TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128316
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2025098321,2024063422
出願日
2025-06-12,2021-07-06
発明の名称
車両用操舵ガイドトルク制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B62D
6/00 20060101AFI20250826BHJP(鉄道以外の路面車両)
要約
【課題】操舵ガイドトルクに起因する操舵抵抗を感じる虞が低減されるよう改良された操舵ガイドトルク制御装置を提供する。
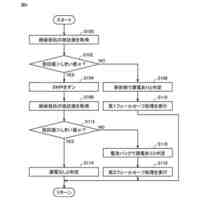
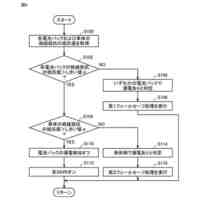
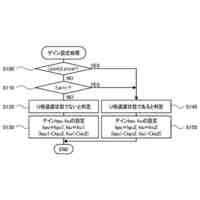
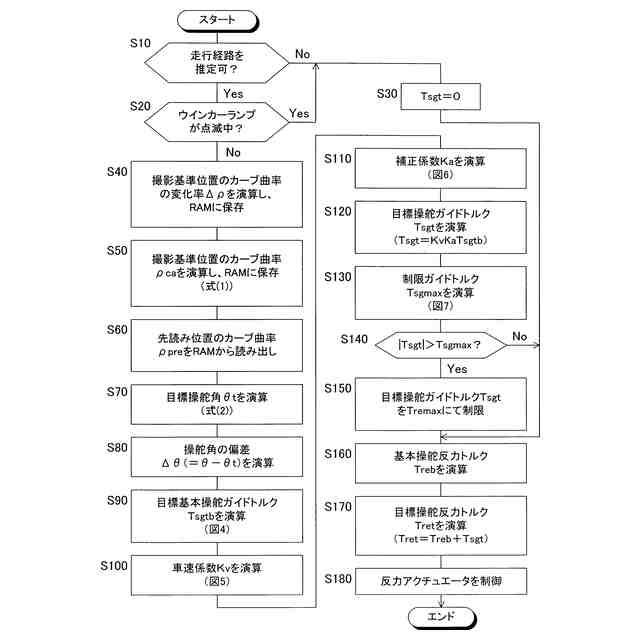
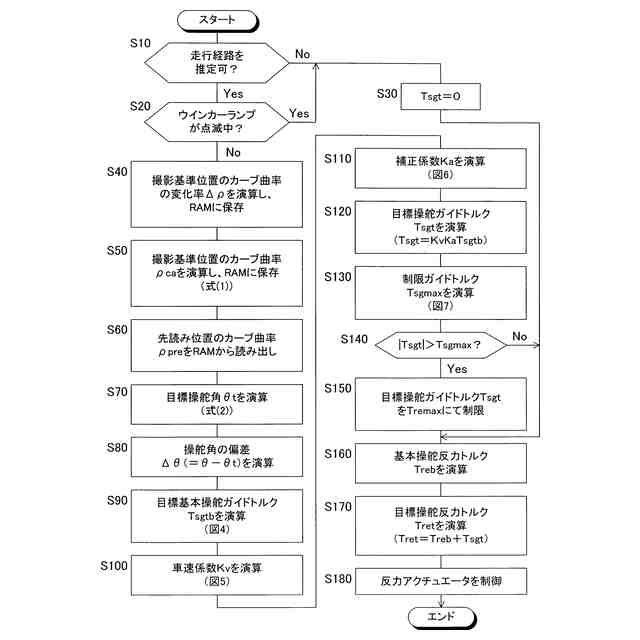
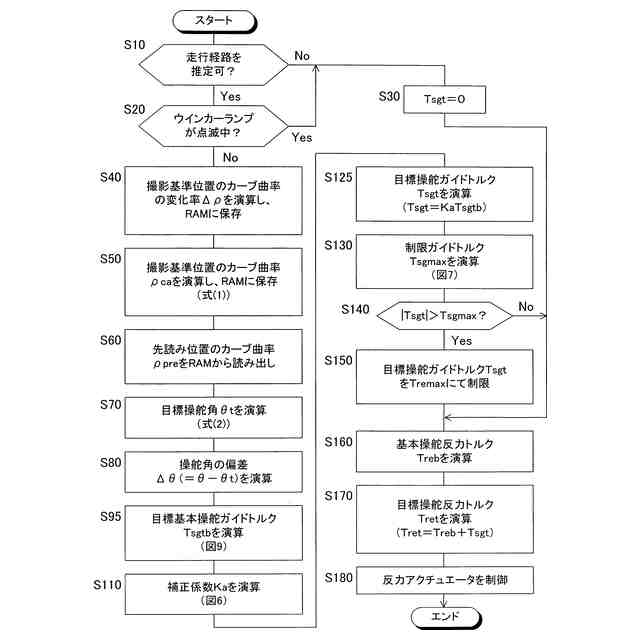
【解決手段】ステアリングホイールに操舵ガイドトルクを付与する反力アクチュエータを制御する制御ユニットは、カメラセンサにより検出された車両の前方の車線の情報に基づいて車両を車線に沿って走行させるための目標操舵ガイドトルクTsgtを演算し(S50~S120)、車両から所定の距離の範囲内において選択可能な車線の数Nrの情報を取得し、選択可能な車線の数に基づいて目標操舵ガイドトルクを修正する必要があると判定したときには、目標操舵ガイドトルクを修正する(S120~S140)。
【選択図】図3
特許請求の範囲
【請求項1】
ドライバーにより操舵操作される操舵入力部材と、前記操舵入力部材に与えられる操舵操作量に応じて転舵輪を転舵する転舵装置と、前記操舵入力部材に操舵ガイドトルクを付与するトルク付与装置と、前記トルク付与装置を制御する制御ユニットと、車両の前方の画像を取得する撮影装置と、を含む車両用操舵ガイドトルク制御装置において、
前記制御ユニットは、前記撮影装置により取得された画像に基づいて認識した車線に沿って前記車両を走行させるようにドライバーの操舵をガイドする目標操舵ガイドトルクを演算し、前記操舵ガイドトルクが前記目標操舵ガイドトルクになるように前記トルク付与装置を制御するよう構成され、
更に、前記制御ユニットは、前記車両から所定の距離の範囲内において選択可能な車線の数の情報を取得し、前記選択可能な車線の数に基づいて前記目標操舵ガイドトルクを修正する必要があると判定したときには、前記目標操舵ガイドトルクを修正するよう構成された、車両用操舵ガイドトルク制御装置。
続きを表示(約 340 文字)
【請求項2】
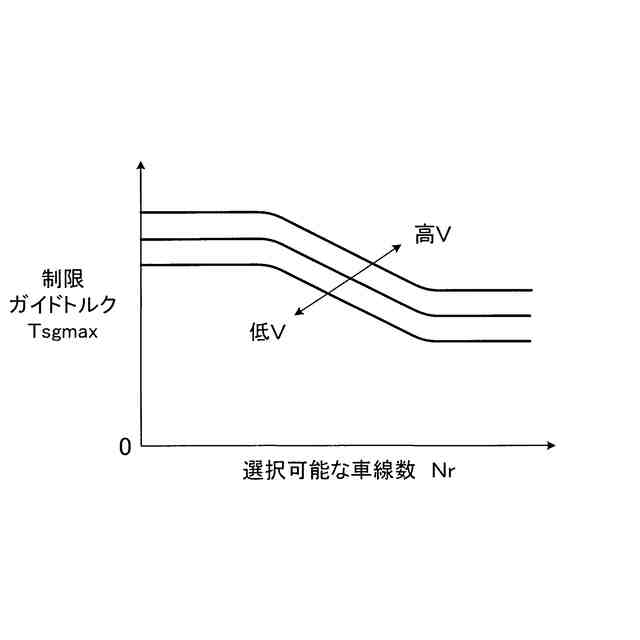
請求項1に記載の車両用操舵ガイドトルク制御装置において、前記制御ユニットは、前記選択可能な車線の数が多いほど小さくなるよう制限ガイドトルクを設定し、前記目標操舵ガイドトルクの大きさが前記制限ガイドトルクを越えているときには、前記目標操舵ガイドトルクを修正する必要があると判定し、前記目標操舵ガイドトルクの大きさを前記制限ガイドトルクに制限することにより、前記目標操舵ガイドトルクを修正するよう構成された車両用操舵ガイドトルク制御装置。
【請求項3】
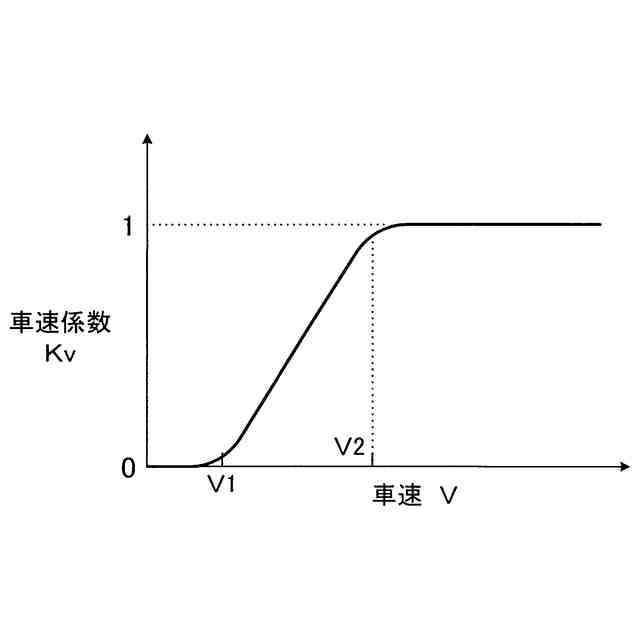
請求項2に記載の車両用操舵ガイドトルク制御装置において、前記制御ユニットは、車速の情報を取得し、車速が低いほど前記制限ガイドトルクを小さくするよう構成された車両用操舵ガイドトルク制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動車などの車両のための操舵ガイドトルク制御装置に係る。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
自動車などの車両のための操舵反力トルク制御装置として、例えば下記の特許文献1に記載されているように、外部センサの検出結果に基づいてドライバーの適正操舵操作量を予測し、適正操舵操作量の予測時刻に対応するドライバーの操舵操作量が適正操舵操作量範囲内にないときには、操舵操作量が適正操舵操作量範囲内へ至るまでの操舵反力トルクを従来よりも大きくするよう構成された操舵反力トルク制御装置が知られている。
【0003】
操舵反力トルクは、操舵操作量が適正操舵操作量範囲内から該範囲外へ変化するときには、操舵操作に抗する操舵反力トルクとして作用し、操舵操作量が適正操舵操作量範囲外から該範囲内へ至るときには、操舵操作を促す操舵トルクとして作用する。よって、下記の特許文献1に記載されている操舵反力トルク制御装置は、操舵ガイドトルク制御装置と呼ばれてもよい。
【0004】
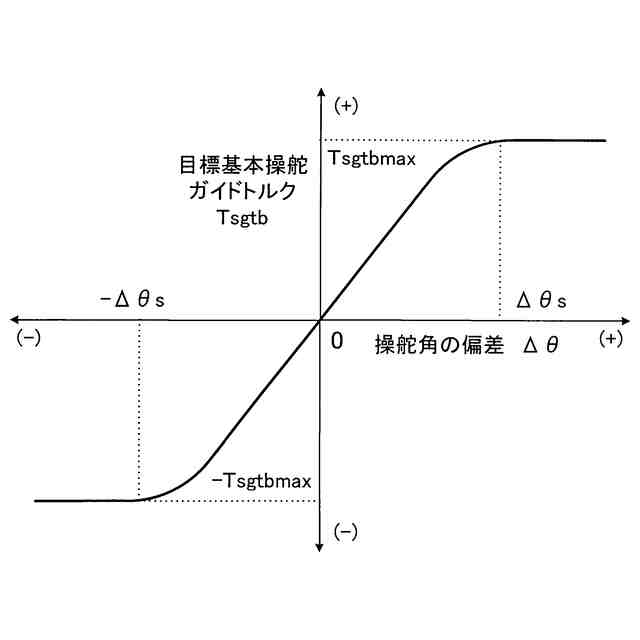
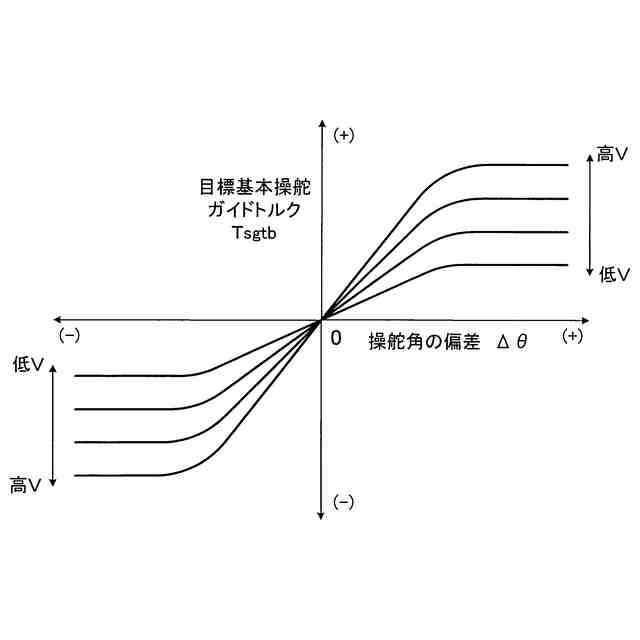
操舵ガイドトルク制御装置として、カメラセンサにより検出された車両の前方の走行路のカーブの曲率に基づいて、車両をカーブに沿って走行させるための目標操舵角を演算し、先読み時間を加味した目標操舵角と実際の操舵角との偏差に基づいて、実際の操舵操作量が目標操舵操作量を含む所定の操舵操作量の範囲内になるようにドライバーの操舵をガイドする目標操舵ガイドトルクを演算し、操舵ガイドトルクが目標操舵ガイドトルクになるようにトルク付与装置を制御する操舵ガイドトルク制御装置が知られている。
【0005】
上述のような操舵反力トルク制御装置及び操舵ガイドトルク制御装置によれば、車両が走行路のカーブを走行する際に、実際の操舵角が適切な操舵操作量の範囲内になるようにドライバーが操舵操作することを促すことができる。よって、ドライバーの操舵の主体感を維持しつつ、ドライバーの操舵操作量が適切な操舵操作量になるように操舵支援を行うことができる。
【先行技術文献】
【特許文献】
【0006】
特開2019-209844号公報
【発明の概要】
【0007】
〔発明が解決しようとする課題〕
操舵ガイドトルク制御装置が作動している状況においても、例えば側道への進路変更のように車両が現在走行している車線から逸れるようドライバーが操舵操作することがある。操舵ガイドトルク制御装置は車両が現在走行している車線に沿って走行するに適した操舵ガイドトルクを発生するので、車線逸脱の操舵操作が行われる場合には、操舵ガイドトルクは車線逸脱に干渉するトルクとして作用する。そのため、ドライバーが操舵ガイドトルクに起因する操舵抵抗を感じることが避けられない。
【0008】
本発明の主要な課題は、ドライバーが車線逸脱の操舵操作を行う可能性に応じて操舵ガイドトルクを修正することにより、ドライバーが車線逸脱の操舵操作を行う状況において操舵ガイドトルクに起因する操舵抵抗を感じる虞が低減されるよう改良された操舵ガイドトルク制御装置を提供することである。
【0009】
〔課題を解決するための手段及び発明の効果〕
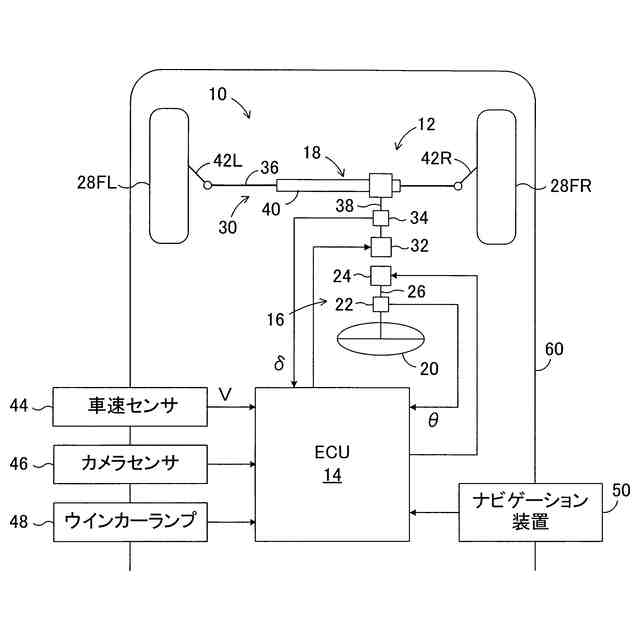
本発明によれば、ドライバーにより操舵操作される操舵入力部材(ステアリングホイール20)と、操舵入力部材に与えられる操舵操作量に応じて転舵輪(28FL、28FR)を転舵する転舵装置(18)と、操舵入力部材に操舵ガイドトルク(Tsg)を付与するトルク付与装置(反力アクチュエータ24)と、トルク付与装置を制御する制御ユニット(ECU14)と、車両(60)の前方の画像を取得する撮影装置(カメラセンサ46)と、を含む車両用操舵ガイドトルク制御装置(10)が提供される。
【0010】
制御ユニット(ECU14)は、撮影装置により取得された画像に基づいて認識した車線に沿って前記車両(60)を走行させるようにドライバーの操舵をガイドする目標操舵ガイドトルク(Tsgt)を演算し、操舵ガイドトルクが目標操舵ガイドトルクになるようにトルク付与装置(反力アクチュエータ24)を制御するよう構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電池
22日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
電池
26日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
29日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
モータ
22日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
ロータ
1か月前
トヨタ自動車株式会社
ロータ
16日前
トヨタ自動車株式会社
モータ
12日前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
負極層
12日前
トヨタ自動車株式会社
モータ
21日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
ロータ
21日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
光電極
28日前
トヨタ自動車株式会社
モータ
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ