TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087999
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202377
出願日
2023-11-30
発明の名称
農作業機用高さ制御システム
出願人
松山株式会社
代理人
弁理士法人第一国際特許事務所
主分類
A01B
63/102 20060101AFI20250604BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】追加が容易で汎用性をより高くした農作業機用高さ制御システムを提供することを目的とする。
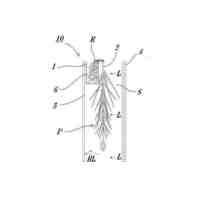
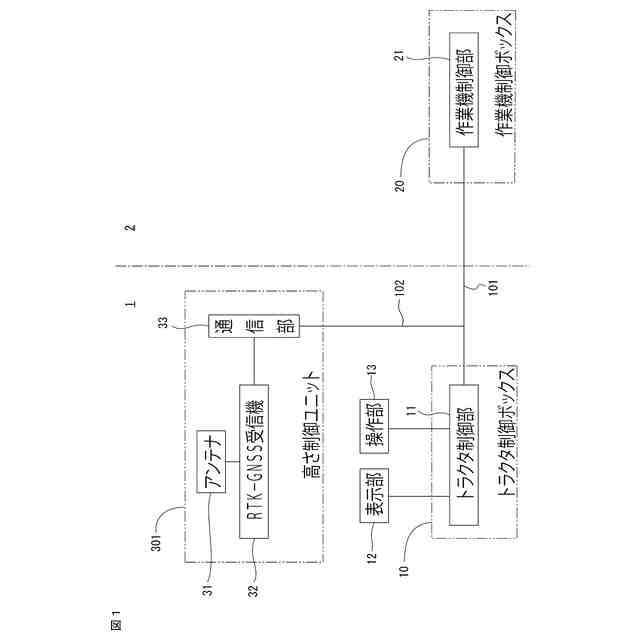
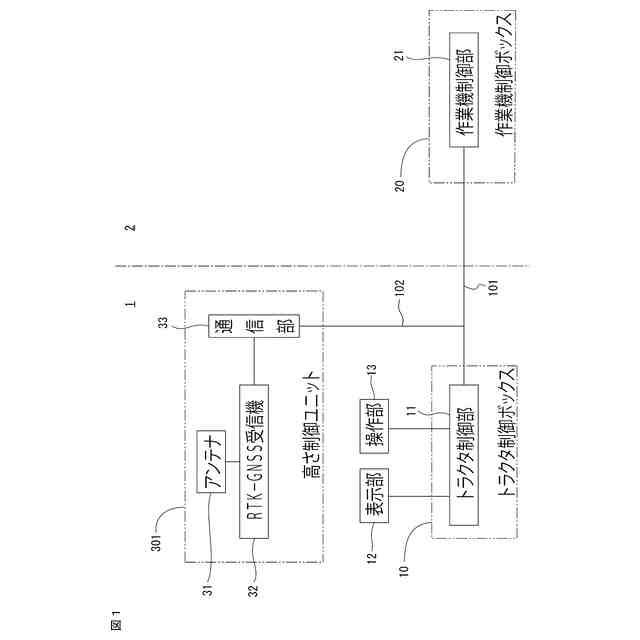
【解決手段】トラクタ1に装着して農作業を行う作業機2に適用する農作業機用高さ制御システムにおいて、トラクタ1に備えるトラクタ制御部11と、作業機2に備える作業機制御部21と、トラクタ1に配置されるアンテナ31と、トラクタ1に配置される受信機32を備え、作業機制御部21は、アンテナ31が受信した信号に基づき受信機32からトラクタ1の高さの情報を取得し、取得した情報に基づきトラクタ1に対する作業機2の高さを算出し、算出した情報に基づきトラクタ制御部11に作業機2の高さを制御する信号を送信し、トラクタ制御部11は、受信した高さを制御する信号に基づきトラクタ1に対する作業機2の高さを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
トラクタに装着して農作業を行う作業機に適用する農作業機用高さ制御システムにおいて、
前記トラクタに備えるトラクタ制御部と、前記作業機に備える作業機制御部と、前記トラクタに配置されるアンテナと、前記トラクタに配置される受信機を備え、
前記作業機制御部は、前記アンテナが受信した信号に基づき前記受信機から前記トラクタの高さの情報を取得し、取得した情報に基づき前記トラクタに対する前記作業機の高さを算出し、算出した情報に基づき前記トラクタ制御部に前記作業機の高さを制御する信号を送信し、
前記トラクタ制御部は、受信した高さを制御する信号に基づき前記トラクタに対する前記作業機の高さを制御することを特徴とする農作業機用高さ制御システム。
続きを表示(約 1,400 文字)
【請求項2】
トラクタに装着して農作業を行う作業機に適用する農作業機用高さ制御システムにおいて、
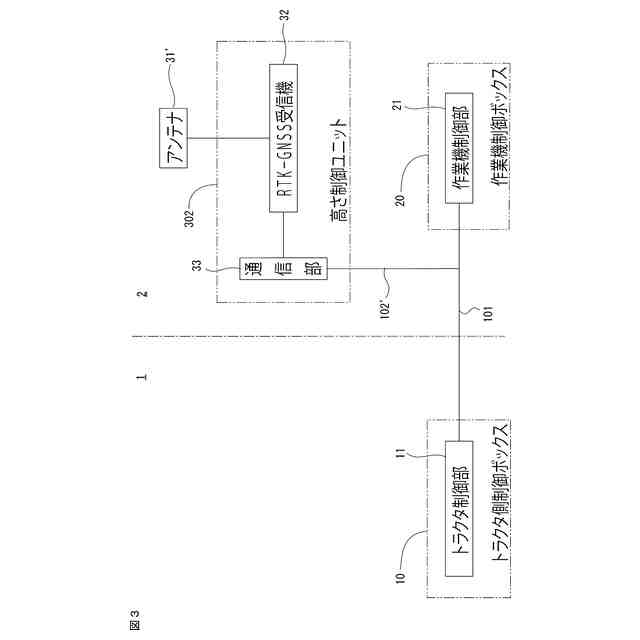
前記トラクタに備えるトラクタ制御部と、前記作業機に備える作業機制御部と、前記作業機に配置されるアンテナと、前記作業機に配置される受信機を備え、
前記作業機制御部は、前記アンテナが受信した信号に基づき前記受信機から前記作業機の高さの情報を取得し、取得した情報に基づき前記トラクタに対する前記作業機の高さを算出し、算出した情報に基づき前記トラクタ制御部に前記作業機の高さを制御する信号を送信し、
前記トラクタ制御部は、受信した高さを制御する信号に基づき前記トラクタに対する前記作業機の高さを制御することを特徴とする農作業機用高さ制御システム。
【請求項3】
トラクタに装着して農作業を行う作業機に適用する農作業機用高さ制御システムにおいて、
前記トラクタに備えるトラクタ制御部と、前記作業機に備える作業機制御部と、前記作業機に配置されるアンテナと、前記作業機に配置される受信機と、前記作業機に配置される高さ管理手段制御部とを備え、
前記高さ管理手段制御部は、前記アンテナが受信する信号とは別の手段により前記作業機の高さを検知し、
前記作業機制御部は、前記アンテナが受信した信号に基づき前記受信機から前記作業機の高さの情報を取得するとともに、前記高さ管理手段制御部から前記作業機の高さの情報を取得し、取得した情報に基づき前記トラクタに対する前記作業機の高さを算出し、算出した情報に基づき前記トラクタ制御部に前記作業機の高さを制御する信号を送信し、
前記トラクタ制御部は、受信した高さを制御する信号に基づき前記トラクタに対する前記作業機の高さを制御することを特徴とする農作業機用高さ制御システム。
【請求項4】
請求項1に記載の農作業機用高さ制御システムにおいて、
前記トラクタに配置される通信部を備え、前記通信部は、前記受信機からの情報を前記トラクタ制御部と前記作業機制御部との間で適用される通信方式に変換する機能を備え、
前記アンテナと前記受信機と前記通信部は1つのユニットとして構成されることを特徴とする農作業機用高さ制御システム。
【請求項5】
請求項1に記載の農作業機用高さ制御システムにおいて、
前記トラクタに配置される前記受信機は、前記作業機制御部と通信が可能で操作部と表示部の少なくともいずれか一方を備える通信端末に設けられていることを特徴とする農作業機用高さ制御システム。
【請求項6】
請求項2に記載の農作業機用高さ制御システムにおいて、
前記作業機に配置される通信部を備え、前記通信部は、前記受信機からの情報を前記トラクタ制御部と前記作業機制御部との間で適用される通信方式に変換する機能を備え、
前記受信機と前記通信部は1つのユニットとして構成され、前記アンテナは前記ユニットよりも高い位置に設けられることを特徴とする農作業機用高さ制御システム。
【請求項7】
請求項1から請求項6のいずれか一項に記載の農作業機用高さ制御システムにおいて、
前記アンテナと前記受信機は、RTK-GNSS測位をするためのアンテナと受信機であることを特徴とする農作業機用高さ制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農作業機用高さ制御システムに関し、特に、トラクタに装着して農作業を行う作業機の高さを制御するための農作業機用高さ制御システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
トラクタに装着して農作業を行う作業機は、その作業高さを制御することにより、適切な農作業を行うことができる。例えば、地表面と接する整地体と耕耘部の位置が一定になるように制御するオート装置を用いる場合がある。
【0003】
また特許文献1には、走行車体に装着され、走行車体の位置を測位する車体測位装置と、作業機に装着され、作業機の位置を測位する作業機測位装置を備え、制御装置が路上走行中であると判定すると、車体測位装置の検出値と作業機測位装置の検出値に基づいて、走行車体に対する作業機の位置を予め定められた位置になるように昇降する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-036787号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述したオート装置を用いる場合は、整地体は地表面の凹凸に沿って上下動するため、耕耘部の深さを一定に制御するのが難しい場合が存在する。
【0006】
特許文献1では、あらかじめ設置された車体測位装置と作業機測位装置の2つを前提としており、これらの制御はトラクタ(走行車体)に備える1つの制御装置で制御を行う。このため、後から機能を追加するには、トラクタの制御装置ごと入れ替える必要がある。トラクタの制御装置は、トラクタの様々な制御も行っているため、上記機能の追加には、手間とコストがかかり、様々な機種のトラクタに対して適用するには汎用性が高くない構成となっている。
【0007】
本発明は、上記課題に鑑みて、追加が容易で汎用性をより高くした農作業機用高さ制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、代表的な本発明の農作業機用高さ制御システムの一つは、トラクタに装着して農作業を行う作業機に適用する農作業機用高さ制御システムにおいて、前記トラクタに備えるトラクタ制御部と、前記作業機に備える作業機制御部と、前記トラクタに配置されるアンテナと、前記トラクタに配置される受信機を備え、前記作業機制御部は、前記アンテナが受信した信号に基づき前記受信機から前記トラクタの高さの情報を取得し、取得した情報に基づき前記トラクタに対する前記作業機の高さを算出し、算出した情報に基づき前記トラクタ制御部に前記作業機の高さを制御する信号を送信し、前記トラクタ制御部は、受信した高さを制御する信号に基づき前記トラクタに対する前記作業機の高さを制御することを特徴とする。
【発明の効果】
【0009】
本発明によれば、トラクタに装着して農作業を行う作業機の高さを制御するための農作業機用高さ制御システムにおいて、追加が容易で汎用性をより高くすることができる。
上記以外の課題、構成及び効果は、以下の実施形態により明らかにされる。
【図面の簡単な説明】
【0010】
本発明の農作業機用高さ制御システムの第1の実施形態のブロック図である。
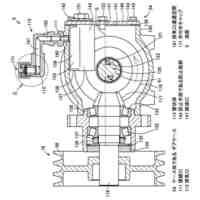
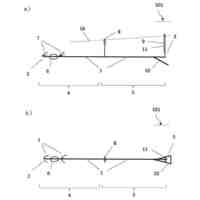
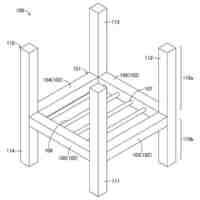
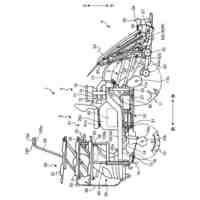
本発明の第1の実施形態に適用可能な作業機を示す側面図である。
本発明の農作業機用高さ制御システムの第2の実施形態のブロック図である。
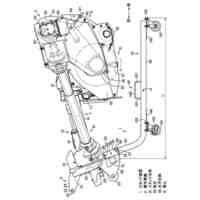
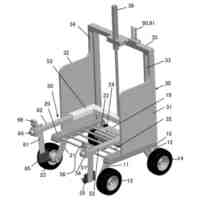
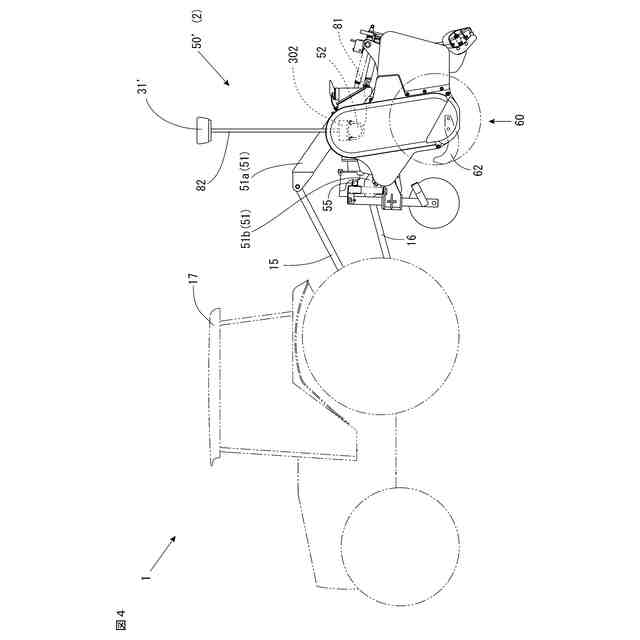
本発明の第2の実施形態に適用可能な作業機を示す側面図である。
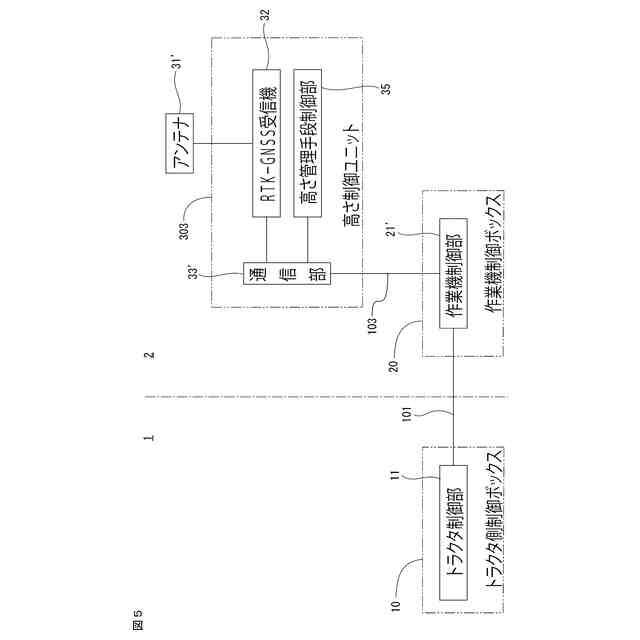
本発明の農作業機用高さ制御システムの第3の実施形態のブロック図である。
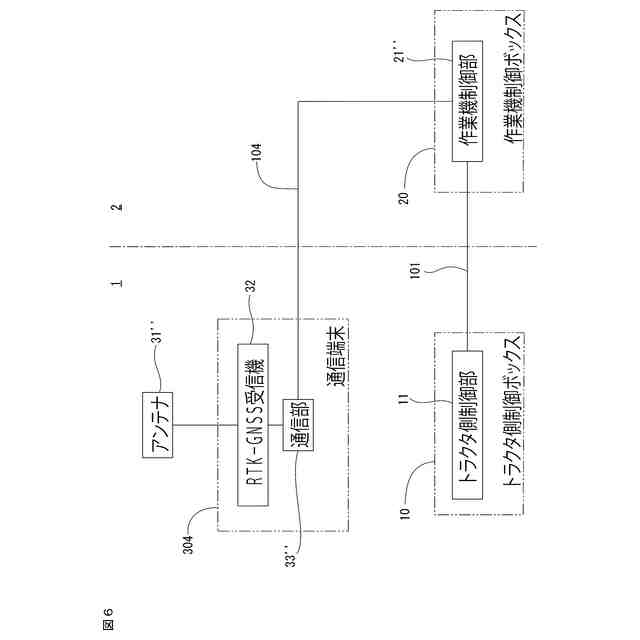
本発明の農作業機用高さ制御システムの第4の実施形態のブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
松山株式会社
農作業機
13日前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
松山株式会社
草刈作業機
2か月前
松山株式会社
スタンド装置
3か月前
松山株式会社
農作業機用制御システム
23日前
松山株式会社
農作業機用制御システム及び農作業方法
1か月前
個人
虫捕り器
3日前
個人
巻糸係止具
24日前
個人
虫の生け捕り具
1か月前
個人
植物栽培用培地
1か月前
個人
飼育容器
13日前
個人
後付巻降ろし器
3日前
個人
イカ釣り用ヤエン
3日前
個人
植木鉢用台
1か月前
個人
釣り仕掛け処理具
1か月前
株式会社丹勝
緑化工法
今日
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
3日前
株式会社シマノ
釣竿
3日前
井関農機株式会社
作業車両
1日前
個人
水耕栽培システム
13日前
井関農機株式会社
圃場作業機
24日前
個人
苔玉スタンド
1か月前
井関農機株式会社
作業車両
13日前
中国電力株式会社
巣撤去具
1か月前
松山株式会社
農作業機
13日前
松山株式会社
農作業機
1か月前
個人
伸縮する草刈り機の可動装置。
3日前
個人
妻面トラス梁付き園芸用ハウス
15日前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
株式会社シマノ
ルアー
1か月前
みのる産業株式会社
苗植付装置
28日前
みのる産業株式会社
苗植付装置
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ