TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105697
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2025068993,2022517135
出願日
2025-04-18,2020-09-16
発明の名称
自律レーザ雑草根絶
出願人
カーボン オートノマス ロボティック システムズ, インコーポレイテッド
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
A01M
21/04 20060101AFI20250703BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動雑草識別、制御、および根絶のために採用され得る方法、デバイス、モジュール、およびシステムを提供すること。
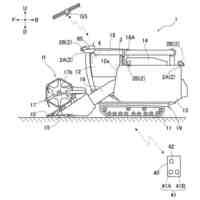
【解決手段】自動雑草識別、制御、および根絶のために採用され得る方法、デバイス、モジュール、およびシステムが、本明細書において開示される。これらの方法、デバイス、モジュール、およびシステムは、手動栽培または化学除草剤の代替物を提供する。本明細書に開示されるデバイスは、雑草を焼くことまたは照射することを行い得るレーザビーム等のビームを用いて、雑草の位置を特定し、識別し、自律的に標的化するように構成され得る。方法、デバイス、モジュール、およびシステムは、農作物管理のために、または家庭用雑草制御のために使用され得る。
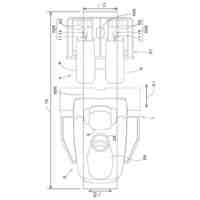
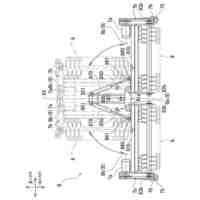
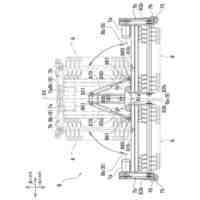
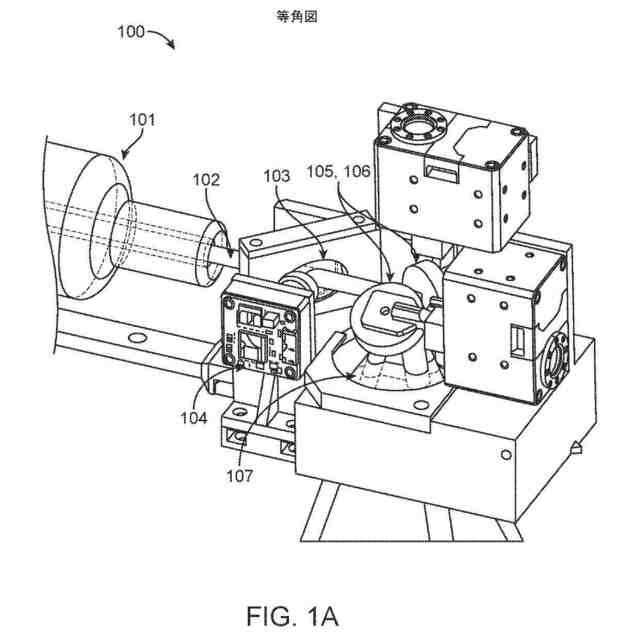
【選択図】図1A
特許請求の範囲
【請求項1】
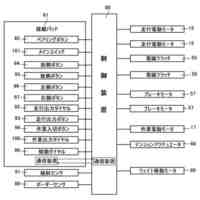
植物を損傷または死滅させるためのシステムであって、前記システムは、
畑内の植物の画像を捕捉するように構成された第1のカメラと、
前記畑内の植物の画像を捕捉するように構成された第2のカメラと、
光ビームを放出するように構成された光源と、
1つ以上のアクチュエータを備える制御システムであって、前記制御システムは、前記光ビームの光学経路を方向付けるように構成されている、制御システムと、
コンピューティングシステムと
を備え、
前記コンピューティングシステムは、
第1の時間において前記第1のカメラによって捕捉される前記畑内の少なくとも1つの植物の第1の画像を受信することと、
前記第1の画像内の植物を識別することであって、前記植物を識別することは、雑草と作物とを区別するように構成されたアルゴリズムを使用して実施される、ことと、
前記第1の画像に基づいて前記植物の場所を予測することと、
前記第2のカメラに、前記予測された場所を含む前記畑の領域の第2の画像を捕捉させることと、
前記第1の時間よりも後の第2の時間において、前記第2の画像内の前記植物の標的場所を予測することであって、前記標的場所を予測することは、前記第1の時間と前記第2の時間との間の経過時間中の表面に対する前記第2のカメラの運動を考慮する、ことと、
前記制御システムに、前記予測された標的場所に向かって前記光ビームの前記光学経路を方向付けさせることと、
前記光源に、前記植物を損傷または死滅させるのに十分な時間の長さにわたって前記植物の前記予測された標的場所に向かって前記光ビームを放出させることと
を含む動作を実施するように構成されている、システム。
続きを表示(約 710 文字)
【請求項2】
前記第1の画像内の植物を識別することは、ニューラルネットワークを使用して実施される、請求項1に記載のシステム。
【請求項3】
前記ニューラルネットワークは、雑草と作物とを区別するように構成されている、請求項2に記載のシステム。
【請求項4】
前記ニューラルネットワークは、雑草と作物との画像で訓練されている畳み込みニューラルネットワークを備える、請求項2に記載のシステム。
【請求項5】
前記動作は、経過時間にわたって前記システムの運動を追跡することをさらに含む、請求項1に記載のシステム。
【請求項6】
前記運動は、慣性測定ユニット(IMU)、全地球測位システム(GPS)、または内部ナビゲーションシステム(INS)のうちの1つ以上を使用して追跡される、請求項5に記載のシステム。
【請求項7】
前記動作は、前記追跡された運動に基づいて前記予測された標的場所を調節することをさらに含む、請求項5に記載のシステム。
【請求項8】
前記第1のカメラ、前記第2のカメラ、前記光源、前記制御システム、および前記コンピューティングシステムを支持するフレームをさらに備える、請求項1に記載のシステム。
【請求項9】
前記フレームは、前記畑にわたって移動するように構成されている、請求項8に記載のシステム。
【請求項10】
前記フレームは、自律的に移動させられるかまたは運転手によって移動させられるように構成されている、請求項9に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
(関連出願の相互参照)
本願は、その出願が参照することによってその全体として本明細書に組み込まれる2019年9月17日に出願された米国仮出願第62/901,641号の利益を主張する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
農業生産高は、世界中で毎年何兆ドルもの価値がある。農業は、食糧生産の不可欠な構成要素であり、家畜および植物の両方の飼養、栽培を含む。人口の増加および変化する気候に起因する作物収量の減少は、世界的な食糧確保を脅かす。作物収量を改良し、労働効率を高めることによって、農業生産を増加させる方法が、食糧不足を軽減することに役立ち得る。
【発明の概要】
【課題を解決するための手段】
【0003】
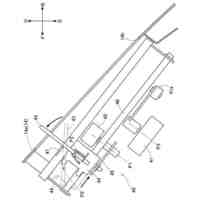
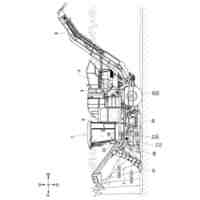
本開示は、植物の自動識別、維持、制御、または標的化のために採用され得る種々の方法、デバイス、モジュール、およびシステムを提供する。例えば、本明細書に開示される方法、デバイス、モジュール、およびシステムは、作物の畑内に位置する雑草を自律的に識別し、根絶させるために使用され得る。方法、デバイス、モジュール、およびシステムは、手動栽培または化学除草剤の代替物として使用され得る。例えば、方法、デバイス、モジュール、およびシステムは、農作物管理のために、または家庭用雑草制御のために使用され得る。
【0004】
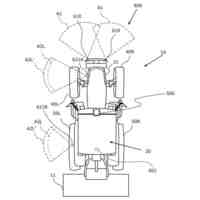
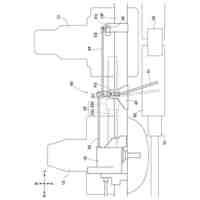
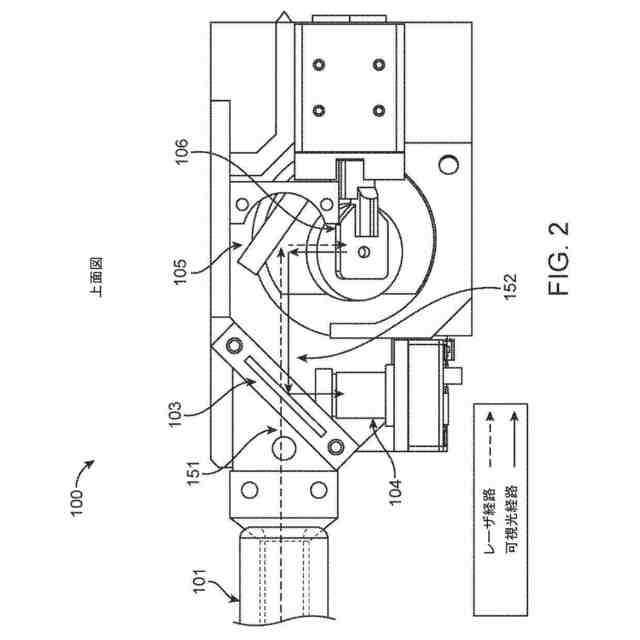
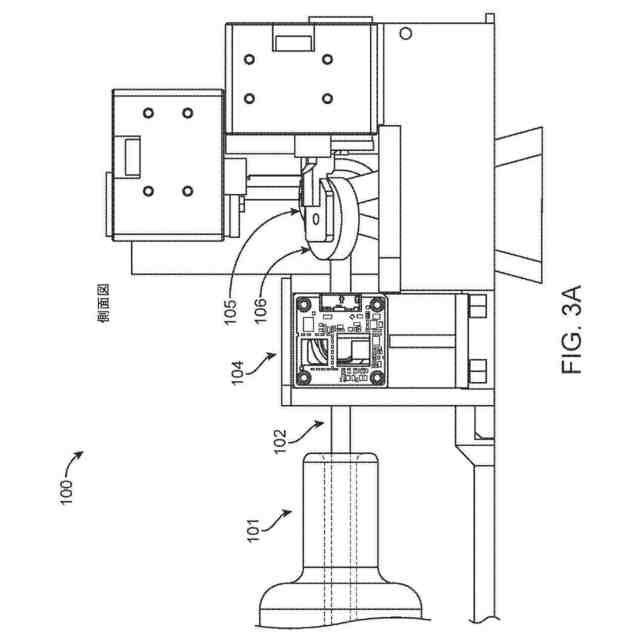
種々の側面では、本開示は、表面上の標的場所に向かって光学経路に沿ってビームを放出するように構成されたエミッタであって、標的場所は、表面上の標的の位置を自律的に特定することによって決定される、エミッタと、光学経路と交差し、ビームを偏向させるように位置付けられた第1の反射要素と、第1の反射要素に接続され、第1の反射要素を回転させ、標的場所に向かってビームを偏向させるように構成された第1の標的化アクチュエータと、エミッタと第1の反射要素との間の光学経路内に位置付けられ、ビームと、ビームと反対の方向に光学経路に沿って進行する標的場所からの散乱光とを異なって偏向させるように構成された合成要素とを備えている光学制御システムを提供する。
【0005】
いくつかの側面では、光学制御システムは、合成要素に光学的に接続され、第1の反射要素から反射される散乱光を受け取り、標的場所を含む標的化視野を撮像するように構成された標的化カメラをさらに備えている。いくつかの側面では、光学制御システムは、光学制御システムが表面に対して移動している間、標的場所に向かってビームを方向付けるように構成される。いくつかの側面では、光学制御システムは、標的場所に対する標的化視野のピクセル移動を検出し、標的化視野のピクセル移動から第1の反射要素の回転に変換するように構成された標的化システムコンピュータをさらに備えている。
【0006】
いくつかの側面では、ピクセル移動から第1の反射要素の回転への変換は、較正機能を参照することを含む。いくつかの側面では、較正機能は、較正表面上の基準マーカの場所をカメラピクセル移動と互いに関係付けることによって取得される。
【0007】
いくつかの側面では、光学制御システムは、光学制御システムに結合された慣性測定ユニットをさらに備え、慣性測定ユニットは、光学制御システムの加速度、表面に対する光学制御システムの回転、またはそれらの組み合わせを測定するように構成される。いくつかの側面では、標的化システムコンピュータは、撮像してからの時間量、光学制御システムの加速度、表面に対する光学制御システムの回転、またはそれらの組み合わせに基づいて、標的場所を調節するように構成される。
【0008】
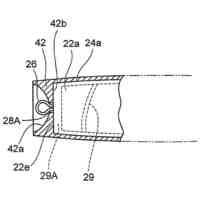
いくつかの側面では、光学制御システムは、エンクロージャ内に封入され、エンクロージャは、放出および可視光を透過させることが可能であり、第1の反射要素と表面との間の光学経路内に位置付けられている脱出窓を備えている。いくつかの側面では、光学制御システムは、エンクロージャ内に完全に封入される。いくつかの側面では、光学制御システムは、空気流を方向付けるように構成された空気源をさらに備えている。いくつかの側面では、エンクロージャは、空気流の方向を制御し、ビームを妨害することなく乱流を低減させるように構成されている、開口の反対側の壁をさらに備えている。
【0009】
いくつかの側面では、第1の反射要素は、ミラーである。いくつかの側面では、合成要素は、ビームを透過させ、可視光を反射する。いくつかの側面では、エミッタは、レーザエミッタである。いくつかの側面では、レーザエミッタは、赤外線レーザ、紫外線レーザ、および可視レーザから成る群から選択される。いくつかの側面では、光学制御システムは、第1の反射要素に接続され、第1の反射要素を回転させ、標的場所に向かってビームを偏向させるように構成された第2の標的化アクチュエータをさらに備えている。いくつかの側面では、光学制御システムは、光学経路と交差し、第1の反射要素によって偏向されるビームを偏向させるように位置付けられた第2の反射要素と、第2の反射要素に接続され、第2の反射要素を回転させ、標的場所に向かってビームを偏向させるように構成された第2の標的化アクチュエータとをさらに備えている。いくつかの側面では、第1の標的化アクチュエータは、第1の軸に沿ってビームを偏向させ、第2の標的化アクチュエータは、第2の軸に沿ってビームを偏向させ、第1の軸および第2の軸は、直交する。いくつかの側面では、ビームの方向に対して、合成要素は、エミッタの後に位置付けられ、第1の反射要素は、合成要素の後に位置付けられ、第2の反射要素は、第1の反射要素の後に位置付けられる。いくつかの側面では、雑草が、標的場所に位置付けられる。
【0010】
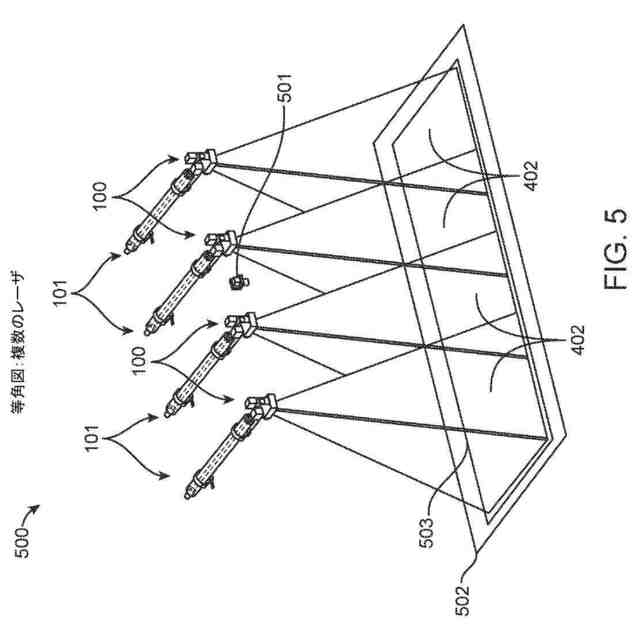
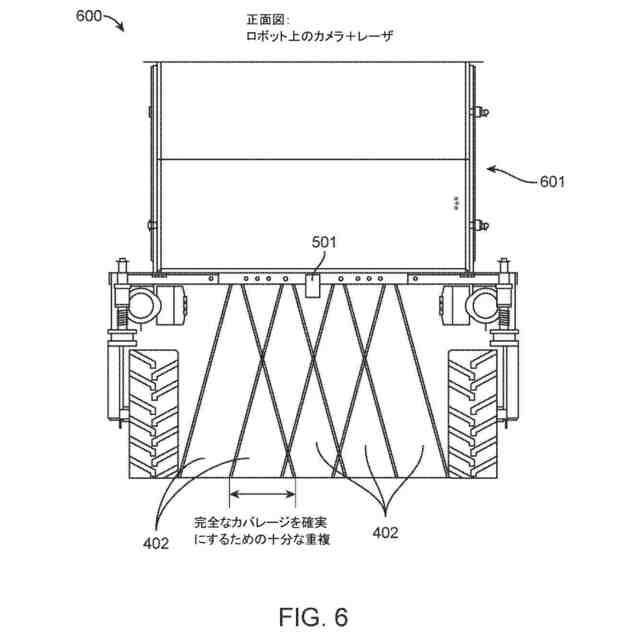
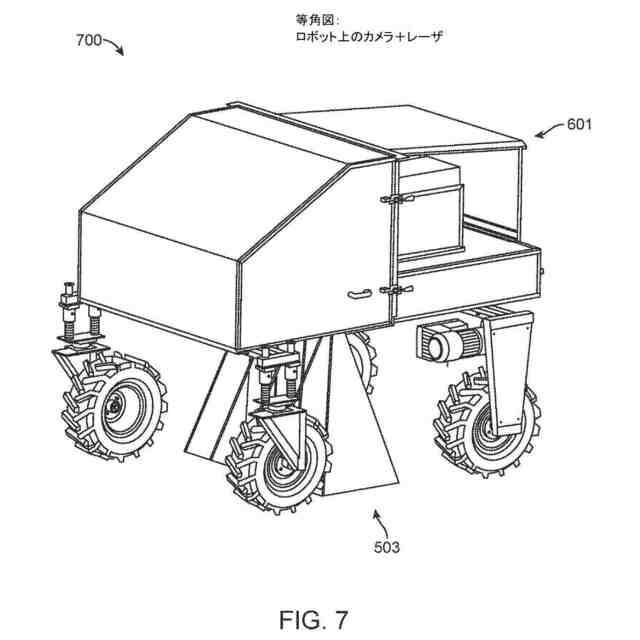
種々の側面では、本開示は、予測カメラを用いて予測視野の画像を捕捉することと、予測視野内の標的の位置を特定することと、標的の場所と重複する標的化視野を有する標的化カメラを備えている複数の標的化モジュールのうちの1つに標的を割り当てることと、標的化カメラを用いて標的化視野の画像を捕捉することと、標的化視野内の標的の位置を特定することと、標的の場所に向かってビーム方向付けることとを含む雑草根絶方法を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釣り用ルアー
14日前
個人
釣り用ルアー
14日前
井関農機株式会社
作業車両
15日前
有限会社マイク
囲い罠
20日前
井関農機株式会社
圃場作業機
16日前
井関農機株式会社
歩行型管理機
14日前
株式会社シマノ
釣竿
15日前
松山株式会社
草刈作業機
13日前
株式会社村岡水産
釣り用ワーム
14日前
株式会社パクマケ
植栽用遮光板
6日前
株式会社泰
愛玩動物用タワー家具
1日前
井関農機株式会社
水田引水管理システム
14日前
花王株式会社
抗菌剤組成物
13日前
鹿島建設株式会社
エビ類育成漁礁
15日前
株式会社クボタ
移植機
16日前
有限会社マドネスジャパン
ポッパー
14日前
株式会社クボタ
移植機
16日前
株式会社クボタ
収穫機
15日前
株式会社クボタ
収穫機
20日前
株式会社クボタ
移植機
15日前
株式会社クボタ
移植機
15日前
株式会社クボタ
移植機
15日前
株式会社クボタ
移植機
15日前
株式会社クボタ
移植機
15日前
株式会社クボタ
移植機
15日前
株式会社クボタ
作業車両
15日前
株式会社クボタ
作業車両
15日前
株式会社クボタ
作業装置
15日前
株式会社クボタ
圃場作業車
14日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
15日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ