TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025106419
公報種別
公開特許公報(A)
公開日
2025-07-15
出願番号
2025063023,2023000146
出願日
2025-04-07,2018-04-27
発明の名称
センサ構成及び消磁機能のうちの少なくとも一方を備えた磁気結合デバイス
出願人
マグスウィッチ テクノロジー インコーポレイテッド
,
MAGSWITCH TECHNOLOGY INC.
代理人
個人
,
個人
,
個人
主分類
B25J
15/06 20060101AFI20250708BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
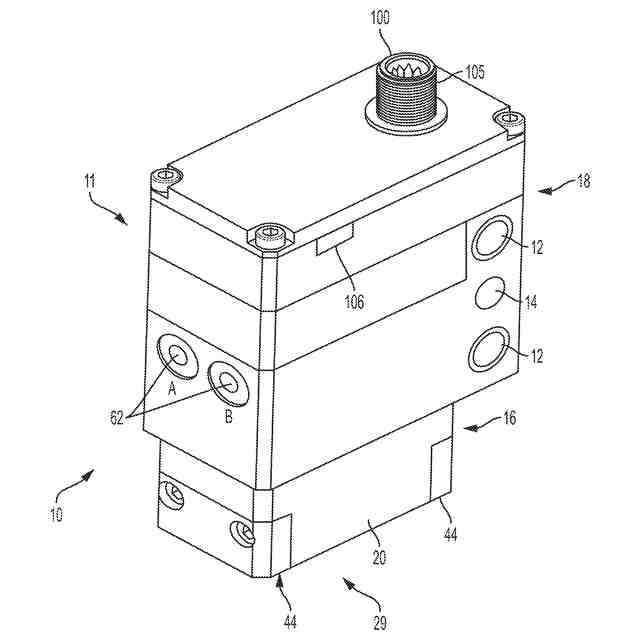
【課題】磁場センサを有する磁気結合デバイスを提供する。
【解決手段】磁気結合デバイスは、磁気結合デバイスのポール延長シューの周りに巻き付けられた消磁用コイルを含んでよい。
【選択図】図1
特許請求の範囲
【請求項1】
強磁性被加工物に磁気結合するための、磁気結合デバイスであって、
複数の離間したポール部分であって、該複数の離間したポール部分の各々が、前記強磁性被加工物に接触するための被加工物接触インタフェースを有する、ポール部分;
複数の永久磁石を含む、磁束源であって、前記複数の永久磁石は、第1の永久磁石と第2の永久磁石とを含み、前記磁束源は、磁束の第1のレベルが前記複数の離間したポール部分の前記被加工物接触インタフェースにおいて得られる第1の状態、および、磁束の第2のレベルが前記複数の離間したポール部分の前記被加工物接触インタフェースにおいて得られる第2の状態を有し、前記第2のレベルは前記第1のレベルよりも小さい、磁束源;
複数のセンサであって、少なくとも1つの磁場センサを含む、センサ;および
前記複数のセンサに基づいて、前記複数の離間したポール部分の前記被加工物接触インタフェースの前記強磁性被加工物に対する近接度および相対的な配向を決定するように動作可能である、コントローラ、
を含む、磁気結合デバイス。
続きを表示(約 1,400 文字)
【請求項2】
前記複数の離間したポール部分の前記被加工物接触インタフェースに対する前記近接度が第1の距離にある時に、前記磁束源は、前記第1の状態に設定され、前記複数の離間したポール部分の前記被加工物接触インタフェースに対する前記近接度が第2の距離にある時に、前記磁束源は、前記第2の状態に設定され、前記第2の距離は前記第1の距離よりも大きい、請求項1に記載の磁気結合デバイス。
【請求項3】
前記複数のセンサが、前記複数の離間したポール部分の第1のポール部分に近接して位置決めされている第1のセンサおよび前記複数の離間したポール部分の第2のポール部分に近接して位置決めされている第2のセンサを含み、前記コントローラは、前記第1のセンサおよび前記第2のセンサに基づいて、前記複数の離間したポール部分の前記被加工物接触インタフェースの前記強磁性被加工物に対する前記相対的な配向を決定する、請求項1に記載の磁気結合デバイス。
【請求項4】
第1の相対的な配向は、前記複数の離間したポール部分の第1のポール部分と前記複数の離間したポール部分の第2のポール部分との間に延びる第1の方向に沿った角度の配向である、請求項1に記載の磁気結合デバイス。
【請求項5】
第2の相対的な配向は、前記第1の方向と直交する第2の方向に沿った角度の配向であり、前記第1の方向は、ロール軸であり、前記第2の方向は、ピッチ軸である、請求項4に記載の磁気結合デバイス。
【請求項6】
前記第1のセンサおよび前記第2のセンサが、磁場センサである、請求項3に記載の磁気結合デバイス。
【請求項7】
前記コントローラは、前記強磁性被加工物についての既知の複数のパラメータおよび前記複数のセンサの保存された複数のセンサ値に基づいて、前記強磁性被加工物に対する前記複数の離間したポール部分の前記被加工物接触インタフェースの前記近接度および前記配向を決定する、請求項1に記載の磁気結合デバイス。
【請求項8】
前記複数のセンサが、第1のセンサ、第2のセンサ、第3のセンサ、および、第4のセンサを含み、前記第1のセンサは、前記複数の離間したポール部分の第1のポール部分に近接し、前記第3のセンサは、前記複数の離間したポール部分の第2のポール部分に近接し、前記コントローラは、前記第1のセンサ、前記第2のセンサ、前記第3のセンサ、および、前記第4のセンサに基づいて、前記複数の離間したポール部分の前記被加工物接触インタフェースの前記強磁性被加工物に対する前記相対的な配向を決定する、請求項1に記載の磁気結合デバイス。
【請求項9】
前記コントローラは、前記第1のセンサおよび前記第3のセンサに基づいて、前記複数のポール部分の第1のポール部分と前記複数のポール部分の第2のポール部分の間に延びる第1の方向に沿って、前記複数の離間したポール部分の前記被加工物接触インタフェースの前記強磁性被加工物に対する前記相対的な配向を決定する、請求項8に記載の磁気結合デバイス。
【請求項10】
前記コントローラは、前記第2のセンサおよび前記第4のセンサに基づいて、前記第1の方向とは角度を成す第2の方向に沿って、前記複数の離間したポール部分の前記被加工物接触インタフェースの前記強磁性被加工物に対する前記相対的な配向を決定する、請求項9に記載の磁気結合デバイス。
(【請求項11】以降は省略されています)
発明の詳細な説明
【関連出願】
【0001】
本出願は、2017年4月27日出願の米国仮特許出願第62/490,705号「センサ構成を備えた磁気結合ツール」、及び2017年4月27日出願の米国仮特許出願第62/490,706号「消磁機能を備えた磁気結合ツール」の利益を主張するものである。
続きを表示(約 2,400 文字)
【技術分野】
【0002】
本開示は磁気結合デバイスに関し、上記磁気結合デバイスは、磁気結合デバイスと強磁性被加工物との間の磁気回路の品質、並びに磁気結合デバイスと強磁性被加工物との間の相対位置を示す、1つ以上のパラメータを決定するための、少なくとも1つのセンサを有する。更に、上記磁気結合デバイスは、消磁機能を含んでよい。
【背景技術】
【0003】
磁場を用いて強磁性ターゲットをデバイスの作業面に引き付ける及び/又は固定する、多数のデバイスが存在する。例としては、被加工物チャック、永久磁石持ち上げ装置、磁気ラッチ、磁気ツールスタンド等といった、磁気クランプデバイスが挙げられる。
【0004】
一般に、このようなデバイスの大半は、1つ以上の磁束の源を含む。これらの源としては、電磁石、永久電磁石、切替式永久磁石ユニット又は構成、及びこれらの組み合わせが挙げられる。1つ以上の磁石が、上記ターゲットが磁気によって固定されることになるデバイスの1つ以上の作業面に対して供給する磁束を伝達するために、磁気作業回路の作成には、高透磁率ポールシュー又はガイドが使用されることが多い。
【0005】
多くの用途において、また実際の工作における観点から、このようなデバイスのユーザは主に、作業面においてターゲットに作用する実際の(引張)力を決定することに関心を向け、そうでなければ、デバイスに採用される1つ以上の磁石の定格データにアクセスすることに関心を向け、上記定格データは、磁気作業回路のデバイス内部部品の他の全ての側面が理想的なものであるとして、上記磁石のガウス定格を含む。そして上記ガウス定格により、上記1つ以上の磁石がターゲットに与えることができる理論上の最大引張力を、確立された式を用いて決定でき、ここで、ターゲットのサイズ、幾何学的形状、及び強磁性組成により、ターゲットを磁気的に完全に飽和させることができる。即ち、磁石、ポールシュー及びターゲットからなる回路の外側、特に作業面には、漂遊磁束線が全く、又は無視できる程度にしか存在しないと想定され、ここで、ポールシューとターゲットとの間には「空隙(air gap)」が存在することが多く、これは引張力に悪影響を及ぼす。一部の磁石製造元は、実験室での試験に基づいて、磁石の最大引張力定格値も提供している。
【0006】
磁気デバイスがターゲットに及ぼす実際の引張力は、磁石のガウス定格から決定できるもの、又は実験によって決定される定格最大引張力とは異なるものとなることが知られている。実際の又は有効な引張力は、ポールシュー‐ターゲット間の境界における不均一な接触(即ち上記境界における空隙の存在)、ポールシュー‐ターゲット間の境界が上記境界の磁束線に対して垂直でないこと、ターゲットが「薄い(thin)」寸法を有すること(これは、ターゲット、標的表面の幾何学的形状及びコーティングを通過して外側へと延在する磁束線(漂遊及び磁束漏れ)につながる)等を含む、多数の因子によって低減される。
【0007】
ロボットアーム及び他の位置決めデバイスを用いて、デバイスをターゲットから離れた動作位置とターゲットに近い動作位置との間で移動させる磁気デバイスにおいては、引張力以外の更なる因子、例えばデバイスの作業面がターゲットの特定の領域又はゾーンに対面するような、デバイスの正確な位置決めの必要性を考慮する必要があり、上記領域又はゾーンは、プレート又は薄型シート金属打抜き加工物のような単純な幾何学的形状から、エンジンカムシャフトといった、より複雑な多曲面形状にまで及び得る。
【0008】
これらの変数のうちの多くは、このような磁気デバイスの使用において予測が困難又は不可能であるため、ターゲットがデバイスの作業面に安全に取り付けられ、また取り付けられたままであるかどうか、及び引張力が安全又は定格閾値内のままであるかどうかに関して、磁気作業回路の外部部品に関連する定性的及び定量的パラメータに関する使用時のリアルタイムの情報を得るために、多様な操作方法及び測定システムが提案され、このような磁気デバイスに組み込まれている。
【0009】
磁気グリッパは、産業的オートメーションにおいて鋼鉄製被加工物を取り扱うための一般的なツールである。これらは、大きな保持力を達成し、またロボットシステムへの組み込みが比較的簡単であるが、以下のような具体的な課題を有する。産業分野で利用される多くの磁気グリッパは、空気圧式アクチュエータによって動力供給される。これにより、大半の磁気グリッパと、完全に自動化されたプロセスの制御用電子機器とのインタフェース接続が妨げられる。磁気グリッパと制御用電子機器との間のインタフェース接続がなければ、ロボット(及びオペレータ)にとって、ツールの状態又は被加工物の取り扱い性能に関する磁気グリッパからのフィードバックを得る容易な方法がなくなる。
【0010】
産業分野において、上記に関する1つの一般的な方法は、磁気グリッパの外側に追加のセンサを設けることにより、ツールが完全にオン若しくは完全にオフになったとき、又はターゲットである部品が磁気グリッパの作業面に接触したとき等といった、様々なツールの状態を検出することである。センサを追加するというこのような方法は機能するものの、多数の追加の特定機能用センサを追加するにはコストがかかる。更に、ツールの外側に追加されたセンサは、ロボットの運動、動作、及び周囲環境からの損傷に弱い。また、追加のセンサによって配線が複雑になり、これによりロボットアームの組み込みがより高コストかつ困難になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
25日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
14日前
株式会社ダイヘン
移動体
1か月前
住友重機械工業株式会社
教示装置
11日前
株式会社ダイヘン
搬送装置
18日前
個人
ペグハンマおよびペグハンマ用部品
18日前
川崎重工業株式会社
ロボット
12日前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
11日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
11日前
住友重機械工業株式会社
支援装置
18日前
住友重機械工業株式会社
支援装置
18日前
株式会社マキタ
電気機器
12日前
オークラ輸送機株式会社
ハンド装置
1か月前
アピュアン株式会社
衝撃工具
20日前
株式会社スター精機
産業用ロボット
1か月前
ホシデン株式会社
分解用治具
18日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社リコー
多関節ロボット
18日前
工機ホールディングス株式会社
作業機
14日前
工機ホールディングス株式会社
作業機
14日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
14日前
工機ホールディングス株式会社
作業機
14日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社ジャノメ
ロボット
1か月前
SMC株式会社
ベルヌーイグリッパ
14日前
株式会社ダイヘン
ロボット制御システム
1か月前
セイコーエプソン株式会社
ロボット
28日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ


































