TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127553
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024317
出願日
2024-02-21
発明の名称
プログラマブルロジックコントローラ
出願人
株式会社キーエンス
代理人
弁理士法人大塚国際特許事務所
主分類
G05B
19/05 20060101AFI20250826BHJP(制御;調整)
要約
【課題】ラダープログラムなどのユーザプログラムの実行とモーション制御との管理を容易にすること。
【解決手段】プロセッサは、ユーザプログラムに基づいて制御ロジック演算を実行する第一コアと当該ユーザプログラムに基づいてモーション制御を実行する第二コアとを有する。メモリは、第一コアによって制御ロジック演算を実行する際にアクセスされる第一変数群と、第二コアによってモーション制御を実行する際にアクセスされる第二変数群とを記憶する。管理部は、第一コアが実行する制御ロジック演算と、メモリに記憶される第一変数群のリフレッシュ処理とが順次を実行されるよう管理する。同期制御部は、第一変数群のうちモーション制御に関する変数を、リフレッシュ処理を介して、第二変数群における対応する変数と同期させる。
【選択図】図5
特許請求の範囲
【請求項1】
ユーザプログラムに基づいて制御ロジック演算を実行する第一コアと当該ユーザプログラムに基づいてモーション制御を実行する第二コアとを有するプロセッサと、
前記第一コアによって前記制御ロジック演算を実行する際にアクセスされる第一変数群と、前記第二コアによって前記モーション制御を実行する際にアクセスされる第二変数群とを記憶するメモリと、
前記第一コアが実行する制御ロジック演算と、前記メモリに記憶される前記第一変数群のリフレッシュ処理とが順次を実行されるよう管理する管理部と、
前記第一変数群のうち前記モーション制御に関する変数を、前記第二変数群における対応する変数と同期させる同期制御部と、
を有することを特徴とするプログラマブルロジックコントローラ。
続きを表示(約 1,500 文字)
【請求項2】
前記同期制御部は、予め指定されたリフレッシュ処理のタイミングにおいて、前記第一変数群のうち前記モーション制御に関する変数を、前記第二変数群のうちの前記対応する変数と同期させる、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項3】
前記同期制御部は、前記リフレッシュ処理のタイミングとして予め指定されたEND処理のタイミングにおいて、前記第一変数群のうち前記モーション制御に関する変数を、前記第二変数群のうちの前記対応する変数と同期させる、請求項2に記載のプログラマブルロジックコントローラ。
【請求項4】
前記同期制御部は、前記リフレッシュ処理のタイミングとして予め指定されたユニット間同期の実行タイミングにおいて、前記第一変数群のうち前記モーション制御に関する変数を、前記第二変数群のうちの前記対応する変数と同期させる、ことを特徴とする請求項2に記載のプログラマブルロジックコントローラ。
【請求項5】
前記同期制御部は、前記リフレッシュ処理のタイミングとして予め指定されたタスクの実行タイミングにおいて、前記第一変数群のうち前記モーション制御に関する変数を、前記第二変数群のうちの前記対応する変数と同期させる、ことを特徴とする請求項2に記載のプログラマブルロジックコントローラ。
【請求項6】
前記同期制御部は、前記第一変数群のうち前記モーション制御に関する変数が前記制御ロジック演算に対して入力される変数のときに、前記第一変数群のうち前記モーション制御に関する変数を、前記リフレッシュ処理を介して、前記第二変数群のうちの前記対応する変数と同期させる、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項7】
前記同期制御部は、前記第一変数群のうち前記モーション制御に関する変数が前記制御ロジック演算から出力される変数のときに、前記第一変数群のうち前記モーション制御に関する変数を、前記制御ロジック演算の実行に応じて前記第二変数群のうち前記対応する変数と同期させる、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項8】
前記メモリは、
前記第一コアで実行される前記制御ロジック演算により使用され、前記第一変数群を記憶する第一記憶領域と、
前記第二コアで実行される前記モーション制御により使用され、前記第二変数群を記憶する第二記憶領域と、
を有する、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項9】
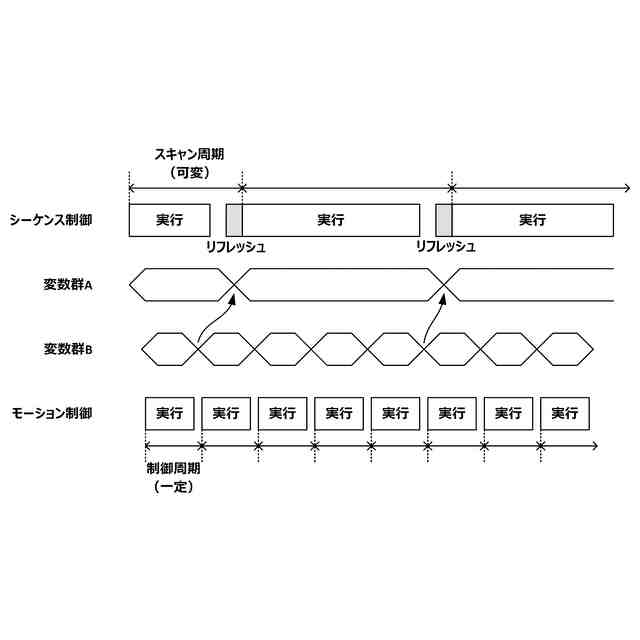
前記第一変数群は、前記ユーザプログラムのスキャン周期であって可変のスキャン周期に沿って更新され、
前記第二変数群は、前記モーション制御の制御周期であって一定の制御周期に沿って更新される、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項10】
前記第一変数群のうち前記モーション制御に関する変数を前記第二変数群における前記対応する変数と同期させるタイミングとして、END処理に代えてユニット間同期処理が選択されている場合、前記同期制御部は、前記第一変数群のうち前記モーション制御に関する変数を、ユニット間同期のタイミングで、前記第二変数群における前記対応する変数と同期させる、ことを特徴とする請求項3に記載のプログラマブルロジックコントローラ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、プログラマブルロジックコントローラに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ファクトリーオートメーションにおいてプログラマブルロジックコントローラ(PLC)は、産業機械を制御する中核的なコントローラである。PLCに接続されたモータ駆動装置(モーションユニット)によりモータを駆動することで、ワークの位置などを制御する技術はモーション制御と呼ばれている(特許文献1、2)。PLCでラダープログラムが実行されると、ラダープログラムにしたがったモーション指令値が生成され、所定タイミングでモータ等へのモーション指令値の送信が実行される。
【先行技術文献】
【特許文献】
【0003】
特開2006-107312号公報
特開2006-178818号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、プロセッサ技術の向上に伴い、PLCでもマルチコアのプロセッサを使用するケースが現れている。マルチコアのプロセッサを使用してコアごとにラダープログラムとモーションの処理を分担することにより、性能が向上し、お互いの処理が干渉し難くなる利点がある。一方で、ラダープログラムの実行により読み書きされるデータと、モーション制御により読み書きされるデータとの受け渡しが複雑になってしまう。
【0005】
そこで、本発明は、ラダープログラムなどのユーザプログラムの実行とモーション制御との管理を容易にすることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、たとえば、
ユーザプログラムに基づいて制御ロジック演算を実行する第一コアと当該ユーザプログラムに基づいてモーション制御を実行する第二コアとを有するプロセッサと、
前記第一コアによって前記制御ロジック演算を実行する際にアクセスされる第一変数群と、前記第二コアによって前記モーション制御を実行する際にアクセスされる第二変数群とを記憶するメモリと、
前記第一コアが実行する制御ロジック演算と、前記メモリに記憶される前記第一変数群のリフレッシュ処理とが順次を実行されるよう管理する管理部と、
前記第一変数群のうち前記モーション制御に関する変数を、前記リフレッシュ処理を介して前記第二変数群における対応する変数と同期させる同期制御部と、
を有することを特徴とするプログラマブルロジックコントローラを提供する。
【発明の効果】
【0007】
本発明によれば、ラダープログラムなどのユーザプログラムの実行とモーション制御との管理が容易になる。
【図面の簡単な説明】
【0008】
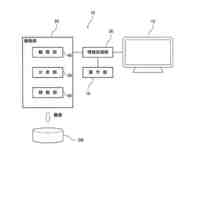
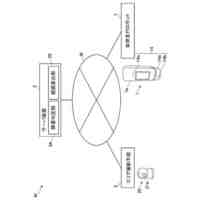
PLCシステムを説明する図
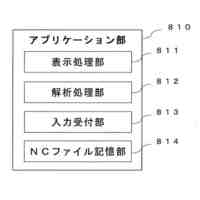
基本ユニットを説明する図
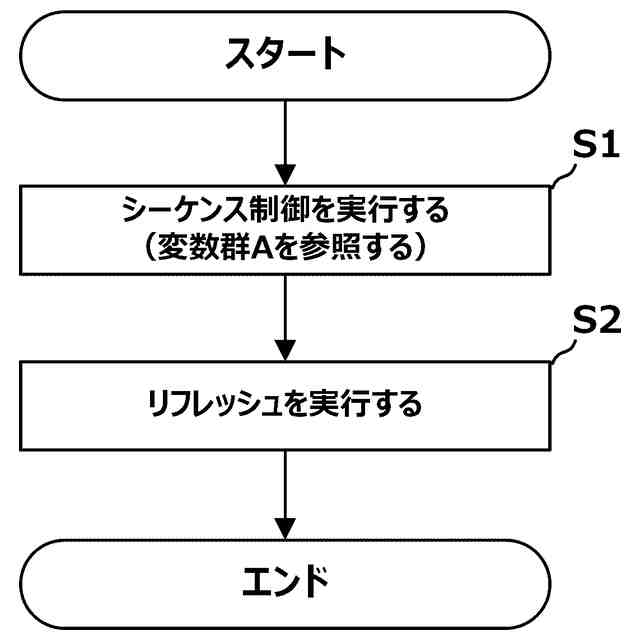
第一コアにより実行される処理を説明する図
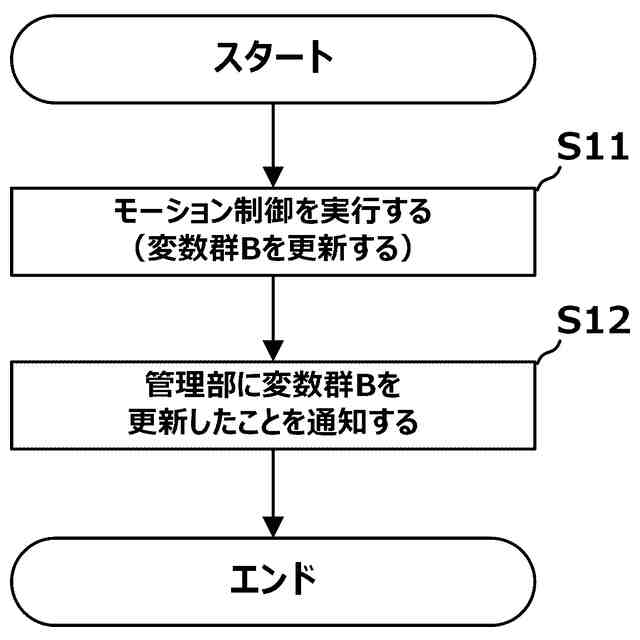
第二コアにより実行される処理を説明する図
入力変数群の同期処理を説明する図
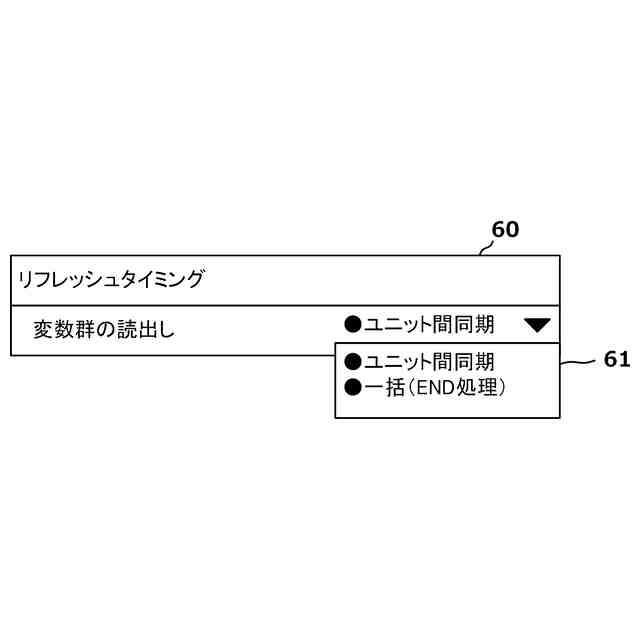
同期手法の選択するためのユーザインターフェースを説明する図
ファンクションブロックを説明する図
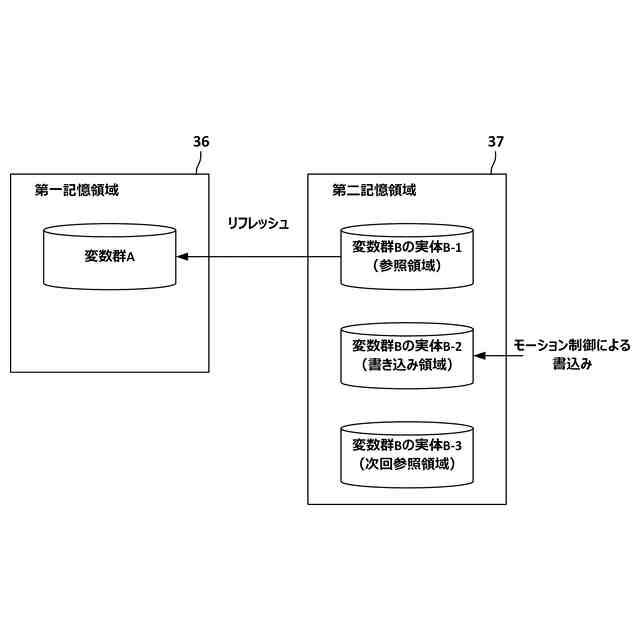
変数群を説明する図
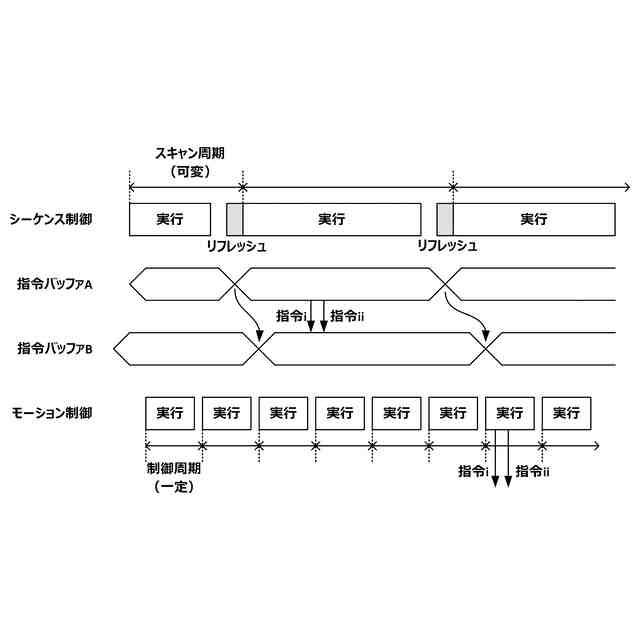
動作指令の同期方法を説明する図
出力変数の同期方法を説明する図
ファンクションブロックの実行タイミングで実行される同期処理を説明する図
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴が任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
(1)PLCシステム
図1は、本発明の実施の形態によるプログラマブル・ロジック・コントローラシステム(以下、PLCシステム1と称す。)の一構成例を示す。図1が示すように、このPLCシステム1は、ラダープログラムなどのユーザプログラムの編集を行うための設定支援装置であるPCと、工場等に設置される各種制御装置を統括的に制御するためのPLC(プログラマブルロジックコントローラ)である基本ユニット3と、拡張バス500を介して接続された複数の拡張ユニット13~15と、複数のモータドライバ4a~4cと、を備えている。複数の拡張ユニット13~15としては、例えば、モーションユニット、入力ユニット、出力ユニット、入出力ユニット(I/Oユニット)、アナログ変換ユニット、通信ユニットなど、様々なユニットが挙げられる。複数のモータドライバ4a~4cは、それぞれモータ10a、10b、10cを駆動する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社キーエンス
観察装置
5日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
23日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
9日前
株式会社ダイヘン
移動体
2か月前
ローム株式会社
基準電圧源
6日前
愛知製鋼株式会社
車両用システム
17日前
株式会社FUJI
加工機械ライン
1か月前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
ローム株式会社
半導体集積回路
3か月前
株式会社ダイフク
搬送設備
3か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
13日前
トヨタ自動車株式会社
ペダル機構
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社オプトン
制御プログラム生成装置
2か月前
株式会社鷺宮製作所
制御装置
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
株式会社ダイフク
物品搬送設備
3か月前
キヤノン株式会社
配送システム
9日前
トヨタ自動車株式会社
クラッチペダル
20日前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社CAOS
移動体の制御システム
5日前
株式会社戸張空調
アクセル・ブレーキ操作装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ