TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025114337
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024008976
出願日
2024-01-24
発明の名称
制御システムおよび制御方法
出願人
株式会社日立ハイテクソリューションズ
代理人
弁理士法人開知
主分類
G05B
13/04 20060101AFI20250729BHJP(制御;調整)
要約
【課題】操作量の変化に対して被制御量の変化に応答遅れが生じる制御対象装置において、被制御量を目標値に正確に追従させることが可能な制御システムおよび制御方法を提供する。
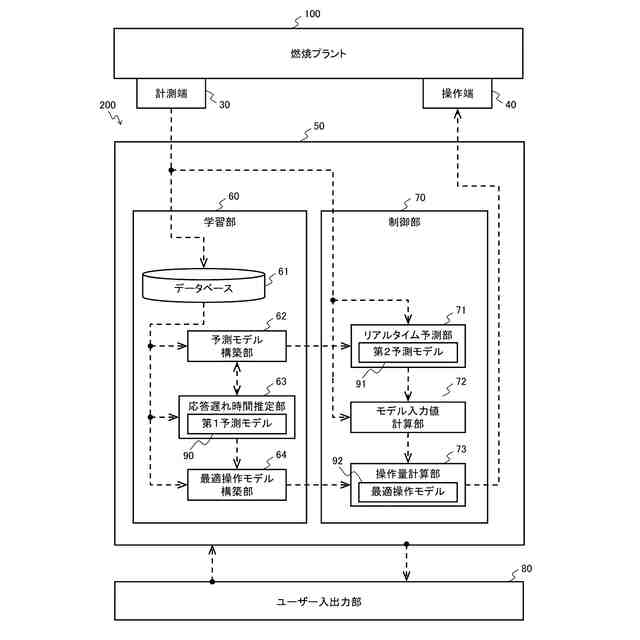
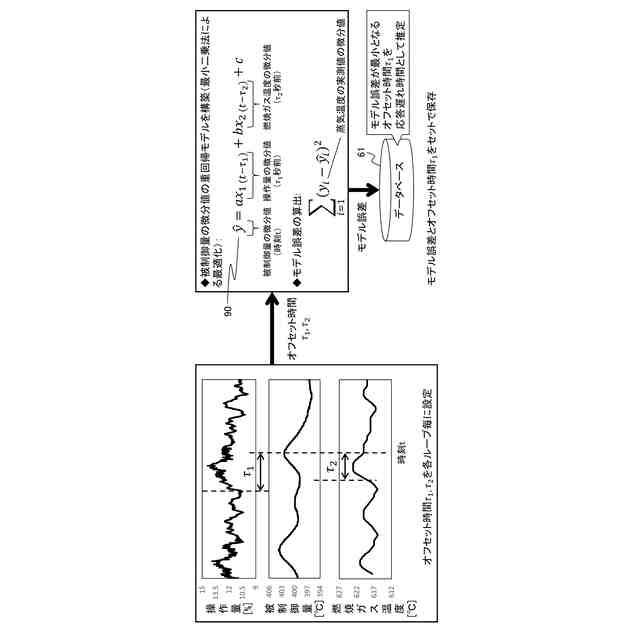
【解決手段】予測モデル構築部62は、被制御量の微分値を目的変数とし且つ前記被制御量に対してオフセット時間τ1だけ過去にオフセットした操作量の微分値を説明変数に含む第1予測モデル90を構築し、応答遅れ時間推定部63は、第1予測モデル90の出力値と前記被制御量の計測値の微分値との誤差を算出し、前記誤差が最小となるときのオフセット時間τ1を応答遅れ時間として推定し、最適操作モデル構築部64は、前記被制御量の前記応答遅れ時間後の予測値を基に算出されるモデル入力値をモデルへの入力とし且つ前記応答遅れ時間後の前記被制御量を目標値に一致させる前記操作量を出力とした最適操作モデル92を構築する。
【選択図】 図2
特許請求の範囲
【請求項1】
制御対象装置の構成部材を操作する操作端と、
前記制御対象装置の被制御量を含む状態量を計測する計測端と、
前記構成部材の操作量の変化に対する前記被制御量の変化特性を学習する学習部と、
前記状態量の計測値および前記変化特性に基づいて前記操作量を決定し、前記操作端に出力する制御部とを備えた制御システムにおいて、
前記学習部は、
前記被制御量の微分値を目的変数とし且つ前記被制御量に対してオフセット時間だけ過去にオフセットした前記操作量の微分値を説明変数に含む第1予測モデルを構築する予測モデル構築部と、
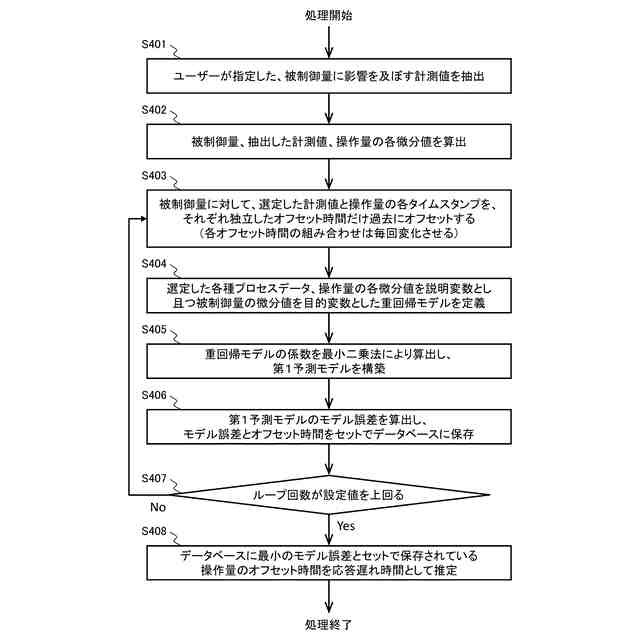
前記第1予測モデルの前記オフセット時間を変化させながら、前記第1予測モデルの出力値と前記被制御量の計測値の微分値との誤差を算出し、前記誤差が最小となるときの前記オフセット時間を応答遅れ時間として推定する応答遅れ時間推定部と、
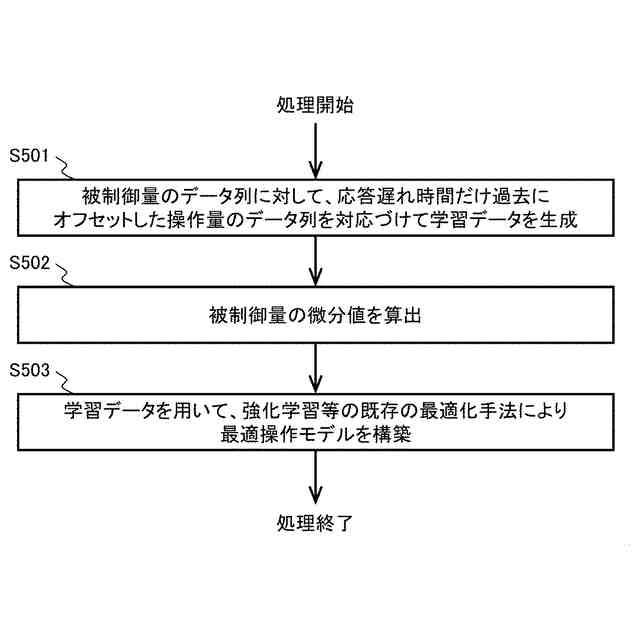
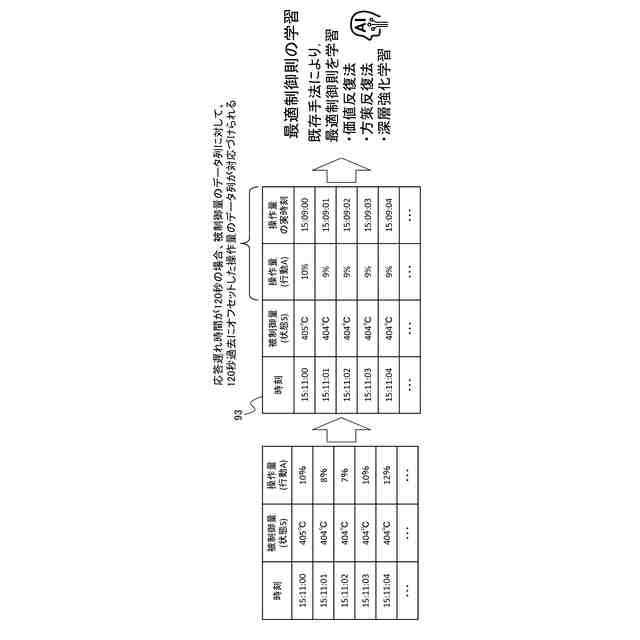
前記被制御量の計測値と前記被制御量の計測値に対して前記応答遅れ時間だけ過去にオフセットした前記操作量との対応関係を学習することにより、前記被制御量の前記応答遅れ時間後の予測値を基に算出されるモデル入力値をモデルへの入力とし且つ前記応答遅れ時間後の前記被制御量を目標値に一致させる前記操作量を出力とした最適操作モデルを構築する最適操作モデル構築部とを有する
ことを特徴とする制御システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の制御システムにおいて、
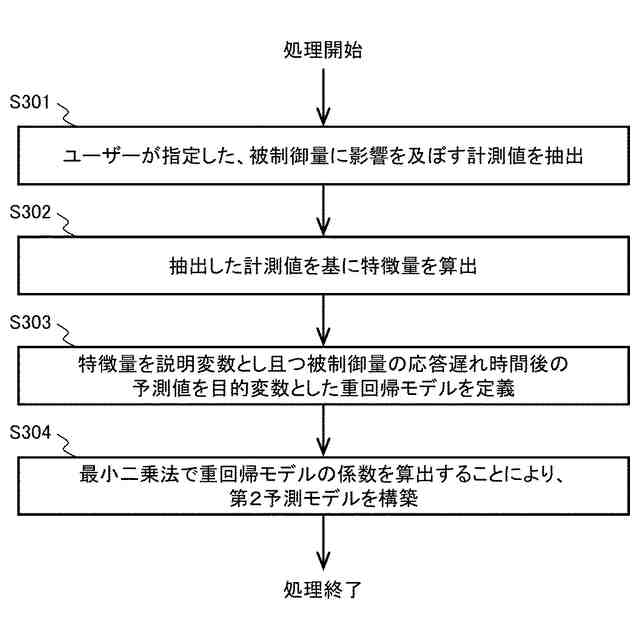
前記予測モデル構築部は、前記状態量の計測値を基に算出される特徴量を説明変数とし且つ前記予測値を目的変数とした第2予測モデルを構築し、
前記制御部は、
前記第2予測モデルを用いて前記予測値を算出するリアルタイム予測部と、
前記予測値に基づいて前記モデル入力値を算出するモデル入力値計算部と、
前記モデル入力値を前記最適操作モデルに入力して前記操作量を算出する操作量計算部とを有する
ことを特徴とする制御システム。
【請求項3】
請求項2に記載の制御システムにおいて、
前記第2予測モデルは、回帰モデルで構成され、
前記特徴量には、前記状態量の計測値の微分値、サンプリング差分値、積分値の少なくとも1つが含まれる
ことを特徴とする制御システム。
【請求項4】
請求項2に記載の制御システムにおいて、
前記モデル入力値計算部は、前記予測値と前記被制御量の計測値との重み付き平均値を前記モデル入力値として算出する
ことを特徴とする制御システム。
【請求項5】
請求項1に記載の制御システムにおいて、
前記最適操作モデル構築部は、価値反復法または強化学習によって前記最適操作モデルを構築する
ことを特徴とする制御システム。
【請求項6】
請求項1に記載の制御システムにおいて、
前記制御対象装置は、燃料であるごみを焼却させる燃焼炉と、前記燃焼炉の排熱を回収するボイラーと、前記ボイラーで発生させた蒸気が流通する配管とを備えた燃焼プラントであり、
前記構成部材は、スプレー注水により前記配管を冷却する冷却弁であり、
前記被制御量は、前記蒸気の温度であり、
前記操作量は、前記冷却弁の開度である
ことを特徴とする制御システム。
【請求項7】
制御対象装置の被制御量を含む状態量の計測値に基づいて前記制御対象装置の構成部材の操作量を決定し、前記操作量に応じて前記構成部材を操作することにより前記被制御量を制御する制御方法において、
前記被制御量の微分値を目的変数とし且つ前記被制御量に対してオフセット時間だけ過去にオフセットした前記操作量の微分値を説明変数に含む第1予測モデルを構築する第1ステップと、
前記第1予測モデルの前記オフセット時間を変化させながら、前記第1予測モデルの出力値と前記被制御量の計測値の微分値との誤差を算出し、前記誤差が最小となるときの前記オフセット時間を応答遅れ時間として推定する第2ステップと、
前記被制御量の計測値と前記被制御量の計測値に対して前記応答遅れ時間だけ過去にオフセットした前記操作量との対応関係を学習することにより、前記被制御量の前記応答遅れ時間後の予測値を基に算出されるモデル入力値をモデルへの入力とし且つ前記応答遅れ時間後の前記被制御量を目標値に一致させる前記操作量を出力とした最適操作モデルを構築する第3ステップとを備える
ことを特徴とする制御方法。
【請求項8】
請求項7に記載の制御方法において、
前記状態量の計測値を基に算出される特徴量を説明変数とし且つ前記予測値を目的変数とした第2予測モデルを構築する第4ステップと、
前記第2予測モデルを用いて前記予測値を算出する第5ステップと、
前記予測値に基づいて前記モデル入力値を算出する第6ステップと、
前記モデル入力値を前記最適操作モデルに入力して前記操作量を算出する第7ステップとを備える
ことを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、燃焼プラント等の制御対象装置を制御する制御システムおよび制御方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
燃焼プラントでは、スプレー注水を行う冷却弁の開度(操作量)を変化させてから蒸気温度(被制御量)が変化するまでに時間を要する。このように操作量の変化に対して被制御量の変化に応答遅れが生じる制御対象装置を制御する制御システムまたは制御方法を開示する先行技術文献として、例えば特許文献1がある。
【0003】
特許文献1には、燃料の反応熱エネルギーを電力に変換する火力発電装置と、自然エネルギー発電装置の未来の設定時刻における予測発電出力を算出する発電予測部と、前記予測発電出力を基に前記設定時刻における前記火力発電装置の目標発電出力を演算する目標演算部と、前記火力発電装置の発電出力が前記目標発電出力となるような前記火力発電装置への指令値を演算する指令演算部と、前記設定時刻から前記火力発電装置の応答遅延時間だけ先行して前記指令値を前記火力発電装置に出力する指令出力部とを備えたことを特徴とする火力発電設備が記載されている。特許文献1に記載の火力発電設備によれば、火力発電装置の応答遅延時間を加味して上記設定時刻に先行して火力発電装置を制御することにより、自然エネルギー発電装置及び火力発電装置の総発電出力の変動を効果的に抑制することができる。
【先行技術文献】
【特許文献】
【0004】
国際公開第2014/002274号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1には、発電出力(被制御量)を目標発電出力に一致させるための火力発電装置への指令値(操作量)を算出する方法について記載されていない。そこで、操作量の変化に対して応答遅れが生じる被制御量を目標値に一致させる操作量を算出するために、回帰型ニューラルネットワーク(RNN)による学習モデルを用いることが考えられる。RNNはそれ単体で制御モデルを成し、応答遅れに有効な制御を実現できると考えられる。しかしながら、制御モデルが非常に複雑になり、制御モデルの推論および学習時の計算負荷が大きくなるため、実装上の課題がある。
【0006】
本発明は、上記の課題に鑑みてなされたものであり、その目的は、操作量の変化に対して被制御量の変化に応答遅れが生じる制御対象装置において、被制御量を目標値に正確に追従させることが可能な制御システムおよび制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、制御対象装置の構成部材を操作する操作端と、前記制御対象装置の被制御量を含む状態量を計測する計測端と、前記構成部材の操作量の変化に対する前記被制御量の変化特性を学習する学習部と、前記状態量の計測値および前記変化特性に基づいて前記操作量を決定し、前記操作端に出力する制御部とを備えた制御システムにおいて、前記学習部は、前記被制御量の微分値を目的変数とし且つ前記被制御量に対してオフセット時間だけ過去にオフセットした前記操作量の微分値を説明変数に含む第1予測モデルを構築する予測モデル構築部と、前記第1予測モデルの前記オフセット時間を変化させながら、前記第1予測モデルの出力値と前記被制御量の計測値の微分値との誤差を算出し、前記誤差が最小となるときの前記オフセット時間を応答遅れ時間として推定する応答遅れ時間推定部と、前記被制御量の計測値と前記被制御量の計測値に対して前記応答遅れ時間だけ過去にオフセットした前記操作量との対応関係を学習することにより、前記被制御量の前記応答遅れ時間後の予測値を基に算出されるモデル入力値をモデルへの入力とし且つ前記応答遅れ時間後の前記被制御量を目標値に一致させる前記操作量を出力とした最適操作モデルを構築する最適操作モデル構築部とを有するものとする。
【0008】
また、本発明は、制御対象装置の被制御量を含む状態量の計測値に基づいて前記制御対象装置の構成部材の操作量を決定し、前記操作量に応じて前記構成部材を操作することにより前記被制御量を制御する制御方法において、前記被制御量の微分値を目的変数とし且つ前記被制御量に対してオフセット時間だけ過去にオフセットした前記操作量の微分値を説明変数に含む第1予測モデルを構築する第1ステップと、前記第1予測モデルの前記オフセット時間を変化させながら、前記第1予測モデルの出力値と前記被制御量の計測値の微分値との誤差を算出し、前記誤差が最小となるときの前記オフセット時間を応答遅れ時間として推定する第2ステップと、前記被制御量の計測値と前記被制御量の計測値に対して前記応答遅れ時間だけ過去にオフセットした前記操作量との対応関係を学習することにより、前記被制御量の前記応答遅れ時間後の予測値を基に算出されるモデル入力値をモデルへの入力とし且つ前記応答遅れ時間後の前記被制御量を目標値に一致させる前記操作量を出力とした最適操作モデルを構築する第3ステップとを備えるものとする。
【発明の効果】
【0009】
本発明によれば、操作量の変化に対して被制御量の変化に応答遅れが生じる制御対象装置において、被制御量を目標値に正確に追従させることが可能となる。
【図面の簡単な説明】
【0010】
燃焼プラントの全体的な構成を示す概略図である。
燃焼プラントを制御する制御システムの構成図である。
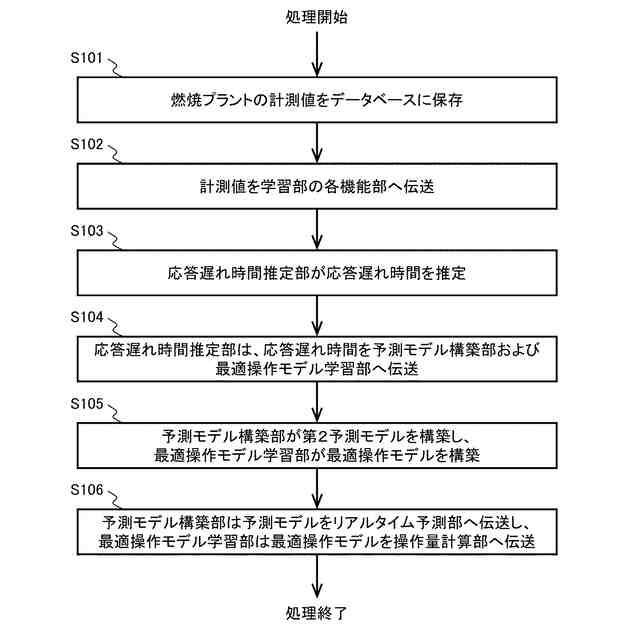
学習部の処理を示すフロー図である。
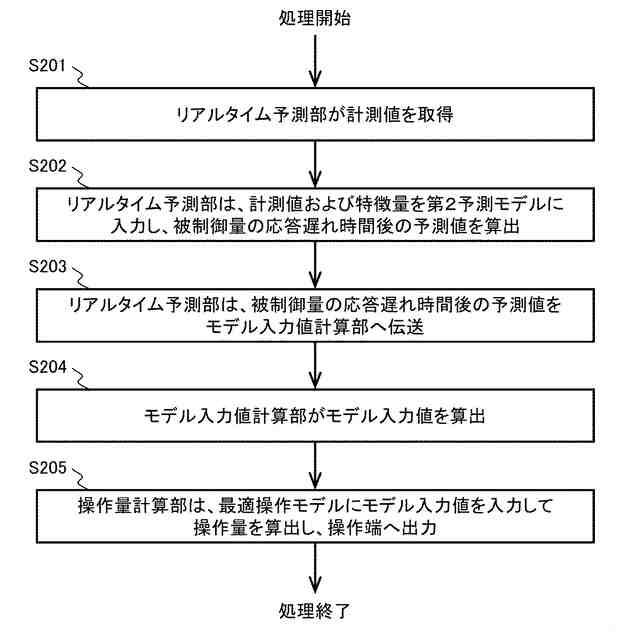
制御部の処理を示すフロー図である。
予測モデル構築部の処理を示すフロー図である。
応答遅れ時間推定部の処理を示すフロー図である。
応答遅れ時間推定部の処理を示す概念図である。
最適操作モデル構築部の処理を示すフロー図である。
最適操作モデル構築部の処理を示す概念図である。
ユーザー入出力部に表示される操作画面の一例を示す図である。
ユーザー入出力部に表示される制御結果画面の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
18日前
ローム株式会社
半導体集積回路
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
7日前
株式会社ダイフク
搬送設備
1か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ペダル機構
2か月前
トヨタ自動車株式会社
生産管理システム
4日前
三菱電機株式会社
自己位置推定装置
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
27日前
トヨタ自動車株式会社
減圧弁
1日前
株式会社鷺宮製作所
制御装置
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
11日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社テイエルブイ
減圧弁の制御装置
13日前
アズビル株式会社
制御システムおよび制御方法
7日前
アズビル株式会社
制御システムおよび制御方法
7日前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
三菱電機株式会社
電源回路
27日前
株式会社計数技研
移動体、及びプログラム
2か月前
オムロン株式会社
安全装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
ローム株式会社
半導体装置
2か月前
株式会社ダイヘン
搬送車
2か月前
ミツミ電機株式会社
電源回路および駆動回路
7日前
株式会社ダイフク
飛行体制御システム
29日前
日本信号株式会社
自走式装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ