TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129609
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026352
出願日
2024-02-26
発明の名称
車両制御装置及び車両制御方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/09 20120101AFI20250829BHJP(車両一般)
要約
【課題】自動ブレーキによる減速量が不足する頻度を低減可能な車両制御装置を提供する
【解決手段】車両制御装置は、自車両と物標との衝突を回避するために運転者が操舵を開始する必要がある時点での「自車両が物標に衝突するまでに要する時間」である操舵開始閾値時間を所定の軌跡計算用横加速度に基いて演算し、自車両が物標に衝突するまでに要する衝突予測時間が、操舵開始閾値時間と、前記衝突を回避するために自動ブレーキを開始する必要がある時点での「自車両が物標に衝突するまでに要する時間」である自動ブレーキ開始閾値時間と、のうちの短い方の閾値時間以下になったとき、自動ブレーキを開始する。車両制御装置は、軌跡計算用横加速度を、自車両の車速が所定の速度よりも高い場合には自車両の車速が前記所定の速度よりも低い場合に比べて小さい値に設定した上で前記操舵開始閾値時間を演算する。
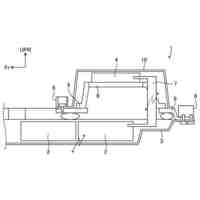
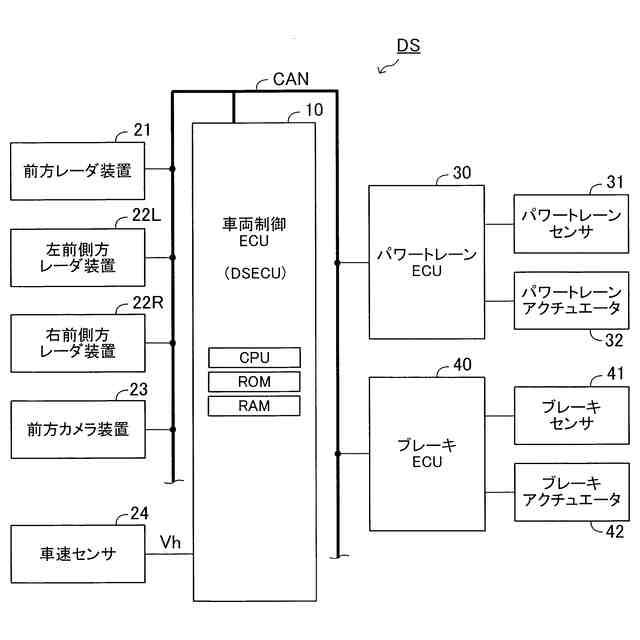
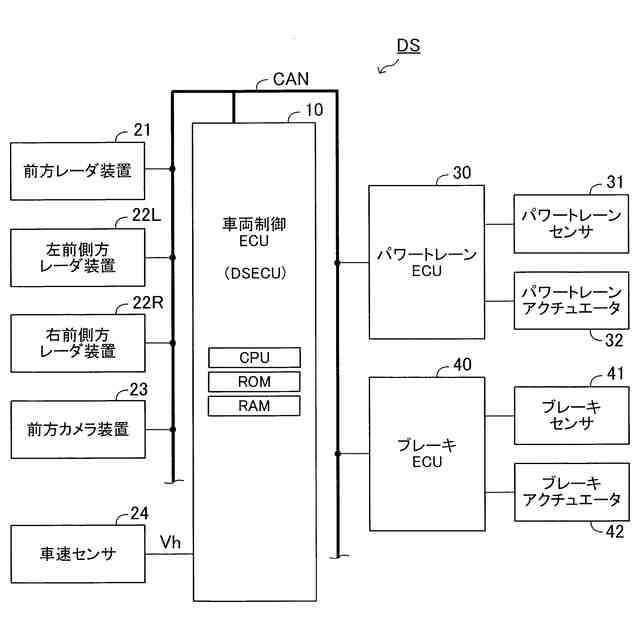
【選択図】図1
特許請求の範囲
【請求項1】
自車両の周囲に存在する物標に関する情報を取得し、
前記自車両が前記物標に衝突するまでに要する衝突予測時間を前記情報に基いて取得し、
前記自車両と前記物標との衝突を回避するために前記自車両の運転者が操舵を開始する必要がある時点での前記自車両が前記物標に衝突するまでに要する時間である操舵開始閾値時間を所定の軌跡計算用横加速度に基いて演算し、
前記取得した衝突予測時間が、前記操舵開始閾値時間と、前記衝突を回避するために自動ブレーキを開始する必要がある時点での前記自車両が前記物標に衝突するまでに要する時間である自動ブレーキ開始閾値時間と、のうちの短い方の閾値時間以下になったとき、前記自動ブレーキを開始する、
ように構成されたコントローラ、
を備えた車両制御装置において、
前記コントローラは、
前記軌跡計算用横加速度として、前記自車両の車速が所定の速度よりも高い場合には前記自車両の車速が前記所定の速度よりも低い場合に比べて小さい値、を用いて前記操舵開始閾値時間を演算するように構成された、
車両制御装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記コントローラは、
前記自車両が右に操舵されると仮定した場合における前記操舵開始閾値時間である右旋回用の操舵開始閾値時間と、前記自車両が左に操舵されると仮定した場合における前記操舵開始閾値時間である左旋回用の操舵開始閾値時間と、の両方を演算し、
前記取得した衝突予測時間が、前記右旋回用の操舵開始閾値時間、前記左旋回用の操舵開始閾値時間及び前記自動ブレーキ開始閾値時間の中の最も短い閾値時間以下になったとき、前記自動ブレーキを開始する、
ように構成された、
車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記コントローラは、
前記自車両が前記衝突を回避するために右に操舵された場合に前記自車両が進入可能な右スペースが存在し且つ前記自車両が前記衝突を回避するために左に操舵された場合に前記自車両が進入可能な左スペースが存在しない場合、
前記自車両が右に操舵されると仮定した場合における前記操舵開始閾値時間である右旋回用の操舵開始閾値時間を演算し、
前記取得した衝突予測時間が、前記右旋回用の操舵開始閾値時間及び前記自動ブレーキ開始閾値時間のうちの短い方の閾値時間以下になったとき、前記自動ブレーキを開始する、
ように構成された、
車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
前記コントローラは、
前記自車両が前記衝突を回避するために左に操舵された場合に前記自車両が進入可能な左スペースが存在し且つ前記自車両が前記衝突を回避するために右に操舵された場合に前記自車両が進入可能な右スペースが存在しない場合、
前記自車両が左に操舵されると仮定した場合における前記操舵開始閾値時間である左旋回用の操舵開始閾値時間を演算し、
前記取得した衝突予測時間が、前記左旋回用の操舵開始閾値時間及び前記自動ブレーキ開始閾値時間のうちの短い方の閾値時間以下になったとき、前記自動ブレーキを開始する、
ように構成された、
車両制御装置。
【請求項5】
自車両の周囲に存在する物標に関する情報を取得するステップと、
前記自車両が前記物標に衝突するまでに要する衝突予測時間を前記情報に基いて取得するステップと、
所定の軌跡計算用横加速度に基いて、前記自車両と前記物標との衝突を回避するために前記自車両の運転者が操舵を開始する必要がある時点での前記自車両が前記物標に衝突するまでに要する時間である操舵開始閾値時間を演算するステップと、
前記取得した衝突予測時間が、前記操舵開始閾値時間と、前記衝突を回避するために自動ブレーキを開始する必要がある時点での前記自車両が前記物標に衝突するまでに要する時間である自動ブレーキ開始閾値時間と、のうちの短い方の閾値時間以下になったとき、前記自動ブレーキを開始するステップと、
を含む車両制御方法において、
前記操舵開始閾値時間を演算するステップは、
前記軌跡計算用横加速度を、前記自車両の車速が所定の速度よりも高い場合には前記自車両の車速が前記所定の速度よりも低い場合に比べて小さい値に設定した上で前記操舵開始閾値時間を演算するステップである、
車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動ブレーキを用いた衝突被害軽減制御を実行する車両制御装置及び車両制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
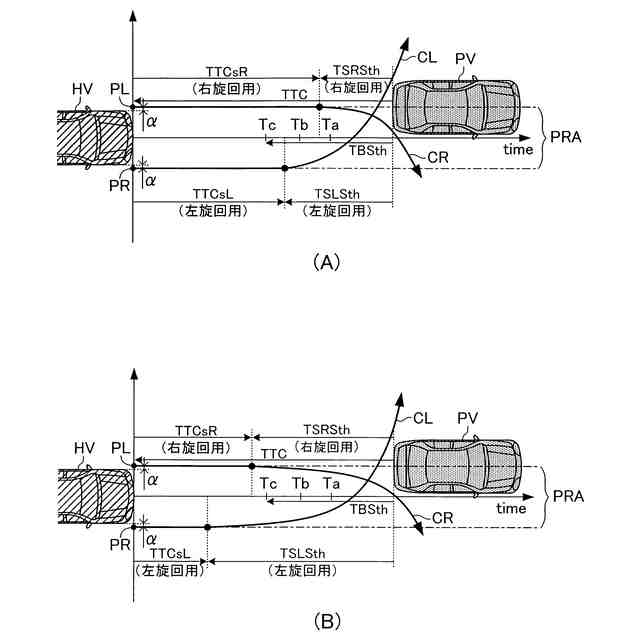
衝突被害軽減制御を実行する従来の装置の一つ(以下、「従来装置」と称する。)は、自車両と物標とが衝突する可能性があると判定した場合、物標の自車両に対する横位置(例えば、ラップ率)に応じて「運転者の操舵により衝突を回避できる操舵限界衝突時間TTCc」を求める。従来装置は、操舵限界衝突時間TTCcが制動限界衝突時間TTCyよりも大きい場合、衝突予測時間TTCが制動限界衝突時間TTCy以下になったときに強い自動ブレーキを作動させる。これに対し、従来装置は、操舵限界衝突時間TTCcが制動限界衝突時間TTCyよりも小さい場合、衝突予測時間TTCが操舵限界衝突時間TTCc以下になったときに強い自動ブレーキを作動させる(特許文献1を参照。)。
【先行技術文献】
【特許文献】
【0003】
特開2017-114427号公報
【発明の概要】
【0004】
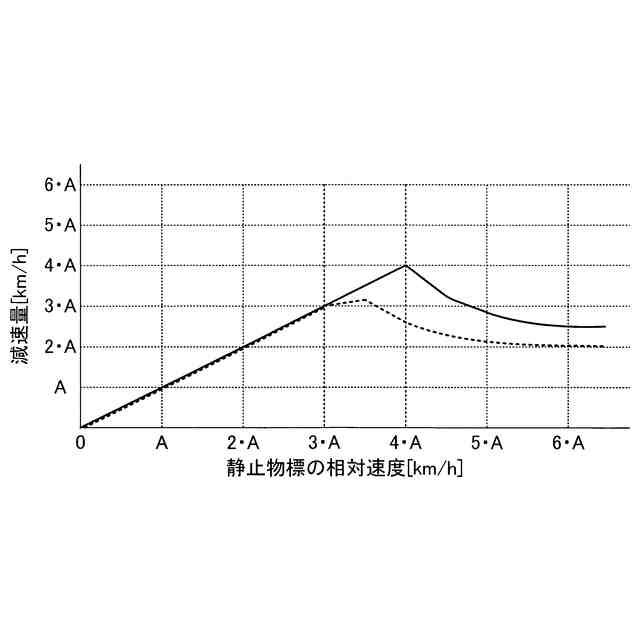
操舵限界衝突時間TTCcにて自動ブレーキを作動させる場合、運転者が操舵によって衝突を回避しようとしていたときには、自動ブレーキの不要作動を回避することができる。しかしながら、実際には操舵が行われなかった場合或いは実際の操舵量が衝突回避のために必要であると想定された操舵量に対して不足している場合、自車両が物標に衝突し且つ自車両が物標に衝突するまでに自車両を十分に減速させることができない。即ち、この場合、自動ブレーキによる減速量が不足する。
【0005】
本発明は、係る問題に対処するためになされた。即ち、本発明の目的の一つは、自動ブレーキの不要作動を出来るだけ回避するとともに、自動ブレーキによる減速量が不足する頻度を低減可能な車両制御装置及び車両制御方法を提供することにある。
【0006】
本発明の一態様は、
自車両の周囲に存在する物標に関する情報を取得し、
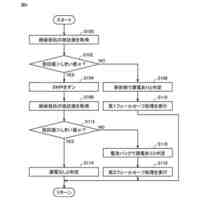
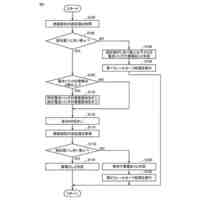
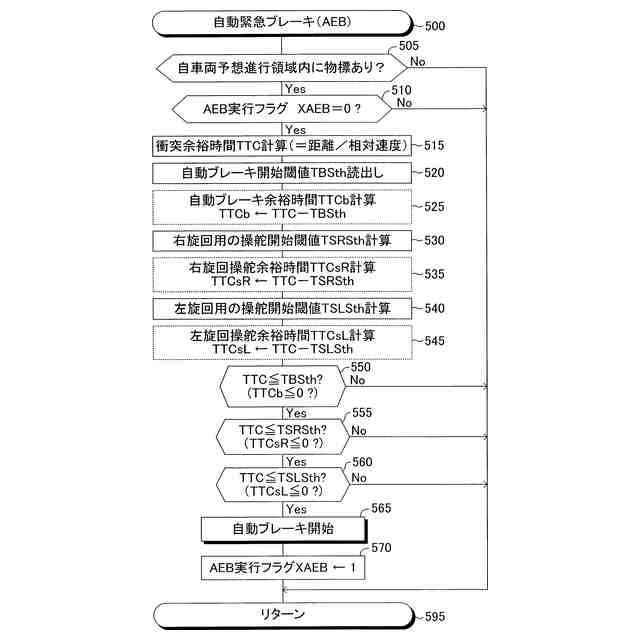
前記自車両が前記物標に衝突するまでに要する衝突予測時間(TTC)を前記情報に基いて取得し(S515)、
前記自車両と前記物標との衝突を回避するために前記自車両の運転者が操舵を開始する必要がある時点での前記自車両が前記物標に衝突するまでに要する時間である操舵開始閾値時間(TSRSth、TSLSth)を所定の軌跡計算用横加速度に基いて演算し(S530、S540)、
前記取得した衝突予測時間(TTC)が、前記操舵開始閾値時間(TSRSth、TSLSth)と、前記衝突を回避するために自動ブレーキを開始する必要がある時点での前記自車両が前記物標に衝突するまでに要する時間である自動ブレーキ開始閾値時間(TBSth)と、のうちの短い方の閾値時間以下になったとき(S550乃至S560を参照。)、前記自動ブレーキを開始する(S565)、
ように構成されたコントローラ(10)を備える。
【0007】
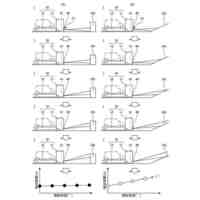
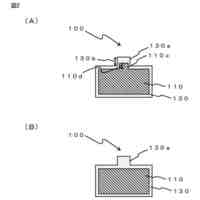
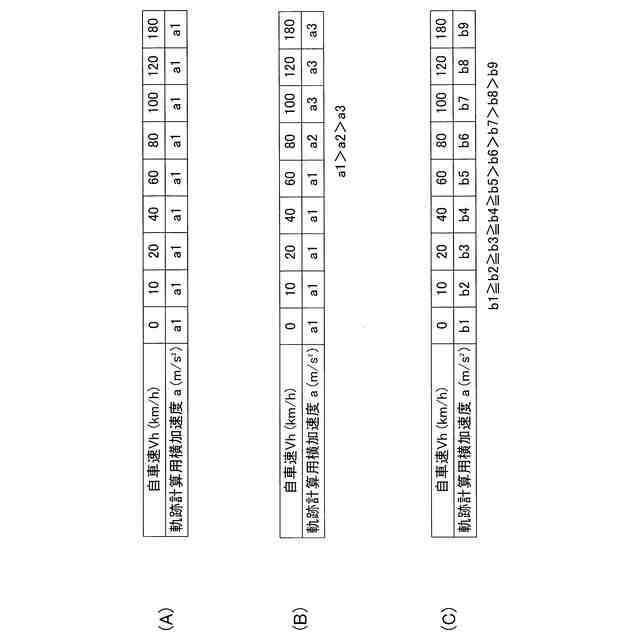
本発明者は、種々のデータを検討した結果、自車速が高い場合には自車速が低い場合に比べて運転者による衝突を回避するための操舵の量及び/又は操舵速度が小さくなる傾向にあるとの知見を得た。
【0008】
そこで、上記態様のコントローラは、
前記軌跡計算用横加速度として、前記自車両の車速が所定の速度よりも高い場合には前記自車両の車速が前記所定の速度よりも低い場合に比べて小さい値、を用いて前記操舵開始閾値時間を演算するように構成されている(図2の(A)及び(B)を参照。)。
【0009】
これによれば、自車両の車速(自車速)が所定の速度よりも高い場合には軌跡計算用横加速度が小さくなるので、演算される操舵開始閾値時間が長くなる。よって、自動ブレーキ開始閾値時間が操舵開始閾値時間よりも短い自車速の範囲が高速側に拡大する。その結果、従来に比べてより高い自車速の範囲において自動ブレーキが自動ブレーキ開始閾値時間にて開始される。従って、上記態様の車両制御装置は、自動ブレーキの不要作動を出来るだけ回避しながら、自動ブレーキによる減速量が不足する車速範囲を小さくすることができ、自動ブレーキによる減速量が不足する頻度を低減することができる。
【0010】
上記説明においては、本発明の理解を助けるために、後述する実施形態に対応する発明の構成に対し、その実施形態で用いた名称及び/又は符号を括弧書きで添えている。しかしながら、本発明の各構成要素は、前記名称及び/又は前記符号によって規定される実施形態に限定されるものではない。本発明は、車両制御方法及びそのプログラムにも及ぶ。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
方法
9日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
電池
26日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
負極層
16日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
光電極
1か月前
トヨタ自動車株式会社
減圧弁
1か月前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
モータ
25日前
トヨタ自動車株式会社
ロータ
20日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
モータ
26日前
トヨタ自動車株式会社
電動車
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ