発明の効果】
【0010】
本発明によれば、自動走行及び手動走行を切り替え可能な作業車両におけるオペレータの操作性を向上させることが可能な走行制御方法、走行制御システム、作業車両、及び走行制御プログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
播種装置
1か月前
個人
巻糸係止具
7日前
個人
虫の生け捕り具
26日前
個人
植物栽培用培地
18日前
個人
植木鉢用台
14日前
個人
釣り仕掛け処理具
13日前
個人
養殖システム
1か月前
株式会社シマノ
釣竿
1か月前
井関農機株式会社
作業車両
1か月前
岡部株式会社
浮魚礁
26日前
井関農機株式会社
圃場作業機
7日前
井関農機株式会社
収穫作業車両
27日前
個人
苔玉スタンド
14日前
中国電力株式会社
巣撤去具
24日前
個人
漁業支援装置及び方法
1か月前
ウエダ産業株式会社
切断装置
1か月前
松山株式会社
農作業機
14日前
松山株式会社
農作業機
14日前
松山株式会社
農作業機
14日前
株式会社シマノ
ルアー
19日前
みのる産業株式会社
苗植付装置
11日前
みのる産業株式会社
苗植付装置
11日前
個人
給水方法及びこれを用いた給水装置
12日前
第一衛材株式会社
ペット用おむつ
24日前
OTIS株式会社
ルアー用スカート
1か月前
一般社団法人NAGOYA
電子機器
11日前
株式会社クボタ
田植機
7日前
株式会社クボタ
作業機
6日前
株式会社クボタ
田植機
7日前
株式会社クボタ
作業車
6日前
株式会社ササキコーポレーション
農作業機
1か月前
個人
大型ペット用安定供給水やりシステム
21日前
トヨタ自動車株式会社
植物栽培装置
5日前
株式会社クボタ
田植機
10日前
三菱マヒンドラ農機株式会社
農業用作業車両
12日前
三菱マヒンドラ農機株式会社
農業用作業車両
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ