TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025116548
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011035
出願日
2024-01-29
発明の名称
較正値算出装置、較正値算出システム、較正値算出方法、及びプログラム
出願人
三菱重工機械システム株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01B
11/00 20060101AFI20250801BHJP(測定;試験)
要約
【課題】キャリブレーション時に車線規制を伴わない較正値算出装置、較正値算出システム、較正値算出方法、及びプログラムを提供する。
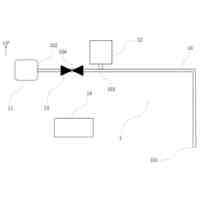
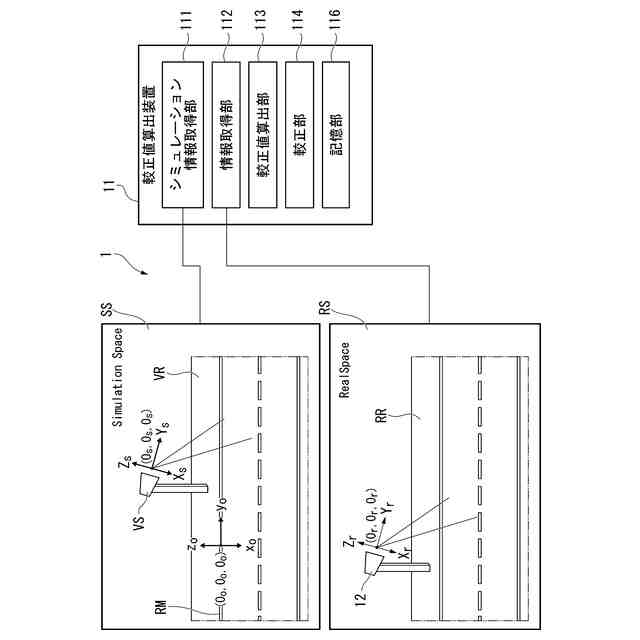
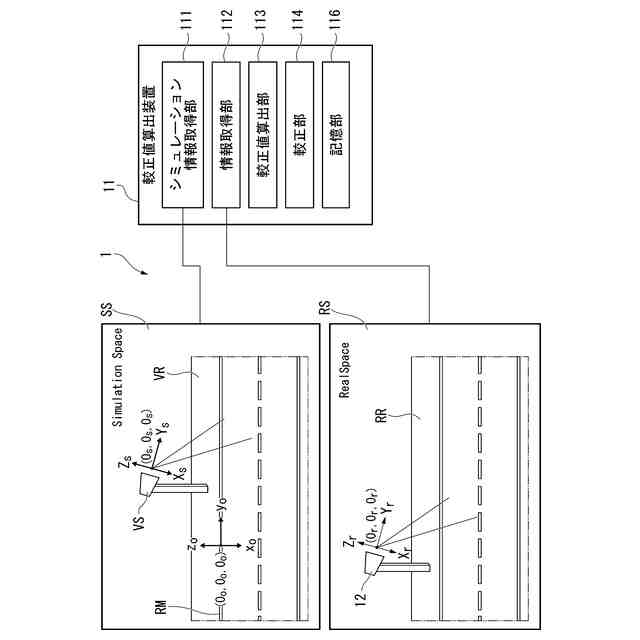
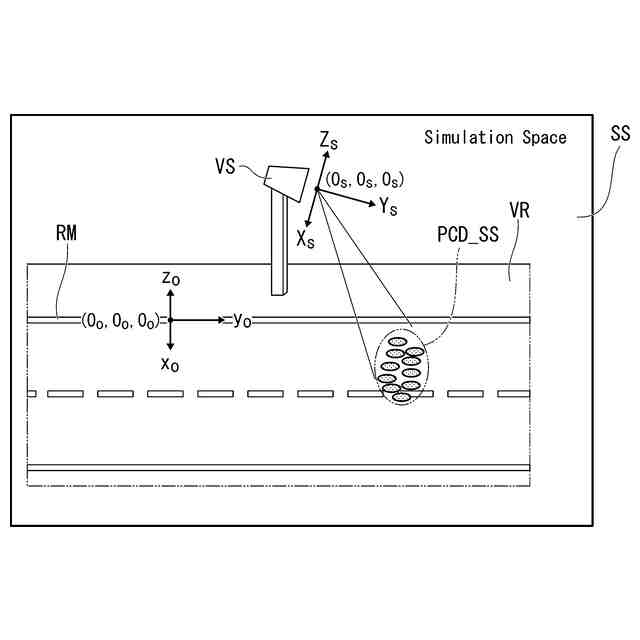
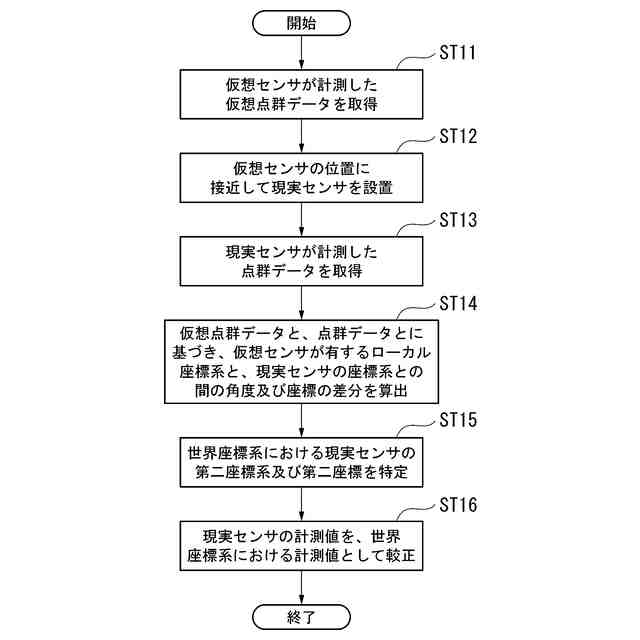
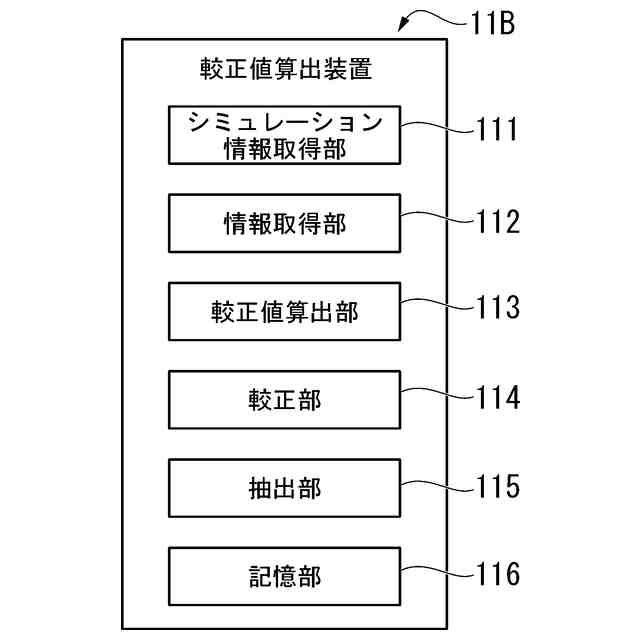
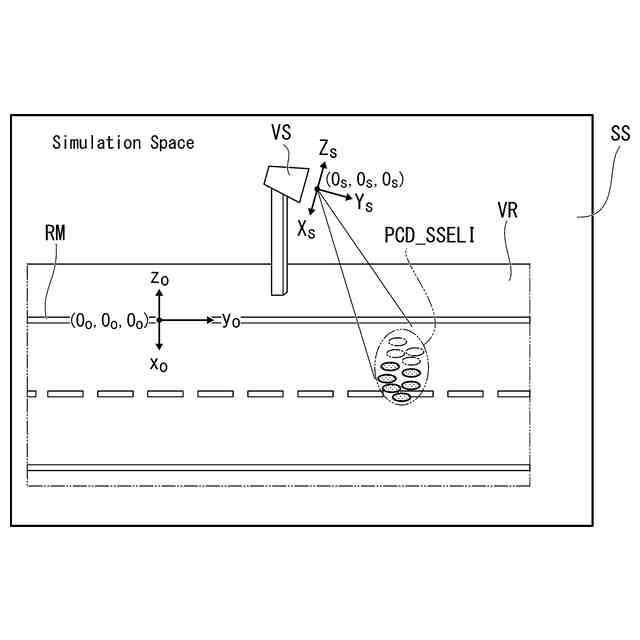
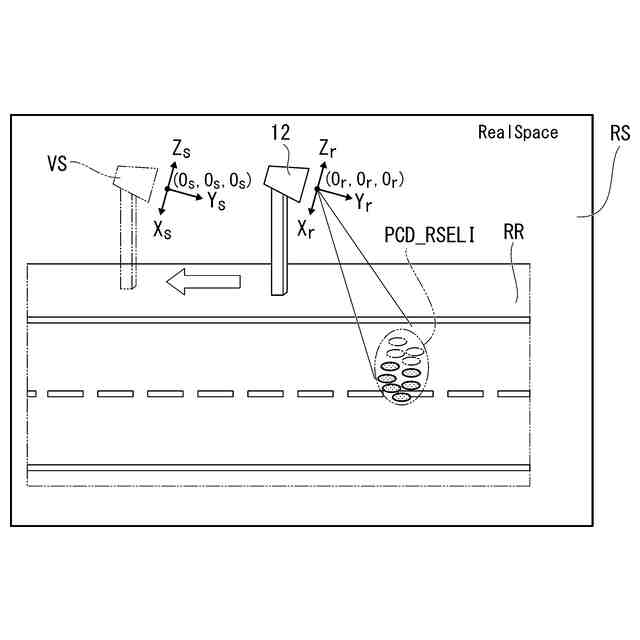
【解決手段】較正値算出装置は、仮想的に再現された路面と、仮想的に再現された仮想センサと、仮想センサ周辺の地理空間情報と、を含むシミュレーション空間上で、路面上に原点を有する世界座標系の第一座標にローカル座標系を有する仮想センサが計測した仮想の点群データである仮想点群データを取得するシミュレーション情報取得部と、仮想センサの位置に接近して現実の路面上に配置された現実センサが計測した点群データを取得する情報取得部と、仮想点群データと、点群データとに基づき、ローカル座標系と、現実センサのセンサ座標系との間の角度及び座標の差分を算出する較正値算出部と、を備える。
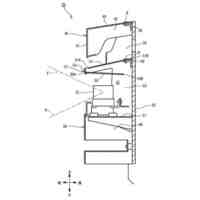
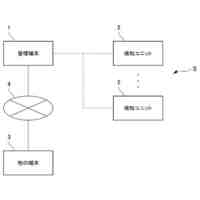
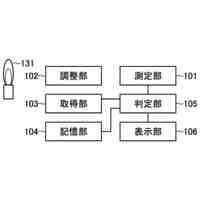
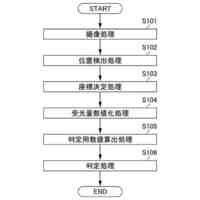
【選択図】図1
特許請求の範囲
【請求項1】
仮想的に再現された路面と、仮想的に再現された仮想センサと、前記仮想センサ周辺の地理空間情報と、を含むシミュレーション空間上で、前記路面上に原点を有する世界座標系の第一座標にローカル座標系を有する前記仮想センサが計測した仮想の点群データである仮想点群データを取得するシミュレーション情報取得部と、
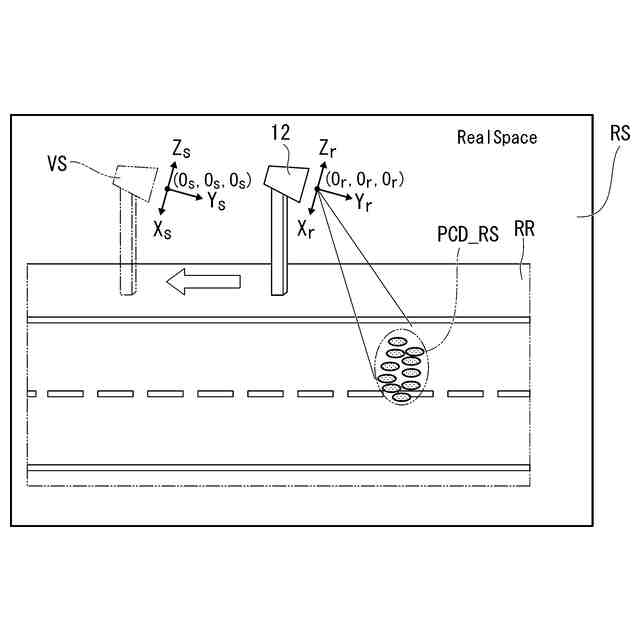
前記仮想センサの位置に接近して現実の路面上に配置された現実センサが計測した点群データを取得する情報取得部と、
前記仮想点群データと、前記点群データとに基づき、前記ローカル座標系と、前記現実センサのセンサ座標系との間の角度及び座標の差分を算出する較正値算出部と、
を備える
較正値算出装置。
続きを表示(約 960 文字)
【請求項2】
前記差分に基づき、前記現実センサの計測値を、前記世界座標系における計測値として較正する較正部と、
をさらに備える
請求項1に記載の較正値算出装置。
【請求項3】
前記仮想センサのスペック値は、前記現実センサのスペック値と同一である
請求項1又は請求項2に記載の較正値算出装置。
【請求項4】
前記仮想点群データ及び前記点群データの一部について抽出を行う抽出部と、をさらに備える
請求項1又は請求項2に記載の較正値算出装置。
【請求項5】
請求項1又は請求項2に記載の較正値算出装置と、
前記現実センサと、
を備える
較正値算出システム。
【請求項6】
仮想的に再現された路面と、仮想的に再現された仮想センサと、前記仮想センサ周辺の地理空間情報と、を含むシミュレーション空間上で、前記路面上に原点を有する世界座標系の第一座標にローカル座標系を有する前記仮想センサが計測した仮想の点群データである仮想点群データを取得するステップと、
前記仮想センサの位置に接近して現実の路面上に配置された現実センサが計測した点群データを取得するステップと、
前記仮想点群データと、前記点群データとに基づき、前記ローカル座標系と、前記現実センサのセンサ座標系との間の角度及び座標の差分を算出するステップと、
を含む
較正値算出方法。
【請求項7】
仮想的に再現された路面と、仮想的に再現された仮想センサと、前記仮想センサ周辺の地理空間情報と、を含むシミュレーション空間上で、前記路面上に原点を有する世界座標系の第一座標にローカル座標系を有する前記仮想センサが計測した仮想の点群データである仮想点群データを取得するステップと、
前記仮想センサの位置に接近して現実の路面上に配置された現実センサが計測した点群データを取得するステップと、
前記仮想点群データと、前記点群データとに基づき、前記ローカル座標系と、前記現実センサのセンサ座標系との間の角度及び座標の差分を算出するステップと、
をコンピュータに実行させる
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、較正値算出装置、較正値算出システム、較正値算出方法、及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば、特許文献1には、車両に対してレーザー光の照射を行い、その反射光を受光する。受光した反射光に基づいて、車両の位置を示す点群データを生成するレーザーセンサが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-121505号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常、このようなレーザーセンサでは、路面上に基準マーカを設置し、レーザーセンサと基準マーカとの間の距離をレーザーセンサによって計測した結果と、他の計測器によって計測した結果とを比較し、較正するキャリブレーション手法がとられている。
しかしながら、本キャリブレーション手法では、路面上に基準マーカを設置する際に、作業者が路面上に進入する必要があり、車線規制を伴う。
そのため、キャリブレーション時に車線規制を伴うという事情があった。
【0005】
本開示の目的は、上述した課題を解決する較正値算出装置、較正値算出システム、較正値算出方法、及びプログラムを提供することにある。
【0006】
本開示の目的は、キャリブレーション時に車線規制を伴わない較正値算出装置、較正値算出システム、較正値算出方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本開示の較正値算出装置は、仮想的に再現された路面と、仮想的に再現された仮想センサと、前記仮想センサ周辺の地理空間情報と、を含むシミュレーション空間上で、前記路面上に原点を有する世界座標系の第一座標にローカル座標系を有する前記仮想センサが計測した仮想の点群データである仮想点群データを取得するシミュレーション情報取得部と、前記仮想センサの位置に接近して現実の路面上に配置された現実センサが計測した点群データを取得する情報取得部と、前記仮想点群データと、前記点群データとに基づき、前記ローカル座標系と、前記現実センサのセンサ座標系との間の角度及び座標の差分を算出する較正値算出部と、を備える。
【0008】
本開示の較正値算出方法は、仮想的に再現された路面と、仮想的に再現された仮想センサと、前記仮想センサ周辺の地理空間情報と、を含むシミュレーション空間上で、前記路面上に原点を有する世界座標系の第一座標にローカル座標系を有する前記仮想センサが計測した仮想の点群データである仮想点群データを取得するステップと、前記仮想センサの位置に接近して現実の路面上に配置された現実センサが計測した点群データを取得するステップと、前記仮想点群データと、前記点群データとに基づき、前記ローカル座標系と、前記現実センサのセンサ座標系との間の角度及び座標の差分を算出するステップと、
を含む。
【0009】
本開示のプログラムは、仮想的に再現された路面と、仮想的に再現された仮想センサと、前記仮想センサ周辺の地理空間情報と、を含むシミュレーション空間上で、前記路面上に原点を有する世界座標系の第一座標にローカル座標系を有する前記仮想センサが計測した仮想の点群データである仮想点群データを取得するステップと、前記仮想センサの位置に接近して現実の路面上に配置された現実センサが計測した点群データを取得するステップと、前記仮想点群データと、前記点群データとに基づき、前記ローカル座標系と、前記現実センサのセンサ座標系との間の角度及び座標の差分を算出するステップと、をコンピュータに実行させるためのプログラムである。
【発明の効果】
【0010】
本開示の較正値算出装置、較正値算出システム、較正値算出方法、及びプログラムによれば、キャリブレーション時に車線規制を伴わない。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ユニパルス株式会社
力変換器
8日前
株式会社豊田自動織機
産業車両
15日前
三菱電機株式会社
計測器
2日前
株式会社ミツトヨ
測定器
1か月前
横浜ゴム株式会社
音響窓
10日前
株式会社国際電気
試験装置
22日前
個人
センサーを備えた装置
12日前
日置電機株式会社
測定装置
9日前
日本精機株式会社
施工管理システム
12日前
IPU株式会社
距離検出装置
8日前
大同特殊鋼株式会社
疵検出方法
1か月前
株式会社東芝
センサ
11日前
株式会社田中設備
報知装置
16日前
エグゼヴィータ株式会社
端末装置
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社CAST
センサ固定治具
15日前
富士レビオ株式会社
嵌合システム
1日前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本装置開発株式会社
X線検査装置
25日前
タカノ株式会社
試料分析装置
1か月前
アズビル株式会社
火炎状態判定装置
9日前
タカノ株式会社
試料分析装置
1か月前
バイオテック株式会社
容器設置装置
1か月前
柳井電機工業株式会社
部材検査装置
1か月前
本多電子株式会社
超音波ソナー装置
3日前
富士電機株式会社
半導体パッケージ
4日前
株式会社熊平製作所
刃物類判別装置
15日前
WOTA株式会社
液位検出システム
22日前
富士電機株式会社
エンコーダ
1か月前
富士電機株式会社
エンコーダ
1か月前
オムロン株式会社
スイッチング装置
22日前
JNC株式会社
トランジスタ型センサ
1か月前
JNC株式会社
トランジスタ型センサ
1か月前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
19日前
ジャパンプローブ株式会社
超音波探触子
1か月前
東ソー株式会社
クロマトグラムの形状判定方法
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ