TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105282
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223731
出願日
2023-12-28
発明の名称
回転電動機械の偏心量算出装置及び方法並びに回転電動機械の制御装置
出願人
アイダエンジニアリング株式会社
代理人
個人
,
個人
主分類
H02P
21/16 20160101AFI20250703BHJP(電力の発電,変換,配電)
要約
【課題】事前に測定又は解析しておく偏心量算出のためのデータ数が少なく、回転電動機械を駆動するシステムにおいて実施することができ、かつ高精度で偏心量を算出することができる回転電動機械の偏心量算出装置及び方法並びに回転電動機械の制御装置を提供する。
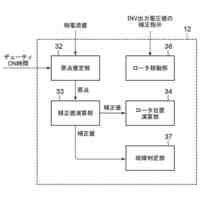
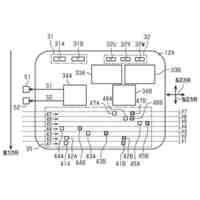
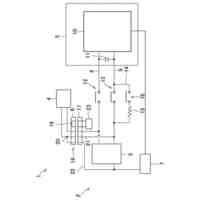
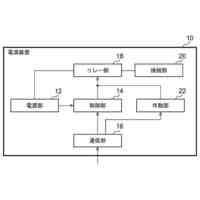
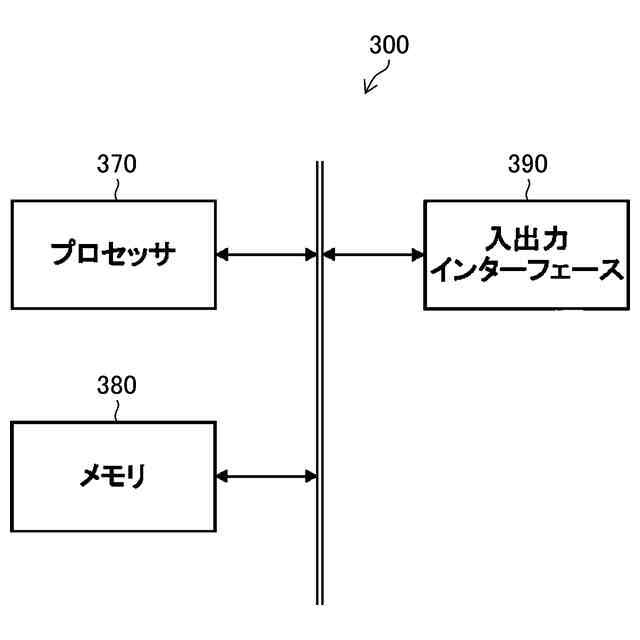
【解決手段】回転電動機械の偏心量算出装置300は、プロセッサ370と、多相の電動機の定数及び偏心量の演算式を記憶するメモリ380とを備え、プロセッサ370は、電動機の各相の巻線への電圧指令又は各相の巻線に印加された電圧と、各相の巻線への電流指令または各相の巻線に流れる電流とを取得し、取得した電圧指令又は電圧と、電流指令または電流と、メモリ380に記憶された電動機の定数及び偏心量の演算式とに基づいて電動機の偏心量を算出する。
【選択図】 図5
特許請求の範囲
【請求項1】
プロセッサと、多相の回転電動機械の定数及び偏心量の演算式を記憶するメモリとを備えた回転電動機械の偏心量算出装置であって、
前記プロセッサは、
前記回転電動機械の各相の巻線への電圧指令又は各相の巻線に印加された電圧と、前記各相の巻線への電流指令または前記各相の巻線に流れる電流とを取得し、
前記取得した前記電圧指令又は前記電圧と、前記電流指令または前記電流と、前記メモリに記憶された前記回転電動機械の定数及び前記偏心量の演算式とに基づいて前記回転電動機械の偏心量を算出する、
回転電動機械の偏心量算出装置。
続きを表示(約 1,700 文字)
【請求項2】
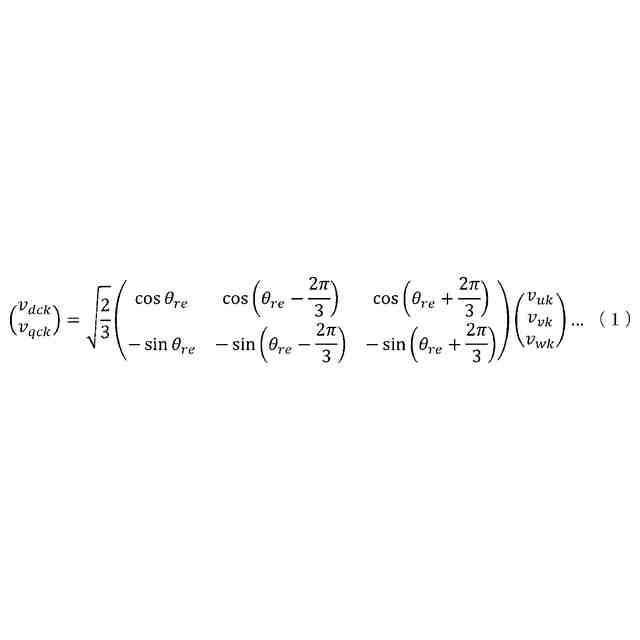
前記プロセッサは、前記取得した前記電圧指令又は前記電圧を、制御上のdc-qc座標の電圧指令又は電圧に座標変換し、前記取得した前記電流指令または前記電流を制御上のdc-qc座標の電流指令または電流に座標変換し、
前記座標変換した前記電圧指令又は前記電圧と、前記座標変換した前記電流指令または前記電流とを前記回転電動機械の偏心量の算出に使用する、
請求項1に記載の回転電動機械の偏心量算出装置。
【請求項3】
前記偏心量の演算式は、前記dc-qc座標とd-q座標とのずれ角である偏心誤差角を算出する第1演算式を含み、
前記プロセッサは、前記第1演算式に前記回転電動機械の定数と、前記座標変換した前記電圧指令又は前記電圧と、前記座標変換した前記電流指令または前記電流とを代入して前記偏心誤差角を算出する、
請求項2に記載の回転電動機械の偏心量算出装置。
【請求項4】
前記メモリに記憶される前記回転電動機械の定数は、前記回転電動機械の相抵抗、d軸インダクタンス、q軸インダクタンス及び極対数のいずれか1以上を含む、
請求項3に記載の回転電動機械の偏心量算出装置。
【請求項5】
前記偏心量の演算式は、前記偏心誤差角と前記偏心量との関係を示す第2演算式を含み、
前記プロセッサは、前記第1演算式により算出した前記偏心誤差角を前記第2演算式に代入して前記偏心量を算出する、
請求項3に記載の回転電動機械の偏心量算出装置。
【請求項6】
前記プロセッサは、
前記第1演算式により前記回転電動機械の多相から構成された巻線の組であって、複数組の巻線毎に、予め設定された運転条件における前記偏心誤差角を算出し、
前記算出した前記複数組の巻線毎の前記偏心誤差角を、未知の定数である仮想回転子半径と、仮想巻線代表位置とを含む前記第2演算式に代入して連立方程式を作成し、
前記連立方程式を満足する前記仮想回転子半径及び前記仮想巻線代表位置を算出し、
前記算出した前記仮想回転子半径及び前記仮想巻線代表位置を、前記運転条件における前記第2演算式の定数にする、
請求項5に記載の回転電動機械の偏心量算出装置。
【請求項7】
前記回転電動機械の多相から構成された巻線の組は、第1巻線と第2巻線の2組である、
請求項1から6のいずれか1項に記載の回転電動機械の偏心量算出装置。
【請求項8】
前記回転電動機械は、電動機又は発電機である、
請求項1から6のいずれか1項に記載の回転電動機械の偏心量算出装置。
【請求項9】
プロセッサと、多相の回転電動機械の定数及び偏心量の演算式を記憶するメモリとを備えた回転電動機械の偏心量算出装置が実行する方法であって、
前記プロセッサが、前記回転電動機械の各相の巻線への電圧指令又は各相の巻線に印加された電圧と、前記各相の巻線への電流指令または前記各相の巻線に流れる電流とを取得するステップと、
前記プロセッサが、前記取得した前記電圧指令又は前記電圧と、前記電流指令または前記電流と、前記メモリに記憶された前記回転電動機械の定数及び前記偏心量の演算式とに基づいて前記回転電動機械の偏心量を算出するステップと、
を含む回転電動機械の偏心量算出方法。
【請求項10】
前記プロセッサが、前記取得した前記電圧指令又は前記電圧を制御上のdc-qc座標の電圧指令又は電圧に座標変換し、前記取得した前記電流指令または前記電流を制御上のdc-qc座標の電流指令または電流に座標変換するステップを含み、
前記回転電動機械の偏心量を算出するステップは、前記座標変換した前記電圧指令又は前記電圧と、前記座標変換した前記電流指令または前記電流とを前記回転電動機械の偏心量の算出に使用する、
請求項9に記載の回転電動機械の偏心量算出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は回転電動機械の偏心量算出装置及び方法並びに回転電動機械の制御装置に係り、特に回転電動機械の制御装置で検出された電圧、電流より偏心量を求める技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
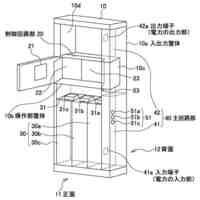
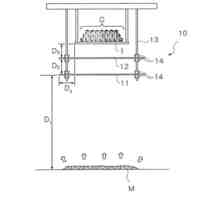
回転電動機械は経年劣化で故障することがある。特にサーボプレス機械の主軸駆動用の回転電動機械である電動機は、プレス機械の振動により軸受け部に過大な負荷がかかることがあり、最悪軸受け部が破損して、電動機の回転子と固定子が接触する事故が起こる虞がある。そのため、回転子と固定子が接触する前に事前に検出できる方法が望まれている。
【0003】
回転子と固定子の接触を事前に検出するには、電動機の回転子かつ/又は固定子の偏心量を求めることが出来ればよい。
【0004】
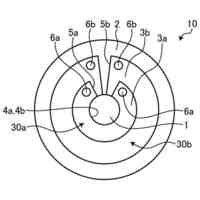
電動機の回転子かつ/又は固定子の偏心量を求める方法の例として、特許文献1には、回転子と周方向に沿って複数の巻線を設けた固定子を備えた回転電機の、前記固定子の少なくとも3つ以上の巻線に電圧を印加した時の各巻線の端子電圧又は巻線電流を測定して回転電機の偏心を推定する回転電機の偏心推定方法であって、回転電機はU,V,Wの3相からなり、それぞれ3個の巻線が直列接続されており、また、例えばU相の3個の巻線は互いに120°間隔に位置しており、これらの3個の巻線の端子電圧を測定することにより、偏心状態がわかり、偏心率が推定できるという方法が開示されている。
【0005】
特許文献1の発明は、電動機のある相を構成する各巻線が空間的に異なる位置に配置されており、電動機が偏心していると、その各巻線の端子電圧が異なる値になることを利用して偏心率(偏心量)を求めるという優れた技術思想である。しかし、ある相の3個の巻線それぞれについて、偏心率(偏心量)と電圧の関係を求めておく必要があるが、このデータ数が多くなる欠点がある。例えば、x方向+側3点、-側3点、y 方向+側3点、-側3点の電圧、電流データを測定する場合、合計12点の測定が必要であり、事前に用意するデータ測定、又は解析に手間がかかる。精度を上げようとすればより多くの点数が必要になるのは言うまでもない。また、ある一つの電圧電流条件だけ偏心率(偏心量)を求めればよいのであれば、そのような手間をかけることも可能かもしれないが、様々な電圧、電流条件における偏心量を求めるのは多大な手間がかかる。
【0006】
さらに、特許文献1の発明は、組み立て時における電動機の偏心量測定を目的としており、電動機販売後の客先において、経年劣化した電動機の偏心量を容易に測定可能となる装置構成は開示されておらず、また示唆もない。仮に特許文献1の方法を用いて客先で測定するには、客先の装置に据え付けられた電動機を取り外し、別に持参した偏心測定ユニットと外部駆動の電動機を、取り外した電動機に接続して測定する方法が考えられるが、偏心量の測定に多大な手間とコストがかかるのは想像に難くない。
【0007】
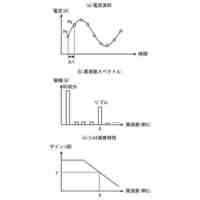
電動機の偏心量を求める方法の別の例として、特許文献2の発明は、回転機と、回転機と接続した電力変換装置とを有する回転機システムであって、相電流を計測する電流計測部と、相電流に三相二相変換を実行して電流ベクトルを算出する電流ベクトル算出部と、電流ベクトルに基づいて分析対象量を算出する分析対象量算出部と、分析対象量に基づいて、特定周波数範囲の波形を抽出する特徴量波形抽出部と、抽出した波形に基づいて異常度を算出する異常度算出部とを有する回転機システムが開示されている。
【0008】
特許文献2の発明は回転機と接続した電力変換装置とを有する回転機システムで異常度(偏心等)を検出できるので、前述の特許文献1の方法では困難だった電動機販売後の客先での測定が、特許文献1の方法に比べれば実現しやすいと考えられる。しかし、特許文献2の方法は偏心を検出できるものの、高精度に具体的な偏心量を推定する方法は開示されていない。高精度に具体的な偏心量を推定できなければ、精度の低い異常判定にならざるを得ない。
【先行技術文献】
【特許文献】
【0009】
特開2011-229226号公報
特開2020-114084号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本開示の技術に係る一つの実施形態は、回転電動機械の電圧、電流を測定して偏心量を推定する際に、事前に測定又は解析しておく偏心量算出のためのデータ数が少なく、回転電動機械を駆動するシステムにおいて実施することができ、かつ高精度で偏心量を算出することができる回転電動機械の偏心量算出装置及び方法並びに回転電動機械の制御装置を提供する。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
恒久電源開発の装置
21日前
個人
ステッピングモータ実習装置
今日
キヤノン株式会社
電源装置
14日前
株式会社竹中工務店
避雷設備
14日前
トヨタ自動車株式会社
充電方法
7日前
ダイハツ工業株式会社
溶接装置
21日前
愛知電機株式会社
ステータおよびモータ
21日前
愛知電機株式会社
ステータおよびモータ
21日前
愛知電機株式会社
ステータおよびモータ
21日前
サンデン株式会社
モータ制御装置
21日前
株式会社エスイー
上載物の支持装置
14日前
因幡電機産業株式会社
充電システム
21日前
新電元工業株式会社
充電装置
7日前
AGC株式会社
太陽電池モジュール
14日前
三菱電機株式会社
回転子および電動機
14日前
ダイハツ工業株式会社
絶縁紙成型装置
17日前
住友金属鉱山株式会社
遮熱装置
8日前
住友重機械工業株式会社
回転電機
17日前
多摩川精機株式会社
逆起電圧可変モータ
16日前
株式会社ゲットクリーンエナジー
発電機
14日前
ミネベアミツミ株式会社
回転機器
今日
ミネベアミツミ株式会社
回転機器
今日
日産自動車株式会社
光電変換装置
14日前
ミネベアミツミ株式会社
回転機器
今日
ミネベアミツミ株式会社
回転機器
今日
株式会社ジェイテクト
モータ装置
10日前
株式会社IJTT
オイル冷却装置
21日前
株式会社日立製作所
回転電機
今日
スズキ株式会社
車両用モータ構造
21日前
ヤマハ発動機株式会社
電力変換装置
16日前
ヤマハ発動機株式会社
電力変換装置
16日前
トヨタ自動車株式会社
積層鋼板の製造方法
21日前
トヨタ自動車株式会社
積層鋼板の製造方法
16日前
トヨタ自動車株式会社
充電システム
10日前
トヨタ自動車株式会社
電源装置
21日前
大和化成工業株式会社
結束部材
7日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ