TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130486
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027677
出願日
2024-02-27
発明の名称
ロボット及びアクチュエータユニット
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
H02K
11/00 20160101AFI20250901BHJP(電力の発電,変換,配電)
要約
【課題】アクチュエータに関する情報を表示する表示器をカバーにより覆った場合でも、表示器の表示を外部から可視化できる技術を提供する。
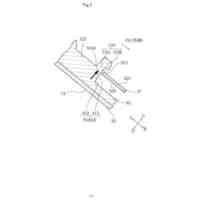
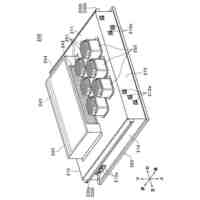
【解決手段】アクチュエータが組み込まれた関節部を有するロボットであって、本体部材14と、本体部材14を覆うカバー16と、を備え、本体部材14には、アクチュエータ22に関する情報を表示しカバー16により覆われる表示器50A、50Bが設けられ、表示器50A、50Bの表示をカバー16の外部から視認可能に構成される。
【選択図】図2
特許請求の範囲
【請求項1】
アクチュエータが組み込まれた関節部を有するロボットであって、
本体部材と、
前記本体部材を覆うカバーと、を備え、
前記本体部材には、前記アクチュエータに関する情報を表示し前記カバーにより覆われる表示器が設けられ、
前記表示器の表示を前記カバーの外部から視認可能に構成されるロボット。
続きを表示(約 660 文字)
【請求項2】
前記カバーは、前記表示器の表示を視認可能となる部位に設けられる光透過部を備える請求項1に記載のロボット。
【請求項3】
前記カバーは、前記光透過部以外の部位に設けられた光不透過部を備える請求項2に記載のロボット。
【請求項4】
前記カバーは、前記表示器の表示を外部から視認するための視認部を備え、
前記表示器の表示を前記視認部に伝送する伝送部を備える請求項1に記載のロボット。
【請求項5】
前記表示器は、複数の表示器を含み、
前記視認部は、前記複数の表示器のそれぞれに対応する複数の視認部を含み、
前記伝送部は、前記複数の表示器それぞれの表示を対応する前記視認部に伝送する複数の伝送部を含む請求項4に記載のロボット。
【請求項6】
前記アクチュエータに関する情報は、前記アクチュエータに関する異常の有無を示す情報である請求項1に記載のロボット。
【請求項7】
前記カバーは、前記本体部材となる前記アクチュエータを前記表示器とともに覆う請求項1に記載のロボット。
【請求項8】
アクチュエータと、
前記アクチュエータを覆うカバーと、を備えるアクチュエータユニットであって、
前記アクチュエータには、前記アクチュエータに関する情報を表示し前記カバーにより覆われる表示器が設けられ、
前記表示器の表示を前記カバーの外部から視認可能に構成されるアクチュエータユニット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット及びアクチュエータユニットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1は、ロボットの関節部に組み込まれるアクチュエータを開示している。
【先行技術文献】
【特許文献】
【0003】
特開2021-97430号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
アクチュエータには、アクチュエータに関する情報を表示する表示器が設けられる場合がある。また、アクチュエータを覆うカバーが設けられる場合もある。アクチュエータを表示器とともにカバーにより覆ってしまうと、せっかく表示器があったとしても、その表示器の表示を外部から視認できなくなるという問題があった。この問題は、ロボットを構成するアクチュエータ等の本体部材に表示器を設け、その表示器をカバーにより覆った場合も共通の問題である。
【0005】
本開示の目的の1つは、アクチュエータに関する情報を表示する表示器をカバーにより覆った場合でも、表示器の表示を外部から可視化できる技術を提供することにある。
【課題を解決するための手段】
【0006】
本開示のロボットは、アクチュエータが組み込まれた関節部を有するロボットであって、本体部材と、前記本体部材を覆うカバーと、を備え、前記本体部材には、前記アクチュエータに関する情報を表示し前記カバーにより覆われる表示器が設けられ、前記表示器の表示を前記カバーの外部から視認可能に構成される。
【0007】
本開示のアクチュエータユニットは、アクチュエータと、前記アクチュエータを覆うカバーと、を備えるアクチュエータユニットであって、前記アクチュエータには、前記アクチュエータに関する情報を表示し前記カバーにより覆われる表示器が設けられ、前記表示器の表示を前記カバーの外部から視認可能に構成される。
【図面の簡単な説明】
【0008】
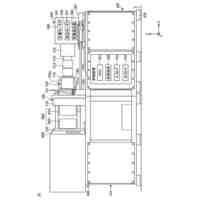
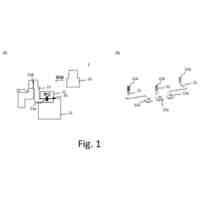
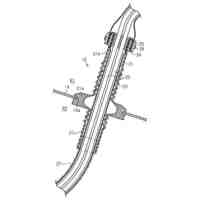
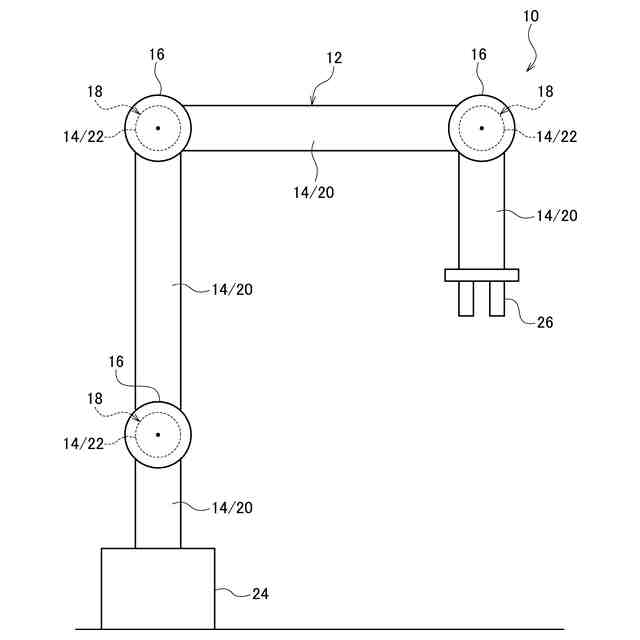
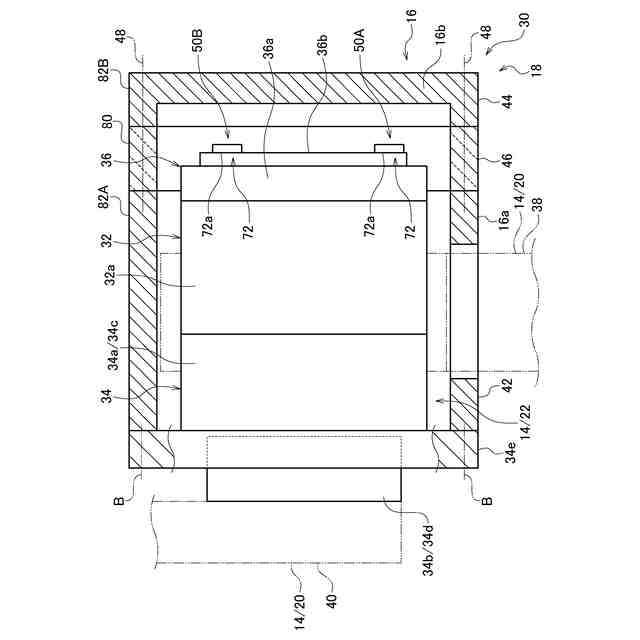
第1実施形態のロボットを模式的に示す側面図である。
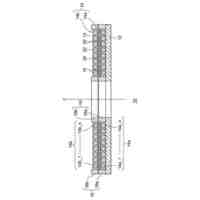
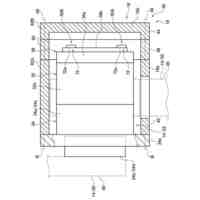
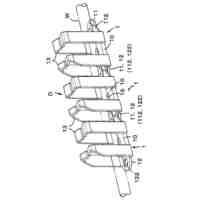
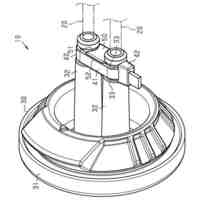
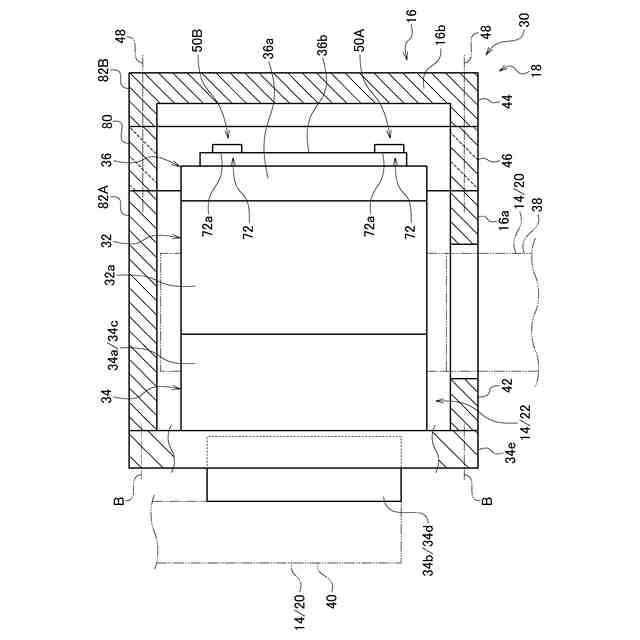
第1実施形態のアクチュエータユニットを模式的に示す部分断面図である。
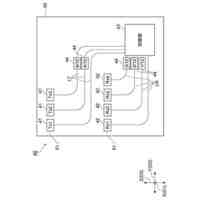
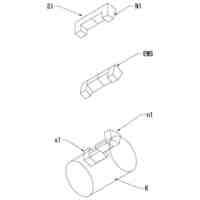
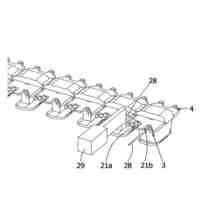
第1実施形態のカバーを模式的に示す分解斜視図である。
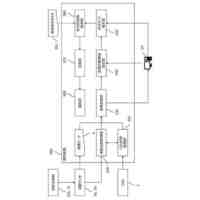
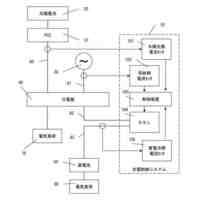
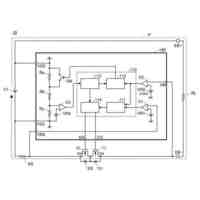
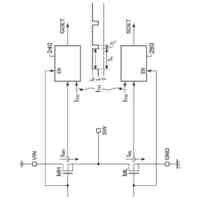
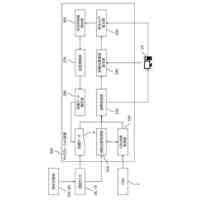
第1実施形態のアクチュエータに関する構成を示すブロック図である。
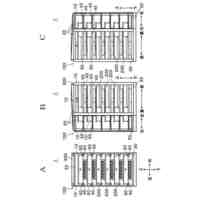
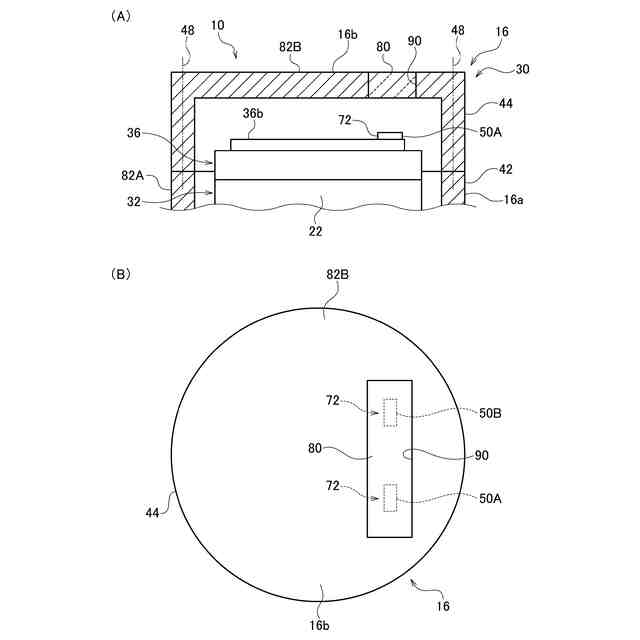
図5(A)は、第2実施形態のアクチュエータユニットを模式的に示す部分断面図であり、図5(B)は、図5(A)のアクチュエータユニットを反負荷側から見た模式図である。
図6(A)は、第3実施形態のアクチュエータユニットを模式的に示す部分断面図であり、図6(B)は、図6(A)のアクチュエータユニットを反負荷側から見た模式図である。
【発明を実施するための形態】
【0009】
以下、本開示のロボット及びアクチュエータユニットを実施するための実施形態を説明する。同一又は同等の要素には同一の符号を付し、重複する説明を省略する。各図面では、説明の便宜のため、適宜、構成要素を省略、拡大、縮小する。図面は符号の向きに合わせて見るものとする。
【0010】
(第1実施形態)図1を参照する。ロボット10は、産業用ロボット、サービスロボット等である。ロボット10は、人と協働して作業するための協働ロボットでもよい。ロボット10は、ロボット本体12と、ロボット本体12を構成する本体部材14を覆うカバー16と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
住友重機械工業株式会社
射出成形機
1日前
住友重機械工業株式会社
超伝導コイル
21日前
住友重機械工業株式会社
RTGクレーン、及びレーダー装置
今日
住友重機械工業株式会社
RTGクレーン、及びレーダー装置
今日
住友重機械工業株式会社
荷揚げ機械、荷揚げ方法、記憶媒体
8日前
住友重機械工業株式会社
ロボット及びアクチュエータユニット
1日前
住友重機械工業株式会社
インフレーション成形装置、および誘導装置
今日
住友重機械工業株式会社
メタン生成装置、メタン生成方法および発電システム
27日前
住友重機械工業株式会社
キャリブレーション装置、キャリブレーション方法、記憶媒体
8日前
個人
永久磁石モーター
7日前
個人
充電制御システム
1か月前
個人
移動体を用いる駐車場発電所
11日前
竹内工業株式会社
配線ダクト
18日前
日産自動車株式会社
電子機器
1日前
エイブリック株式会社
バッテリ装置
8日前
スズキ株式会社
移動システム
1か月前
井関農機株式会社
充電システム
1日前
トヨタ自動車株式会社
溶接装置
4日前
三菱ケミカル株式会社
電池
7日前
ダイハツ工業株式会社
グロメット
1か月前
富士電機株式会社
整流装置
26日前
株式会社ダイヘン
移動装置
11日前
住友電装株式会社
電気接続箱
21日前
愛知電機株式会社
巻線方法および巻線装置
6日前
株式会社アイシン
直流回転電機
4日前
富士電機株式会社
電力変換装置
15日前
ローム株式会社
半導体集積回路
20日前
株式会社デンソー
携帯機
1か月前
株式会社ダイヘン
電力変換装置
6日前
住友電装株式会社
ワイヤハーネス
今日
住友電装株式会社
ワイヤハーネス
28日前
株式会社アイシン
駆動装置
1か月前
株式会社豊田自動織機
電動圧縮機
20日前
住友電装株式会社
ワイヤハーネス
20日前
ローム株式会社
スナバ回路
14日前
株式会社ダイヘン
変換装置集積体
6日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ