TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129424
公報種別
公開特許公報(A)
公開日
2025-09-04
出願番号
2025115443,2023540395
出願日
2025-07-08,2022-08-03
発明の名称
ロボット制御装置、ロボット制御システム、及びロボット制御方法
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250828BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットのキャリブレーション精度を向上できるロボット制御装置、ロボット制御システム、及びロボット制御方法を提供する。
【解決手段】ロボット制御装置は、センサおよびエンドエフェクタを有するロボットを制御する制御部を備える。制御部は、ロボットの動作空間内に配された測定対象物に対するエンドエフェクタの位置情報を取得し、位置情報に基づき、ロボットの動作に関する座標系を補正する。
【選択図】図1
特許請求の範囲
【請求項1】
センサおよびエンドエフェクタを有するロボットを制御する制御部を備え、
前記制御部は、
前記ロボットの動作空間に配された測定対象物に対する前記エンドエフェクタの位置情報を取得し、
前記位置情報に基づき、ロボットの動作に関する座標系の補正する、
ロボット制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、
前記動作空間に関する空間情報に基づいて、前記測定対象物の座標を取得し、
前記測定対象物の座標に基づいて、前記エンドエフェクタを前記測定対象物へ移動させるように前記ロボットを制御し、
前記エンドエフェクタの前記測定対象物に対する位置情報に基づいて、前記ロボットの動作に関する座標系を補正する、
請求項1に記載のロボット制御装置。
【請求項3】
前記測定対象物は測定対象物マークを備え、
前記制御部は、前記測定対象物マークに関する空間情報に基づいて、前記測定対象物の座標を算出する、請求項2に記載のロボット制御装置。
【請求項4】
前記制御部は、複数の前記測定対象物に対する前記エンドエフェクタの位置情報に基づいて、ロボットの動作に関する座標系を補正する、請求項1から3までのいずれか一項に記載のロボット制御装置。
【請求項5】
前記制御部は、前記位置情報として、前記エンドエフェクタを前記測定対象物に接触に基づく接触情報を取得する、請求項1から4までのいずれか一項に記載のロボット制御装置。
【請求項6】
前記制御部は、前記エンドエフェクタを前記測定対象物に接触させた状態で前記エンドエフェクタを移動させることで、前記エンドエフェクタと前記測定対象物との接触が無くなることを検出した情報に基づいて、前記ロボットの動作空間に関する空間情報に基づく座標系を補正する、請求項1から5までのいずれか一項に記載のロボット制御装置。
【請求項7】
前記制御部は、前記エンドエフェクタを前記測定対象物に上面から接触させた状態で前記エンドエフェクタを前記上面の面方向に移動させる、請求項6に記載のロボット制御装置。
【請求項8】
前記エンドエフェクタは保持部を備え、
前記制御部は、前記保持部を移動させるように前記ロボットを制御することで、前記エンドエフェクタを前記測定対象物に接触させる、請求項1から4までのいずれか一項に記載のロボット制御装置。
【請求項9】
前記制御部は、前記保持部が少なくとも2本の指を含む場合、少なくとも1本の前記指を、他の前記指と近接させるように移動させ、前記測定対象物に接触させた状態で前記測定対象物の周りで回転するように前記ロボットを制御する、請求項8に記載のロボット制御装置。
【請求項10】
前記制御部は、前記エンドエフェクタが前記測定対象物の少なくとも1つの面に接触するように前記ロボットを制御する、請求項1から9までのいずれか一項に記載のロボット制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【関連出願へのクロスリファレンス】
【0001】
本出願は、日本国特許出願2021-127725号(2021年8月3日出願)の優先権を主張するものであり、当該出願の開示全体を、ここに参照のために取り込む。
続きを表示(約 2,200 文字)
【技術分野】
【0002】
本開示は、ロボット制御装置、ロボット制御システム、及びロボット制御方法に関する。
【背景技術】
【0003】
従来、被作業対象の位置合わせマークの画像認識処理に基づいて教示データを作成するロボット制御装置が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開平5-301183号公報
【発明の概要】
【0005】
本開示の一実施形態に係るロボット制御装置は、センサおよびエンドエフェクタを有するロボットを制御する制御部を備える。前記制御部は、前記ロボットの動作空間内に配された測定対象物に対する前記エンドエフェクタの位置情報を取得し、前記位置情報に基づき、前記ロボットの動作に関する座標系を補正する。
【0006】
本開示の一実施形態に係るロボット制御システムは、前記ロボット制御装置と、前記ロボットとを備える。
【0007】
本開示の一実施形態に係るロボット制御方法は、センサおよびエンドエフェクタを有するロボットを制御する。前記ロボット制御方法は、前記ロボットの動作空間内に配された測定対象物に対する前記エンドエフェクタの位置情報を取得することと、前記位置情報に基づき、前記ロボットの動作に関する座標系を補正することとを含む。
【図面の簡単な説明】
【0008】
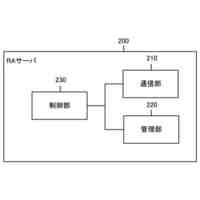
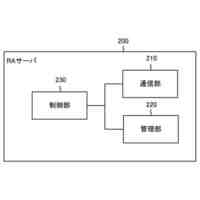
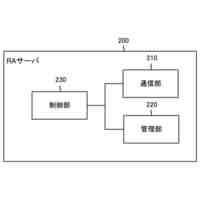
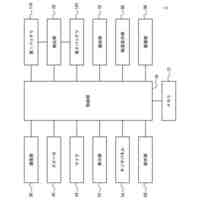
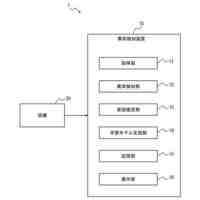
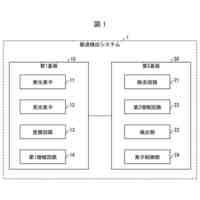
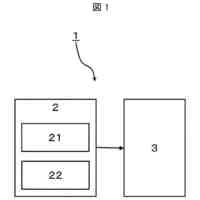
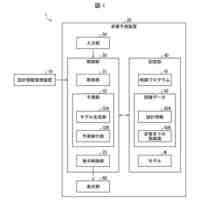
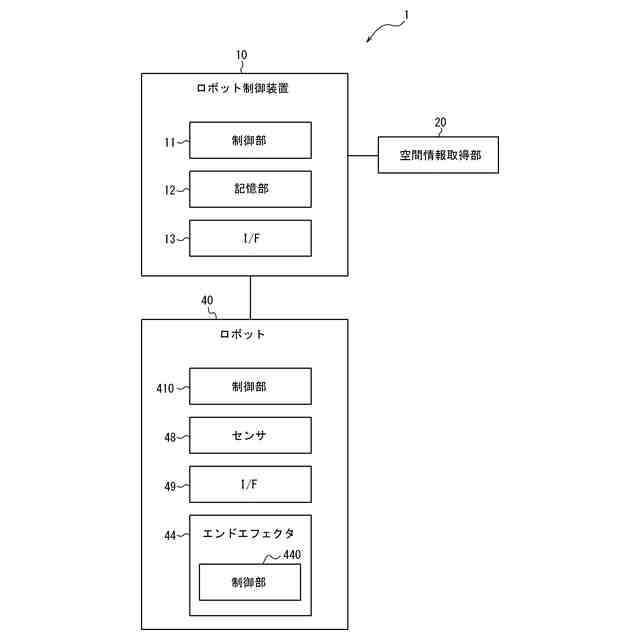
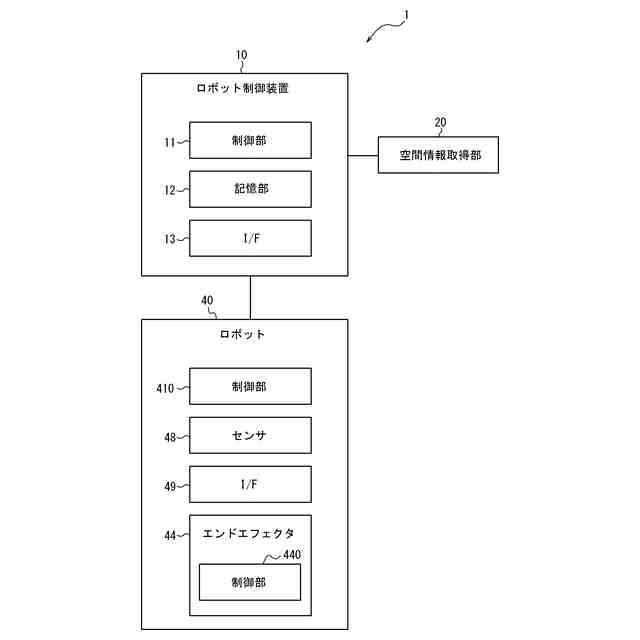
一実施形態に係るロボット制御システムの構成例を示すブロック図である。
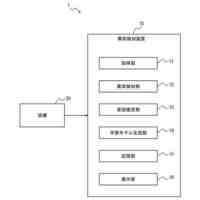
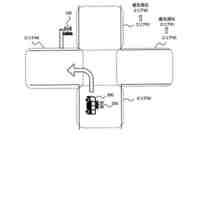
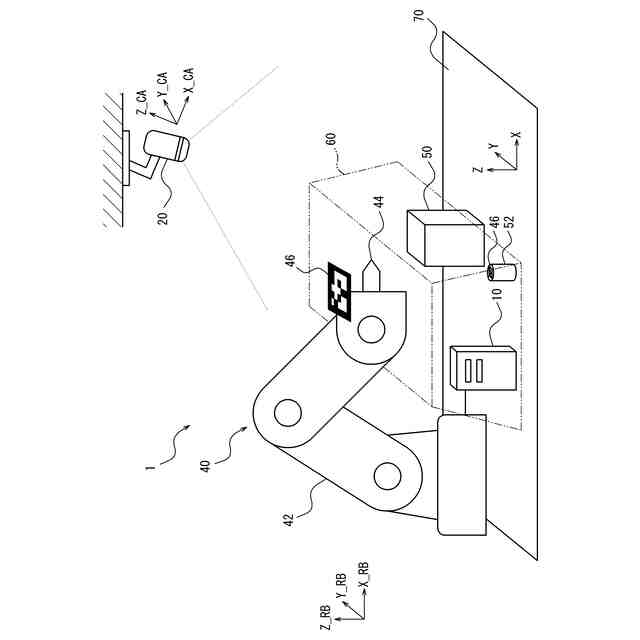
一実施形態に係るロボット制御システムの構成例を示す模式図である。
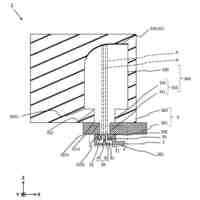
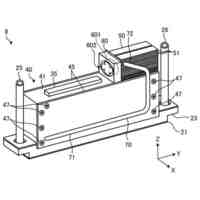
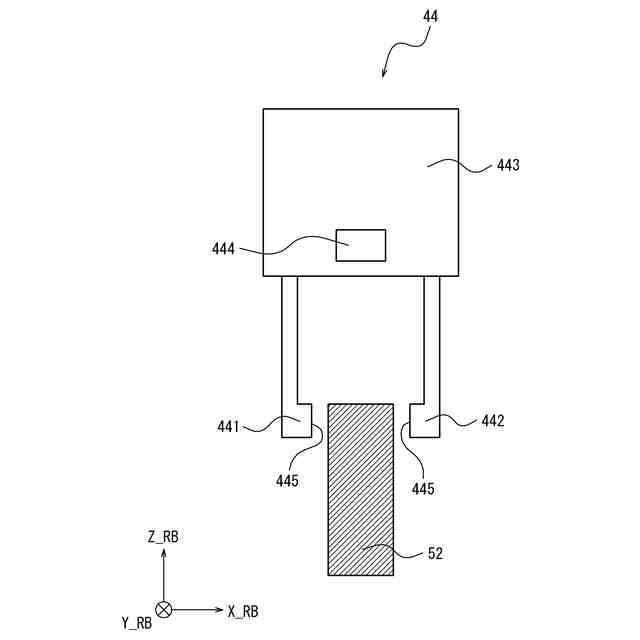
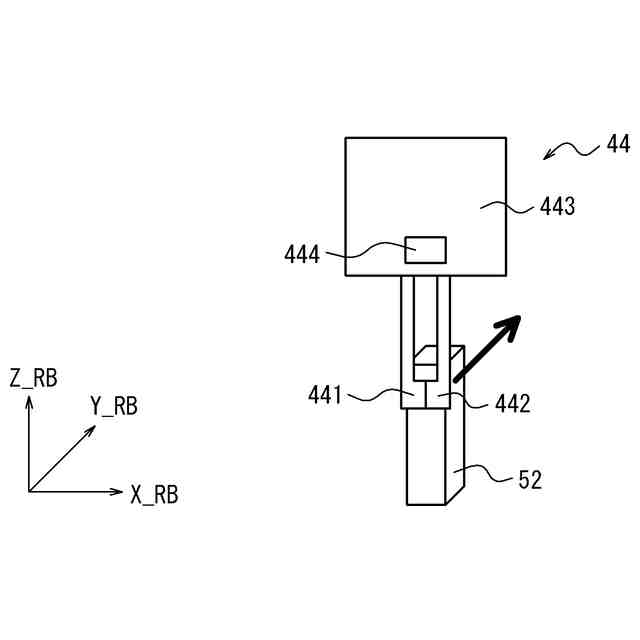
エンドエフェクタの構成例を示す模式図である。
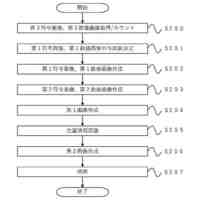
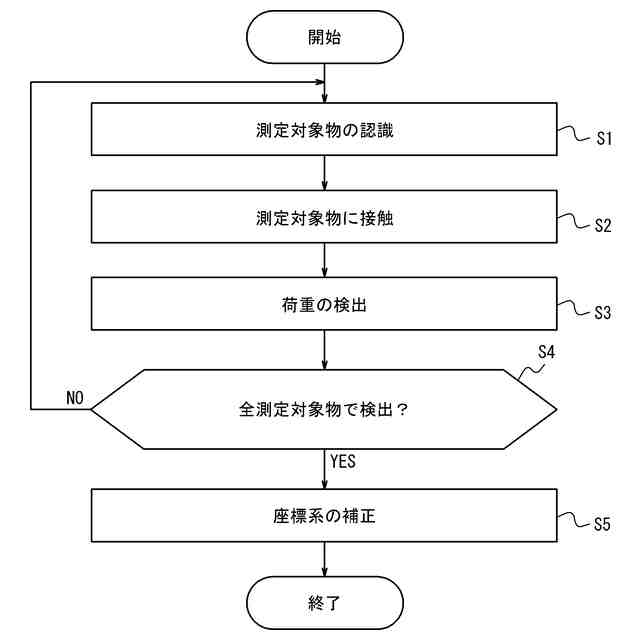
一実施形態に係るロボット制御方法の手順例を示すフローチャートである。
第1指と第2指とが開いた状態において第1指の外側で測定対象物に接触する動作例を示す模式図である。
第1指と第2指とが開いた状態において第1指の側面で測定対象物に接触する動作例を示す模式図である。
第1指と第2指とが開いた状態において第1指の先端で測定対象物に接触する動作例を示す模式図である。
第1指と第2指とが閉じた状態において第1指の外側で測定対象物に接触する動作例を示す模式図である。
第1指と第2指とが閉じた状態において第1指又は第2指の側面で測定対象物に接触する動作例を示す模式図である。
第1指と第2指とが閉じた状態において第1指又は第2指の先端で測定対象物に接触する動作例を示す模式図である。
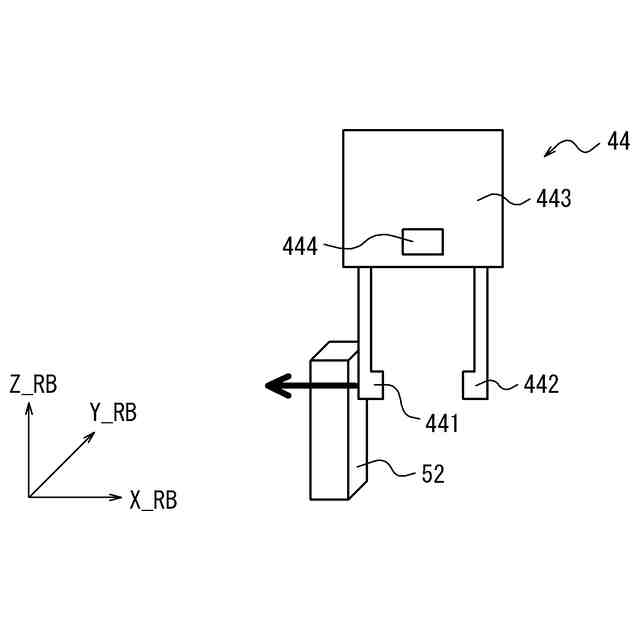
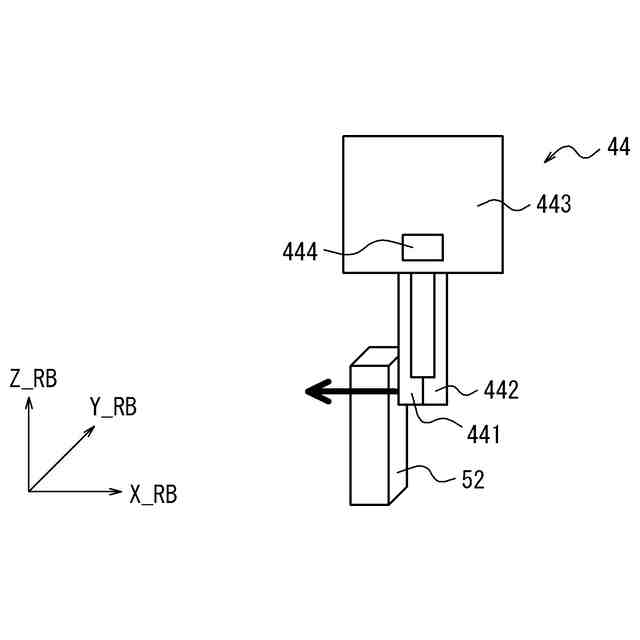
第1指又は第2指が測定対象物の上面に接触した状態で上面に沿ったX_RB軸方向に移動する動作例を示す模式図である。
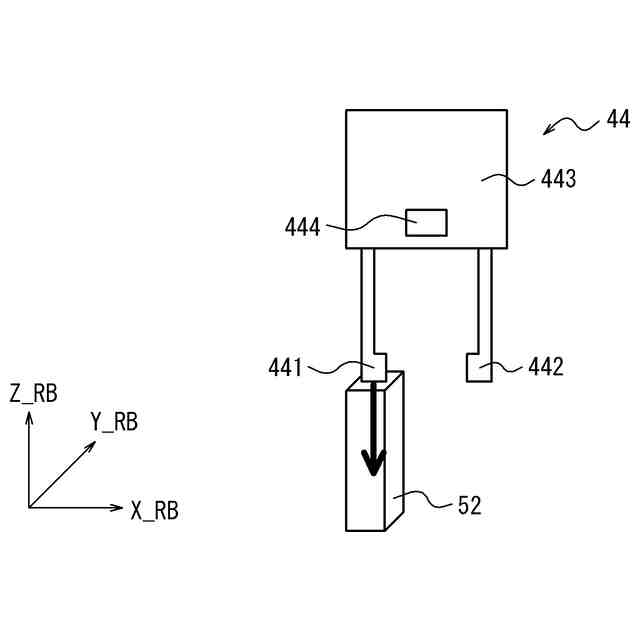
第1指又は第2指が測定対象物の上面に接触した状態で上面に沿ったY_RB軸方向に移動する動作例を示す模式図である。
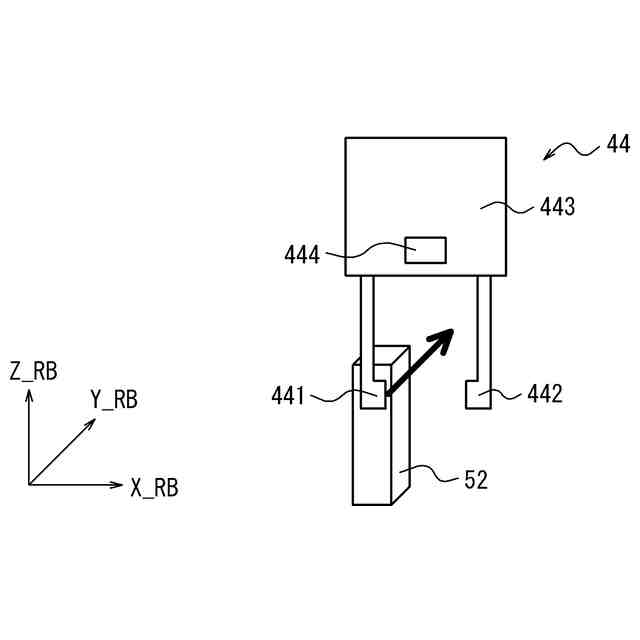
第1指又は第2指が測定対象物の上面に接触した状態で上面に沿ったX_RB軸方向及びY_RB軸方向に同時に移動する動作例を示す模式図である。
第1指と第2指とで測定対象物を挟んで測定対象物の周りを回転する動作例を示す模式図である。
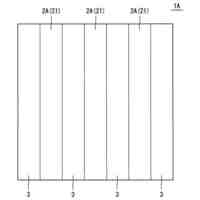
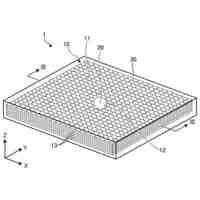
マークを有する測定対象物の構成例を示す模式図である。
マークを有するとともに接触領域を有する測定対象物の構成例を示す模式図である。
マークを有しない測定対象物の構成例を示す模式図である。
円柱状の測定対象物の構成例を示す模式図である。
作業台の上面の対角の位置に測定対象物を配置する例を示す模式図である。
【発明を実施するための形態】
【0009】
画像認識によるキャリブレーションよりも高精度でロボットのキャリブレーションを実行することが求められる。本開示の一実施形態に係るロボット制御装置、ロボット制御システム、及びロボット制御方法によれば、ロボットのキャリブレーション精度が向上され得る。
【0010】
(ロボット制御システム1の概要)
図1及び図2に例示されるように、一実施形態に係るロボット制御システム1は、ロボット40と、ロボット制御装置10と、空間情報取得部20とを備える。ロボット40は、所定の動作空間において動作する。空間情報取得部20は、ロボット40が動作する動作空間を撮影し、動作空間のデプス情報を生成する。空間情報取得部20は、後述するように、動作空間に存在する物体50の表面に位置する測定点までの距離を算出する。空間情報取得部20から測定点までの距離は、デプスとも称される。デプス情報は、各測定点について測定したデプスに関する情報である。言い換えれば、デプス情報は、動作空間に存在する物体50の表面に位置する測定点までの距離に関する情報である。デプス情報は、空間情報取得部20から見た方向とその方向のデプスとを関連づけたデプスマップとして表されてもよい。空間情報取得部20は、(X_CA,Y_CA,Z_CA)座標系に基づいて動作空間のデプス情報を生成する。空間情報取得部20は、動作空間を撮影した画像を生成してもよい。動作空間を撮影した画像は、動作空間画像とも称される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
京セラ株式会社
刃物
15日前
京セラ株式会社
二次電池
1日前
京セラ株式会社
伝熱部材および電子装置
1か月前
京セラ株式会社
半導体装置及びその製造方法
1日前
京セラ株式会社
骨モデルおよび表示システム
9日前
京セラ株式会社
波長変換素子および発光装置
1か月前
京セラ株式会社
電源制御装置及び電源制御方法
1日前
京セラ株式会社
液体吐出ヘッドおよび記録装置
今日
京セラ株式会社
電源制御装置及び電源制御方法
1日前
京セラ株式会社
電源制御装置及び電源制御方法
1日前
京セラ株式会社
弾性波装置、分波器及び通信装置
1か月前
京セラ株式会社
電子機器及び電子機器の制御方法
1か月前
京セラ株式会社
液滴吐出ヘッドおよび液滴吐出装置
6日前
京セラ株式会社
電子機器、制御方法、及びプログラム
1か月前
京セラ株式会社
電磁波抑制樹脂組成物及びその硬化物
1か月前
京セラ株式会社
電子機器、制御方法、及びプログラム
1か月前
京セラ株式会社
配線基板およびそれを用いた実装構造体
1か月前
京セラ株式会社
回路基板、半導体装置および実装構造体
1か月前
京セラ株式会社
電子部品搭載用基板及び電子モジュール
16日前
京セラ株式会社
異常検知装置、プログラム及び異常検知方法
24日前
京セラ株式会社
異常検知装置、プログラム及び異常検知方法
24日前
京セラ株式会社
異常検知装置、プログラム及び異常検知方法
24日前
京セラ株式会社
情報処理装置及び学習モデル用データ生成方法
1日前
京セラ株式会社
情報処理方法、情報処理装置、及び情報処理システム
17日前
京セラ株式会社
切削インサート、切削工具及び切削加工物の製造方法
今日
京セラ株式会社
表示システム、表示制御装置及び表示制御プログラム
1日前
京セラ株式会社
表示システム、表示制御装置及び表示制御プログラム
1日前
国立研究開発法人産業技術総合研究所
光電子集積回路
9日前
京セラ株式会社
脈波検出装置、脈波検出システム、および脈波検出方法
1か月前
京セラ株式会社
膜付部材
16日前
株式会社サーモグラフィティクス
伝熱部材および電子装置
29日前
京セラ株式会社
疾患予測システム
今日
京セラ株式会社
無線路側機、通信方法、通信システム、プログラム、及び車載通信機
1か月前
京セラ株式会社
検出機及び検出装置
1か月前
京セラ株式会社
歩留予測装置、モデル生成装置、歩留予測システムおよび歩留予測方法
1か月前
京セラ株式会社
学習データ生成方法、学習済みモデル、情報処理装置、及び情報処理方法
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ