TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025130954
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028370
出願日
2024-02-28
発明の名称
農作業機用制御システム
出願人
松山株式会社
代理人
弁理士法人第一国際特許事務所
主分類
A01B
63/111 20060101AFI20250902BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】トラクタに装着する作業機の耕耘作業において運土量を含む的確な制御ができる農作業機用制御システムを提供することを目的とする。
【解決手段】トラクタ1に装着して耕耘作業を行うロータリー作業機50と、トラクタ1に配置され高さと位置の情報を取得可能な高さ位置情報取得部31と、ロータリー作業機50に備えるセンサ25と、ロータリー作業機50に備える作業機制御部21とを備え、ロータリー作業機50は、耕耘作業を行う耕耘部60と、耕耘部60の上側を覆う耕耘部カバー56と、耕耘部60の後ろ側に位置し耕耘部カバー56に対して回動可能に取り付けられた整地体57を備え、作業機制御部21は、高さ位置情報取得部31からの情報と、センサ25からの情報を用いて、ロータリー作業機50の耕耘前の地表面の高さと耕耘後の地表面の高さの差を算出することで、耕耘部60と整地体57との間で保持する土の量である運土量を算出する。
【選択図】図11
特許請求の範囲
【請求項1】
トラクタに装着して耕耘作業を行うロータリー作業機と、前記トラクタに配置され高さと位置の情報を取得可能な高さ位置情報取得部と、前記ロータリー作業機に備えるセンサと、前記ロータリー作業機に備える作業機制御部とを備え、
前記ロータリー作業機は、耕耘作業を行う耕耘部と、前記耕耘部の上側を覆う耕耘部カバーと、前記耕耘部の後ろ側に位置し前記耕耘部カバーに対して回動可能に取り付けられた整地体を備え、
前記作業機制御部は、前記高さ位置情報取得部からの情報と、前記センサからの情報を用いて、前記ロータリー作業機の耕耘前の地表面の高さと耕耘後の地表面の高さの差を算出することで、前記耕耘部と前記整地体との間で保持する土の量である運土量を算出することを特徴とする農作業機用制御システム。
続きを表示(約 1,500 文字)
【請求項2】
トラクタに装着して耕耘作業を行うロータリー作業機と、前記ロータリー作業機に配置され高さと位置の情報を取得可能な高さ位置情報取得部と、前記ロータリー作業機に備えるセンサと、前記ロータリー作業機に備える作業機制御部とを備え、
前記ロータリー作業機は、耕耘作業を行う耕耘部と、前記耕耘部の上側を覆う耕耘部カバーと、前記耕耘部の後ろ側に位置し前記耕耘部カバーに対して回動可能に取り付けられた整地体を備え、
前記作業機制御部は、前記高さ位置情報取得部からの情報と、前記センサからの情報を用いて、前記ロータリー作業機の耕耘前の地表面の高さと耕耘後の地表面の高さの差を算出することで、前記耕耘部と前記整地体との間で保持する土の量である運土量を算出することを特徴とする農作業機用制御システム。
【請求項3】
請求項1に記載の農作業機用制御システムにおいて、
前記センサは、第1のセンサと、第2のセンサとを有し、
前記第1のセンサは、前記トラクタに対する前記ロータリー作業機の高さを検出するためのセンサであり、
前記第2のセンサは、前記整地体の回動角度を検知するセンサであることを特徴とする農作業機用制御システム。
【請求項4】
請求項3に記載の農作業機用制御システムにおいて、
前記ロータリー作業機の耕耘前の地表面の高さは、前記高さ位置情報取得部からの情報を用いて算出し、前記ロータリー作業機の耕耘後の地表面の高さは、前記高さ位置情報取得部と前記第1のセンサと前記第2のセンサからの情報を用いて前記整地体の下端部の高さを算出し、前記整地体の下端部の高さを耕耘後の地表面の高さとすることを特徴とする農作業機用制御システム。
【請求項5】
請求項2に記載の農作業機用制御システムにおいて、
前記センサは、第1のセンサと、第2のセンサとを有し、
前記第1のセンサは、前記ロータリー作業機に対する耕耘前の地表面の高さを検出するためのセンサであり、
前記第2のセンサは、前記整地体の回動角度を検知するセンサであることを特徴とする農作業機用制御システム。
【請求項6】
請求項5に記載の農作業機用制御システムにおいて、
前記ロータリー作業機の耕耘前の地表面の高さは、前記高さ位置情報取得部と前記第1のセンサからの情報を用いて算出し、前記ロータリー作業機の耕耘後の地表面の高さは、前記高さ位置情報取得部と前記第2のセンサからの情報を用いて前記整地体の下端部の高さを算出し、前記整地体の下端部の高さを耕耘後の地表面の高さとすることを特徴とする農作業機用制御システム。
【請求項7】
請求項1又は請求項2に記載の農作業機用制御システムにおいて、
前記ロータリー作業機に前記整地体の下端部を下側に向けて付勢する力を変更可能な加圧装置を備え、
前記作業機制御部は、前記高さ位置情報取得部からの情報と、前記センサからの情報を用いて、前記ロータリー作業機の耕耘後の地表面の高さが目標高さになるように前記加圧装置の付勢力を制御することを特徴とする農作業機用制御システム。
【請求項8】
請求項1又は請求項2に記載の農作業機用制御システムにおいて、
前記ロータリー作業機に前記整地体の下端部を下側に向けて付勢する力を変更可能な加圧装置を備え、
前記作業機制御部は、算出した運土量があらかじめ定めた上限値以上になった場合は前記加圧装置の付勢力を弱め、算出した運土量があらかじめ定めた下限値以下になった場合は前記加圧装置の付勢力を強める制御を行うことを特徴とする農作業機用制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農作業機用制御システムに関し、特に、トラクタに装着する作業機に関する制御ができる農作業機用制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
トラクタに装着して農作業を行う作業機は、その作業高さを制御することにより、適切な農作業を行うことができる。特に耕耘作業においては、土の量や耕耘後の地表面の高さを制御することが望ましい。例えば、地表面と接する整地体と耕耘部の位置が一定になるように制御するオート装置を用いる場合がある。
【0003】
また特許文献1には、ロータリー作業部よりも前方に配設されて圃場の凹凸高さを検出する凹凸検出手段と、整地体を回動させる回動手段と、凹凸検出手段によって検出された検出結果に基づいて回動手段の作動を制御する回動制御手段とを有する農作業機について開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2009-131173号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述したオート装置を用いる場合は、整地体は地表面の凹凸に沿って上下動するため、圃場の地表面の高さを一定に制御するのが難しい場合が存在する。
【0006】
また、特許文献1に開示する構成だと、運土量については、考慮しておらず、ロータリー作業時に土を抱え込みすぎて土が漏れ出し、正確な均平作業を行えない場合がある。さらに、最初の接地位置の高さ設定に基づいて均平作業を行うため、圃場全体で土を抱え込み続けてしまう可能性がある。
【0007】
本発明は、上記課題に鑑みて、トラクタに装着する作業機の耕耘作業において運土量を含む的確な農作業に貢献できる農作業機用制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、代表的な本発明の農作業機用制御システムの一つは、トラクタに装着して耕耘作業を行うロータリー作業機と、前記トラクタに配置され高さと位置の情報を取得可能な高さ位置情報取得部と、前記ロータリー作業機に備えるセンサと、前記ロータリー作業機に備える作業機制御部とを備え、前記ロータリー作業機は、耕耘作業を行う耕耘部と、前記耕耘部の上側を覆う耕耘部カバーと、前記耕耘部の後ろ側に位置し前記耕耘部カバーに対して回動可能に取り付けられた整地体を備え、前記作業機制御部は、前記高さ位置情報取得部からの情報と、前記センサからの情報を用いて、前記ロータリー作業機の耕耘前の地表面の高さと耕耘後の地表面の高さの差を算出することで、前記耕耘部と前記整地体との間で保持する土の量である運土量を算出することを特徴とする。
【発明の効果】
【0009】
本発明によれば、トラクタに装着する作業機の耕耘作業において、運土量を含む的確な農作業に貢献できる。
上記以外の課題、構成及び効果は、以下の実施形態により明らかにされる。
【図面の簡単な説明】
【0010】
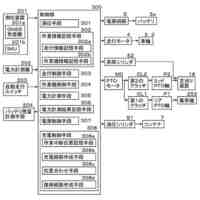
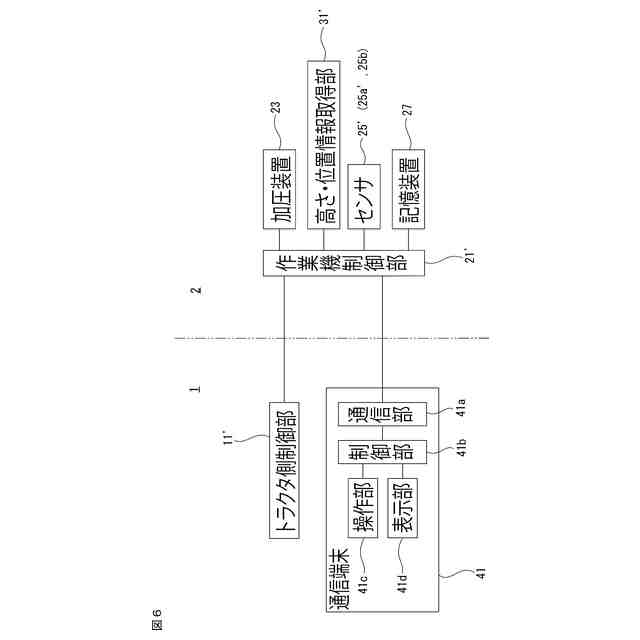
本発明の農作業機用制御システムの第1の実施形態のブロック図である。
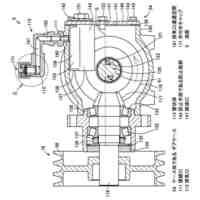
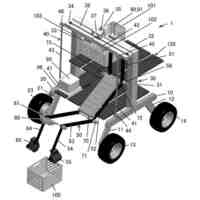
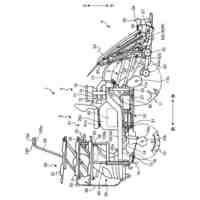
本発明の第1の実施形態に適用可能な作業機を示す側面図である。
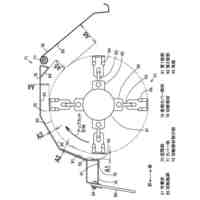
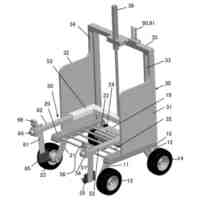
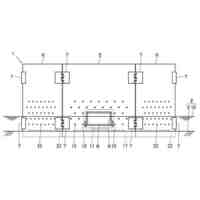
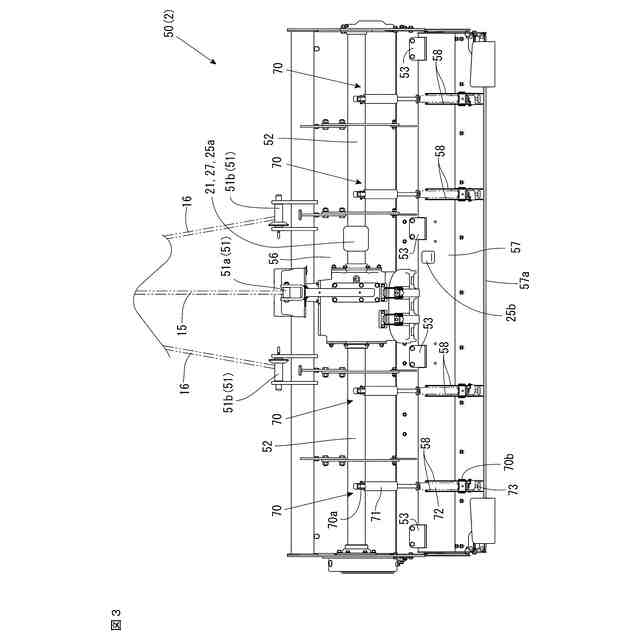
本発明の第1の実施形態に適用可能な作業機を示す平面図である。
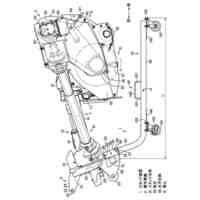
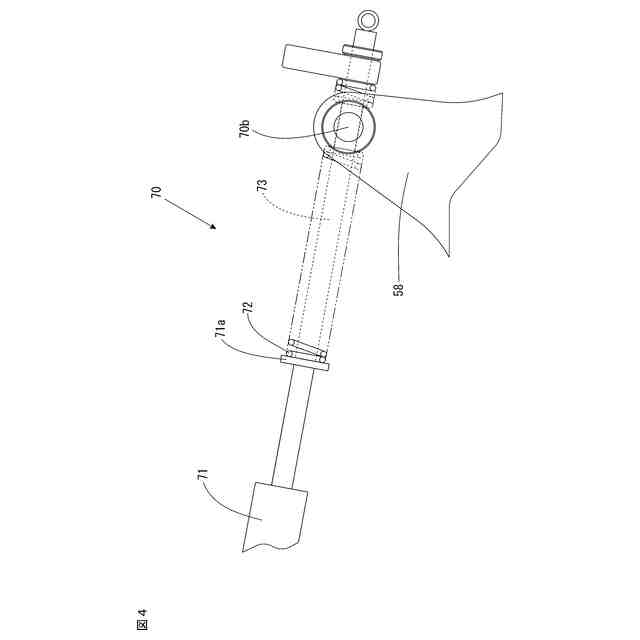
本発明の第1の実施形態に適用可能な作業機における加圧装置の拡大図を示す。
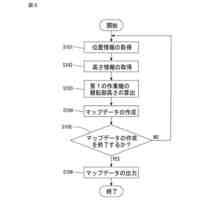
本発明の第1の実施形態の加圧制御のフローチャートを示す。
本発明の農作業機用制御システムの第2の実施形態のブロック図である。
本発明の第2の実施形態に適用可能な作業機を示す側面図である。
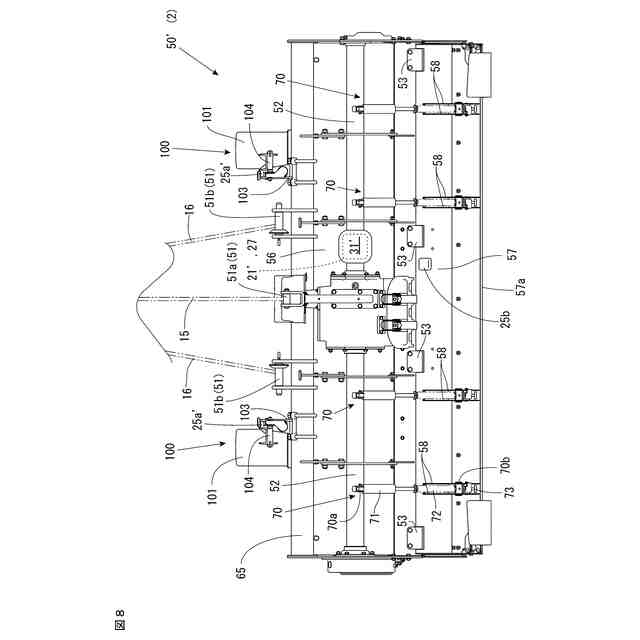
本発明の第2の実施形態に適用可能な作業機を示す平面図である。
本発明の第2の実施形態の加圧制御のフローチャートを示す。
本発明の農作業機用制御システムの運土量制御の一例を示す説明図である。
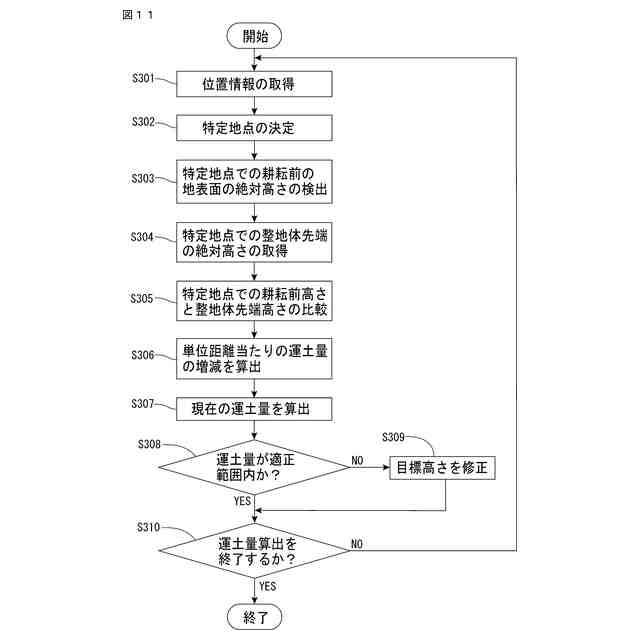
本発明の農作業機用制御システムの運土量算出の一例を示すフローチャートである。
本発明の農作業機用制御システムの運土管理の一例を示す説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
松山株式会社
農作業機
9日前
松山株式会社
農作業機
23日前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
松山株式会社
草刈作業機
3か月前
松山株式会社
スタンド装置
3か月前
松山株式会社
農作業機用制御システム
1か月前
松山株式会社
農作業機用高さ制御システム
4か月前
松山株式会社
農作業機用制御システム及び農作業方法
1か月前
個人
虫捕り器
13日前
個人
巻糸係止具
1か月前
個人
刈込鋏保持具
9日前
個人
飼育容器
23日前
個人
後付巻降ろし器
13日前
個人
イカ釣り用ヤエン
13日前
個人
釣り仕掛け処理具
1か月前
株式会社丹勝
緑化工法
10日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
3日前
株式会社シマノ
釣竿
13日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
13日前
個人
水耕栽培システム
23日前
井関農機株式会社
圃場作業機
1か月前
大栄工業株式会社
捕獲器
3日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
9日前
個人
伸縮する草刈り機の可動装置。
13日前
松山株式会社
農作業機
23日前
個人
妻面トラス梁付き園芸用ハウス
25日前
松山株式会社
農作業機
9日前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ