TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122141
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2025087156,2024503775
出願日
2025-05-26,2022-06-27
発明の名称
飛行中に追跡された物体に対する軌道外挿および起点決定ならびにセンサーカバレージ決定
出願人
トップゴルフ スウェーデン エービー
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
13/86 20060101AFI20250813BHJP(測定;試験)
要約
【解決手段】物体の3D飛行追跡のための、媒体-符号化コンピュータプログラム製品を含む、方法、システムおよび装置は、3次元軌道を初期観測に基づいて決定すること、3次元軌道を時間的に後方に外挿して外挿軌道を生成すること、外挿軌道と定義された物理的位置との間の距離測度を計算すること、距離測度のどれも閾値距離を満足しない場合、追加の観測を待機すること、距離測度の1つだけが閾値距離を満足して、誤差測度が予め定義された基準を満足する場合、定義された物理的位置の1つを起点として識別すること、距離測度の2つが閾値距離を満足し、第1および第2の誤差測度の1つだけが予め定義された基準を満足する場合、定義された物理的位置の1つを起点として識別すること、ならびに第1の誤差測度も第2の誤差測度も予め定義された基準を満足しない場合、追加の観測を待機することを含む方法を含む。
【効果】システムの全体的な複雑さを低減する。
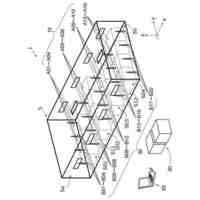
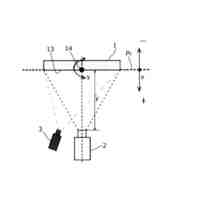
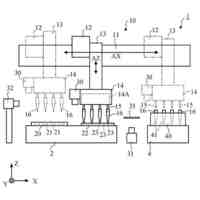
【選択図】図1
特許請求の範囲
【請求項1】
方法であって、
3次元物理的空間内に打ち込まれた少なくとも1つのゴルフボールに対する少なくとも1つの3次元軌道を、前記3次元物理的空間に隣接して配置された少なくとも1つのゴルフボールセンサーによる観測に基づいて決定することと、
前記少なくとも1つの3次元軌道に対する系統および確率的誤差を、ゴルフボール打ち出し位置、前記少なくとも1つのゴルフボールセンサーに対する位置における変動、または両方に従って計算することと、
好ましい打撃位置、前記少なくとも1つのゴルフボールセンサーに対する異なる位置、または両方を示すために、計算された系統および確率的誤差の概要を示す報告書を提示することと、
を含む、方法。
続きを表示(約 1,300 文字)
【請求項2】
前記計算することは、前記少なくとも1つの3次元軌道に対する系統および確率的誤差を前記少なくとも1つのゴルフボールセンサーに対する位置における変動に従って計算することを含み、前記方法は、より低い系統および確率的誤差を生じる前記少なくとも1つのゴルフボールセンサーに対する少なくとも1つの異なる位置を識別することを含み、かつ前記提示することは、前記少なくとも1つのゴルフボールセンサーに対して前記少なくとも1つの異なる位置を示すために前記計算された系統および確率的誤差の概要を示す報告書を提示することを含む、請求項1に記載の方法。
【請求項3】
前記少なくとも1つのゴルフボールセンサーを前記少なくとも1つの異なる位置に移動させることを含む、請求項2に記載の方法。
【請求項4】
前記計算することは、前記系統および確率的誤差を、前記少なくとも1つのゴルフボールセンサーに対するパラメータにおける変動に従って計算することを含む、請求項2に記載の方法。
【請求項5】
前記少なくとも1つのゴルフボールセンサーは、前記3次元物理的空間に隣接して配置された少なくとも2つのゴルフボールセンサーであり、前記方法は、各利用可能なティー位置に対して、前記少なくとも2つのゴルフボールセンサーに対して計算された、前記系統および確率的誤差の最も低い値を使用して前記報告書を準備することを含む、請求項4に記載の方法。
【請求項6】
前記パラメータは視野を含み、前記方法は、前記系統および確率的誤差の低いものを生じる初期視野における変動である前記少なくとも2つのゴルフボールセンサーに対する異なる視野を識別することを含み、かつ前記提示することは、前記少なくとも2つのゴルフボールセンサーに対する異なる視野を示すために前記計算された系統および確率的誤差の概要を示す報告書を提示することを含む、請求項5に記載の方法。
【請求項7】
前記少なくとも2つのゴルフボールセンサーの初期視野を前記異なる視野に調整することを含む、請求項6に記載の方法。
【請求項8】
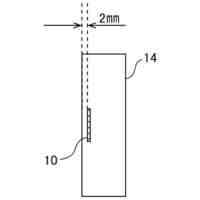
前記少なくとも1つのゴルフボールセンサーはカメラを含み、前記系統誤差を計算することは、固有の較正誤差を前記カメラの焦点距離に基づいて推定することを含む、請求項1に記載の方法。
【請求項9】
前記カメラはステレオカメラであり、前記固有の較正誤差を推定することは、前記ステレオカメラに対する視差を、前記ステレオカメラと第1の観測との間の距離に基づいて計算することを含み、かつ前記系統誤差を計算することは、前記ステレオカメラに対するステレオ較正誤差を、前記ステレオカメラの較正された回転における推定された誤差として推定することを含む、請求項8に記載の方法。
【請求項10】
前記確率的誤差を計算することは、外挿軌道に対して総計のランダム視差誤差を推定することと、前記総計のランダム視差誤差からの誤差の測度を初期観測から前記ステレオカメラに対する基線までの距離に基づいて調整することを含む、請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
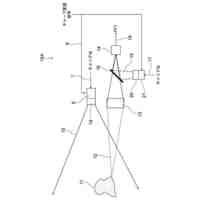
本明細書は、ゴルフボールなどの、飛行中の物体の、カメラ、レーダー、および/または他のセンサー装置から取得したデータを使用した、追跡に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
米国特許第5,413,345号は、ゴルフボールが打たれたとき、またはそれらが飛行中の後にゴルフボールを見るために、距離カメラおよびロケータカメラが位置付けられるゴルフショット追跡および分析システムを記載する。米国特許第5,413,345号で説明されるように、ロケータカメラは、ゴルフショットがティーエリアを離れるときを見て、他方、距離カメラは、ショットを予定飛行経路に沿って概ね垂直な位置から見る。その上、たとえカメラがティー上のボールを「見る」ことができない場合でさえ、飛行中のボールの特定のティーボックス起点を決定できる。加えて、米国特許公開第20180011183号は、レーダーを使用して複数の発射体を追跡するためのシステムを記載し、1つ以上のレーダー装置は、そのレーダー装置(単数または複数)の視野(ビームカバレージ)を最大限にするように位置付けられて、各レーダー装置は、それ自身の3次元レーダー座標系を定義するためにそれ自身の関連付けられたコンピュータを有することができ、中央コンピュータは、各物体が放たれた打撃ベイを識別するために各物体の軌道を後方に辿ることができる。
【発明の概要】
【0003】
本明細書は、ゴルフボールなどの、飛行中の物体を、カメラ、レーダー、および/または他のセンサー装置から取得したデータを使用して、追跡すること、ならびに具体的には、完全飛行3次元(3D)追跡中の軌道外挿および起点決定に関連する技術を説明する。
【0004】
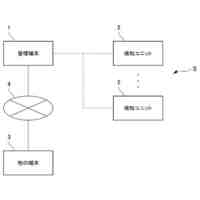
一般に、本明細書で説明される主題の1つ以上の態様は、ゴルフボールがそこから3次元物理的空間内に打ち込まれる2つ以上の定義された物理的位置、ゴルフボールが、その2つ以上の定義された物理的位置から3次元物理的空間内に打ち込まれた後に飛行中のゴルフボールを検出するために、3次元物理的空間に関して配置された1つ以上のゴルフボールセンサー、および1つ以上のゴルフボールセンサーと通信可能に結合された1つ以上のコンピュータを含む1つ以上のシステムで具現化でき、1つ以上のコンピュータは、少なくとも1つのハードウェアプロセッサおよび少なくとも1つのハードウェアプロセッサと結合された少なくとも1つのメモリ装置を含み、少なくとも1つのメモリ装置は、少なくとも1つのハードウェアプロセッサに、1つ以上のゴルフボールセンサーによるゴルフボールの初期観測に基づき3次元物理的空間内でゴルフボールに対する3次元軌道を決定すること、ゴルフボールの3次元軌道を時間的に後方に外挿して外挿軌道を生成すること、外挿軌道と2つ以上の定義された物理的位置との間の距離測度を計算すること、距離測度のどれも閾値距離を満足していない場合、1つ以上のゴルフボールセンサーによるゴルフボールの追加の観測を待機すること、を含む操作を実行させるように構成された命令を符号化する。距離測度の1つだけが閾値距離を満足する場合、1つ以上のゴルフボールセンサーによるゴルフボールの初期観測の少なくとも1つに対して推定された系統誤差および1つ以上のゴルフボールセンサーによるゴルフボールの初期観測の少なくとも1つと関連付けられた推定された確率的誤差から、距離測度の1つだけに対応する、2つ以上の定義された物理的位置の1つに対して誤差測度が形成され、誤差測度が予め定義された基準を満足する場合、2つ以上の定義された物理的位置のうちの1つが、ゴルフボールに対する起点として識別され、誤差測度が予め定義された基準を満足しない場合、1つ以上のゴルフボールセンサーは、ゴルフボールの追加の観測を待機する。距離測度の2つが閾値距離を満足する場合、第1の誤差測度が、推定された系統誤差および推定された確率的誤差から、距離測度のうちの2つの第1のものに対応する、2つ以上の定義された物理的位置の第1のものに対して形成され、第2の誤差測度が、推定された系統誤差および推定された確率的誤差から、距離測度のうちの2つの第2のものに対応する、2つ以上の定義された物理的位置の第2のものに対して形成され、第1の誤差測度が予め定義された基準を満足して、第2の誤差測度が予め定義された基準を満足しない場合、2つ以上の定義された物理的位置の第1のものが、ゴルフボールに対する起点として識別され、第2の誤差測度が予め定義された基準を満足して、第1の誤差測度が予め定義された基準を満足しない場合、2つ以上の定義された物理的位置の第2のものが、ゴルフボールに対する起点として識別され、かつ第1の誤差測度も第2の誤差測度も予め定義された基準を満足しない場合、1つ以上のゴルフボールセンサーは、ゴルフボールの追加の観測を待機する。これらおよび他の実施形態は任意選択で、以下の特徴の1つ以上を含むことができる。
【0005】
操作は、ゴルフボール追跡データを、ゴルフボールに対する起点として識別された定義された物理的位置と関連付けられたディスプレイ装置上に提示することを含むことができ、提示することは、推定された系統誤差、推定された確率的誤差、または推定された系統誤差および推定された確率的誤差の両方に基づいて、3次元物理的空間内の飛行中のゴルフボールに対する1つ以上の測定基準を選択的に提示することを含み得る。
【0006】
1つ以上の測定基準を選択的に提示することは、推定された確率的誤差を使用してボール速度に対する誤差の測度を計算すること、およびボール速度に対する誤差の測度が閾値を下回る場合、ゴルフボールに対する3次元軌道に対して計算されたボール速度値を、ディスプレイ装置上に、提示することを含み得る。1つ以上の測定基準を選択的に提示することは、推定された系統誤差および推定された確率的誤差を使用してボールスピンベクトルに対する誤差の測度を計算すること、ならびにボールスピンベクトルに対する誤差の測度が閾値を下回る場合、ゴルフボールに対する3次元軌道に対して計算されたボールスピン値を、ディスプレイ装置上に、提示することを含み得る。1つ以上の測定基準を選択的に提示することは、推定された系統誤差および推定された確率的誤差を使用して打ち出し角度に対する誤差の測度を計算すること、ならびに打ち出し角度に対する誤差の測度が閾値を下回る場合、ゴルフボールに対する3次元軌道に対して計算された打ち出し角度を、ディスプレイ装置上に、提示することを含み得る。
【0007】
ゴルフボール追跡データを、ゴルフボールに対する起点として識別された定義された物理的位置と関連付けられたディスプレイ装置上に提示することは、3次元物理的空間内の飛行中のゴルフボールに対するゴルフショットアニメーションまたはボールトレースオーバーレイを提示するのとは異なる時に1つ以上の測定基準を提示することを含み得る。
【0008】
距離測度を計算することは、外挿軌道と、2つ以上の定義された物理的位置を表す幾何形状との間の交点をチェックすることを含み得る。操作は、ゴルフボールがそこから3次元物理的空間内に打ち込まれる2つ以上の物理的位置を定義するために2人以上のゴルファーに対する打撃位置を決定すること、およびその打撃位置を使用して幾何形状の位置を指定することを含み得る。
【0009】
打撃位置を決定することは、2人以上のゴルファーのモバイル機器と通信する少なくとも1つの電子位置システムからの入力を使用することを含み得る。さらに、打撃位置を決定することは、少なくとも1つの電子位置システムを使用して所与のゴルファーのモバイル機器の位置を突き止めること、所与のゴルファーが右利きであることに応答して、モバイル機器の位置を第1の方向にオフセットして、所与のゴルファーに対する打撃位置を決定すること、および所与のゴルファーが左利きであることに応答して、モバイル機器の位置を第1の方向とは反対の、第2の方向にオフセットして、所与のゴルファーに対する打撃位置を決定することを含み得る。
【0010】
本明細書で説明される主題の1つ以上の態様は、1つ以上の方法および/または1つ以上の有形的コンピュータ可読媒体(例えば、少なくとも1つのメモリ装置)において具現化されて、少なくとも1つのハードウェアプロセッサに前述の操作を実行させるように構成された命令を符号化できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ユニパルス株式会社
力変換器
19日前
株式会社東光高岳
計器
1か月前
株式会社豊田自動織機
産業車両
26日前
横浜ゴム株式会社
音響窓
21日前
株式会社ミツトヨ
測定器
1か月前
三菱電機株式会社
計測器
13日前
日置電機株式会社
測定装置
20日前
個人
センサーを備えた装置
23日前
株式会社辰巳菱機
システム
7日前
株式会社国際電気
試験装置
1か月前
IPU株式会社
距離検出装置
19日前
日本精機株式会社
施工管理システム
23日前
株式会社東芝
センサ
22日前
株式会社FRPカジ
FRP装置
9日前
大同特殊鋼株式会社
疵検出方法
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社田中設備
報知装置
27日前
学校法人立命館
液面レベルセンサ
6日前
大和製衡株式会社
組合せ計量装置
9日前
日本精工株式会社
分注装置
5日前
富士レビオ株式会社
嵌合システム
12日前
株式会社カワタ
サンプリング装置
2日前
エグゼヴィータ株式会社
端末装置
1か月前
TDK株式会社
ガスセンサ
1日前
株式会社CAST
センサ固定治具
26日前
富士電機株式会社
エンコーダ
1か月前
富士電機株式会社
エンコーダ
1か月前
バイオテック株式会社
容器設置装置
1か月前
日本装置開発株式会社
X線検査装置
1か月前
オムロン株式会社
スイッチング装置
1か月前
WOTA株式会社
液位検出システム
1か月前
三菱マテリアル株式会社
温度センサ
5日前
アズビル株式会社
火炎状態判定装置
20日前
柳井電機工業株式会社
部材検査装置
1か月前
株式会社熊平製作所
刃物類判別装置
26日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ