TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115506
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024009985
出願日
2024-01-26
発明の名称
分注システム、分注方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01N
35/10 20060101AFI20250731BHJP(測定;試験)
要約
【課題】試液の混入を防止し、精度の良い分注ができる分注方法を提供すること。
【解決手段】分注方法は、ノズルを用いて、液体を容器に分注する方法であって、前記ノズル内の第1液体を前記容器に吐出する第1吐出ステップと、前記ノズルの先端を前記容器の内壁の第1位置に接触させる第1接触ステップと、前記ノズル内に第2液体を吸引するステップと、前記ノズル内の前記第2液体を前記容器に吐出する第2吐出ステップと、前記ノズルの先端を前記容器の内壁の前記第1位置とは異なる第2位置に接触させる第2接触ステップと、を含む。
【選択図】図7
特許請求の範囲
【請求項1】
ノズルを用いて、液体を容器に分注する方法であって、
前記ノズル内の第1液体を前記容器に吐出する第1吐出ステップと、
前記ノズルの先端を前記容器の内壁の第1位置に接触させる第1接触ステップと、
前記ノズル内に第2液体を吸引するステップと、
前記ノズル内の前記第2液体を前記容器に吐出する第2吐出ステップと、
前記ノズルの先端を前記容器の内壁の前記第1位置とは異なる第2位置に接触させる第2接触ステップと、を含む、
分注方法。
続きを表示(約 740 文字)
【請求項2】
前記ノズルは、垂直多関節型のロボットが把持し、
前記各ステップは、前記ロボットにより実行される、
請求項1に記載の分注方法。
【請求項3】
前記第1液体と、前記第2液体とは異なる成分である、
請求項1に記載の分注方法。
【請求項4】
前記第1接触ステップと前記第2接触ステップとの間には、
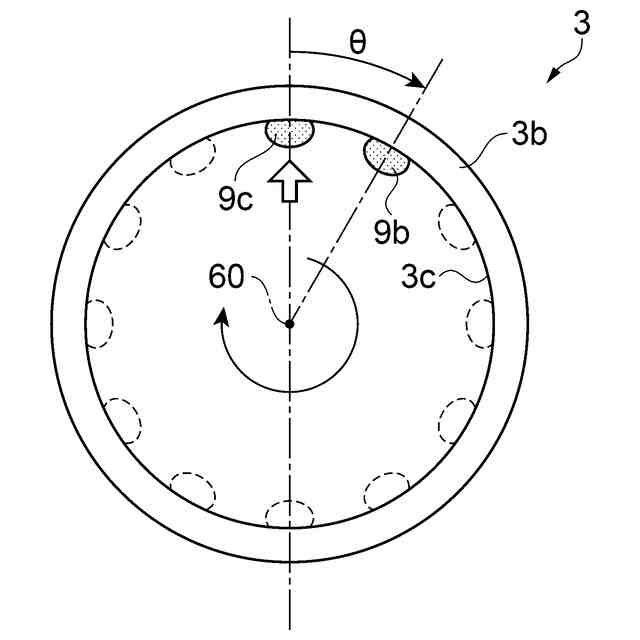
前記容器の位置、または、姿勢を変更する変更ステップを有する、
請求項1に記載の分注方法。
【請求項5】
前記変更ステップでは、前記容器を起立状態で所定の角度回転させる、
請求項4に記載の分注方法。
【請求項6】
前記第1接触ステップにおける前記ロボットによる前記ノズルの軌道を第1軌道としたときに、
前記第2接触ステップにおいて、前記ロボットは、前記第1軌道とは異なる第2軌道により、前記ノズルを前記容器の前記第2位置に接触させる、
請求項2に記載の分注方法。
【請求項7】
ノズルを用いて液体を容器に分注する分注システムであって、
前記容器を保持するステージと、
前記ノズルを把持するロボットと、を備え、
前記ロボットは、前記ノズルにより第1液体を吸引し、前記容器に吐出した後、前記ノズルの先端を前記容器の内壁の第1位置に接触させ、
前記ステージは、前記容器の姿勢を変更し、
前記ロボットは、前記ノズル内に前記第1液体とは異なる第2液体を吸引し、前記第2液体を前記容器に吐出した後、前記ノズルの先端を前記容器の内壁の前記第1位置とは異なる第2位置に接触させる、
分注システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、分注システム、および、分注方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
複数の試液をピペットなどの分注ノズルを用いて、所定量分注する分注システムが知られている。このような分注システムでは、極微量の試液を精度良く分注する必要があり、試液の注入後に、分注ノズルの先端に付着する滴の量も無視できない。
【0003】
この点に鑑み、例えば、特許文献1には、分注ノズルの角度を可変にして反応容器内壁に分注ノズル先端を接触させて、先端についている試液の滴を取り除く技術が開示されている。なお、この動作をタッチオフという。
【先行技術文献】
【特許文献】
【0004】
特開2009-145143号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の技術では、同一容器に複数の試液を分注する場合には、試液の混入が生じる虞があった。詳しくは、第1試液を分注した後、第2試液を分注しタッチオフする際に、分注ノズルの先端に第1試液の滴が付着してしまい、当該第1試液の滴が第2試液の容器内で第2試液と混入してしまう虞があった。
つまり、試液の混入を防止し、精度の良い分注ができる分注方法が求められていた。
【課題を解決するための手段】
【0006】
本願の一態様に係る分注システムは、ノズルを用いて液体を容器に分注する分注システムであって、前記容器を保持するステージと、前記ノズルを把持するロボットと、を備え、前記ロボットは、前記ノズルにより第1液体を吸引し、前記容器に吐出した後、前記ノズルの先端を前記容器の内壁の第1位置に接触させ、前記ステージは、前記容器の姿勢を変更し、前記ロボットは、前記ノズル内に前記第1液体とは異なる第2液体を吸引し、前記第2液体を前記容器に吐出した後、前記ノズルの先端を前記容器の内壁の前記第1位置とは異なる第2位置に接触させる。
【図面の簡単な説明】
【0007】
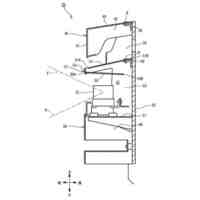
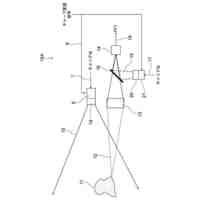
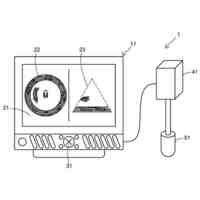
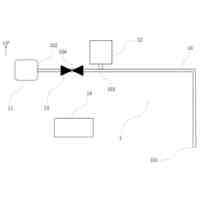
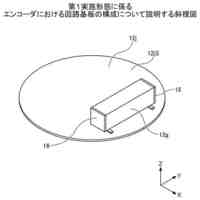
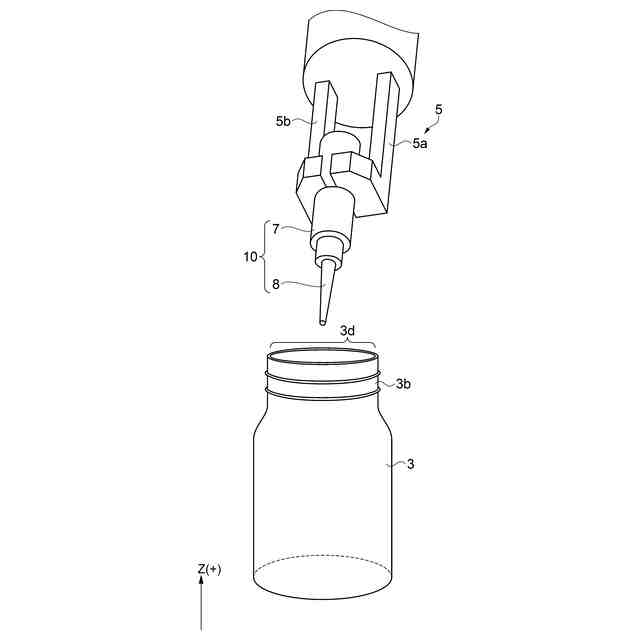
実施形態1に係る分注システムの概略構成図。
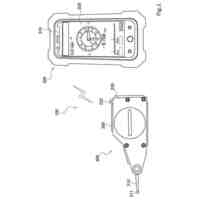
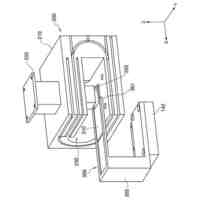
分注システムに搭載されるロボットの斜視図。
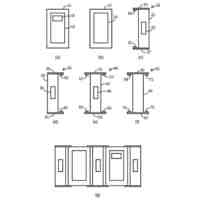
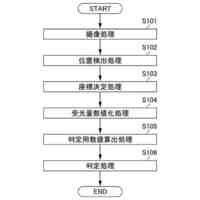
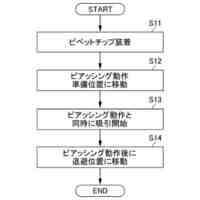
試液の分注方法の流れを示すフローチャート図。
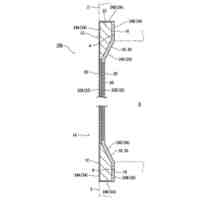
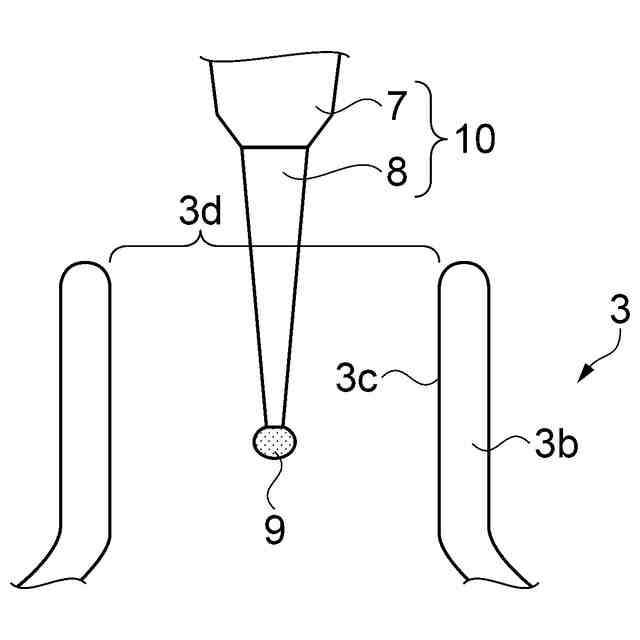
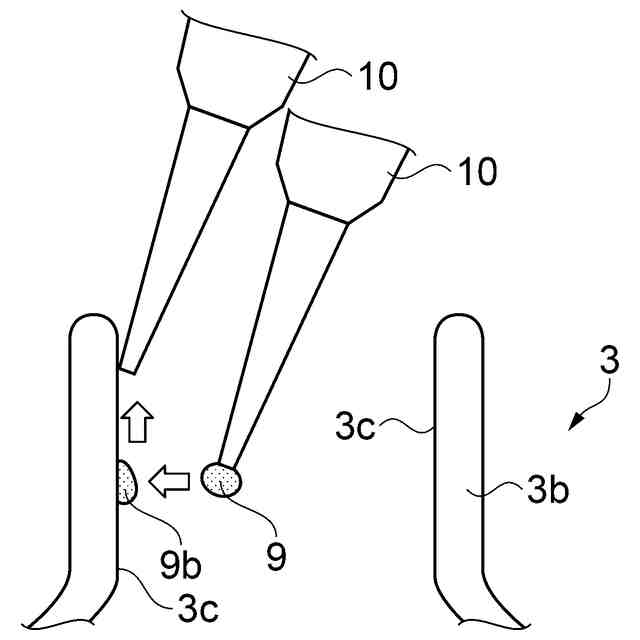
分注方法の一態様を示す図。
分注方法の一態様を示す図。
分注方法の一態様を示す図。
分注方法の一態様を示す図。
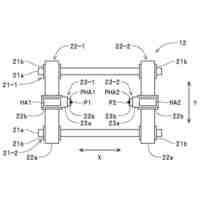
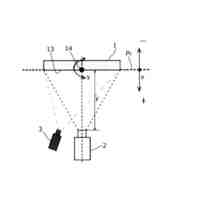
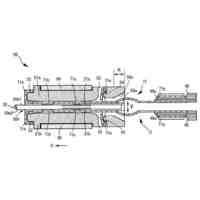
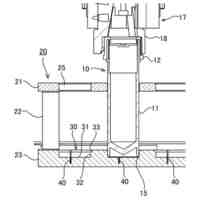
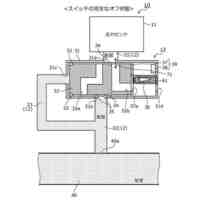
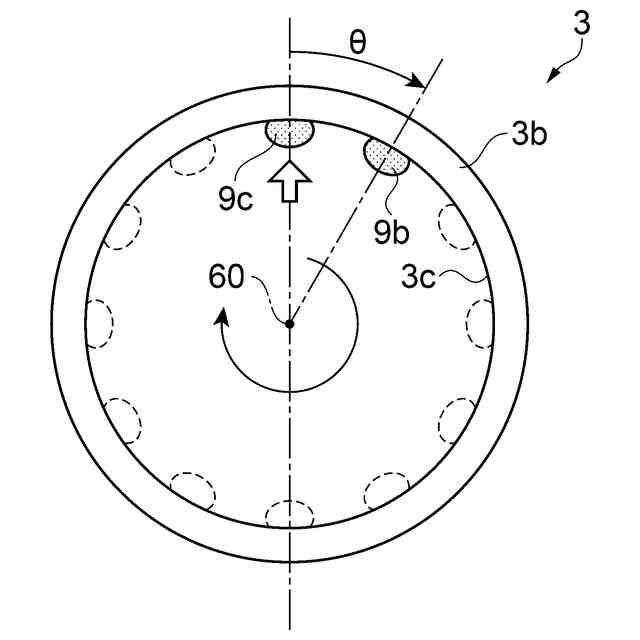
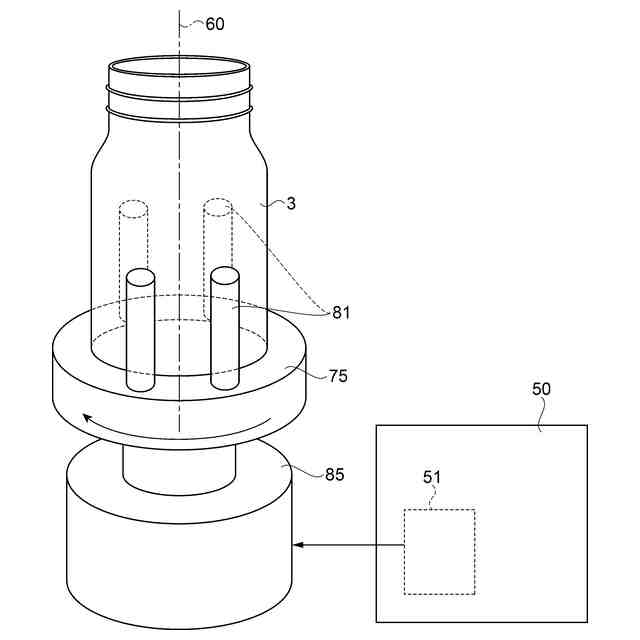
容器の回動機構の概要図。
実施形態2に係る分注方法の一態様を示す図。
【発明を実施するための形態】
【0008】
実施形態1
***分注システムの構成***
図1は、実施形態1に係る分注システムの概略構成図である。図2は、分注システムに搭載されるロボットの斜視図である。
本実施形態に係る分注システム200の構成について、図1、図2を用いて説明する。なお、各図には、互いに直交する3軸であるX軸、Y軸およびZ軸を図示している。本実施形態では、Z軸方向を鉛直方向としているが、これに限定するものではない。X軸に沿った方向を「X方向」、Y軸に沿った方向を「Y方向」、Z軸に沿った方向を「Z方向」と言う。また、各軸方向の矢印先端側を「プラス側」、矢印基端側を「マイナス側」とも言う。例えば、Y方向とは、Y方向プラス側とY方向マイナス側との両方の方向を言う。また、Z方向プラス側を「上」、Z方向マイナス側を「下」とも言う。また、以下の各図においては、説明を分かりやすくするため、実際とは異なる寸法や尺度で記載している場合がある。
【0009】
図1に示す、分注システム200は、例えば、インクの開発に関わる実験操作を自動化するラボオートメーション技術の一例であり、分注装置100、制御装置80などから構成されている。なお、インクの開発に限定するものではなく、分注システム200は精度の高い分注が必要な用途への適用が可能であり、例えば、医療、バイオテクノロジーなどのライフサイエンス分野などの用途にも好適に適用することができる。
【0010】
分注装置100は、ロボット40、試液置場71、容器置場73、試液テーブル72、蓋開閉ユニット76、容器テーブル75、蓋開閉ユニット74、ピペット置場77、チップ置場78、電子天秤79などから構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ユニパルス株式会社
力変換器
9日前
株式会社東光高岳
計器
1か月前
株式会社豊田自動織機
産業車両
16日前
横浜ゴム株式会社
音響窓
11日前
株式会社ミツトヨ
測定器
1か月前
三菱電機株式会社
計測器
3日前
日置電機株式会社
測定装置
10日前
株式会社国際電気
試験装置
23日前
個人
センサーを備えた装置
13日前
日本精機株式会社
施工管理システム
13日前
IPU株式会社
距離検出装置
9日前
株式会社東芝
センサ
12日前
大同特殊鋼株式会社
疵検出方法
1か月前
株式会社田中設備
報知装置
17日前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社CAST
センサ固定治具
16日前
富士レビオ株式会社
嵌合システム
2日前
エグゼヴィータ株式会社
端末装置
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
本多電子株式会社
超音波ソナー装置
4日前
オムロン株式会社
スイッチング装置
23日前
バイオテック株式会社
容器設置装置
1か月前
WOTA株式会社
液位検出システム
23日前
柳井電機工業株式会社
部材検査装置
1か月前
富士電機株式会社
エンコーダ
1か月前
タカノ株式会社
試料分析装置
1か月前
富士電機株式会社
エンコーダ
1か月前
タカノ株式会社
試料分析装置
1か月前
富士電機株式会社
半導体パッケージ
5日前
株式会社熊平製作所
刃物類判別装置
16日前
アズビル株式会社
火炎状態判定装置
10日前
日本装置開発株式会社
X線検査装置
26日前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
20日前
JNC株式会社
トランジスタ型センサ
1か月前
JNC株式会社
トランジスタ型センサ
1か月前
TDK株式会社
磁気検出システム
23日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ