TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025104921
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223105
出願日
2023-12-28
発明の名称
飛行制御装置、飛行制御方法、及び無人航空機
出願人
楽天グループ株式会社
代理人
弁理士法人インテクト国際特許事務所
,
個人
,
個人
主分類
G01C
21/26 20060101AFI20250703BHJP(測定;試験)
要約
【課題】遮蔽物の多い場所であっても安全に無人航空機の飛行制御を行うことが可能な飛行制御装置、飛行制御方法、及び無人航空機を提供する。
【解決手段】UAV1は、飛行中に捕捉した測位衛星からの電波の情報に基づいて、当該測位衛星に関する情報として測位精度の指標となるパラメータ値を連続的に取得し、取得されたパラメータ値が測位精度の低下を示す状況に該当する場合に、当該UAV1の周辺において電波の受信を妨げる遮蔽物を特定し、当該特定された遮蔽物から離れるように飛行制御する。
【選択図】図11
特許請求の範囲
【請求項1】
飛行中の無人航空機により捕捉された測位衛星からの電波の情報に基づいて、前記測位衛星に関する情報として測位精度の指標となるパラメータ値を連続的に取得する取得部と、
前記パラメータ値が前記測位精度の低下を示す状況に該当する場合に、前記飛行中の無人航空機の周辺において前記電波の受信を妨げる遮蔽物を特定する特定部と、
前記特定された遮蔽物から離れるように当該無人航空機の飛行制御を行う飛行制御部と、
を備えることを特徴とする飛行制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記特定部は、前記飛行中の無人航空機の周辺に存在する地物の高さに基づいて前記遮蔽物を特定することを特徴とする請求項1に記載の飛行制御装置。
【請求項3】
前記特定部は、前記飛行中の無人航空機の周辺の地図データから前記地物の高さを特定し、当該特定した地物の高さに基づいて前記遮蔽物を特定することを特徴とする請求項2に記載の飛行制御装置。
【請求項4】
前記取得部は、前記パラメータ値として、前記測位衛星の捕捉数を連続的に取得し、
前記特定部は、前記連続的に取得される前記捕捉数と第1閾値とを連続的に比較し、当該捕捉数が当該第1閾値未満になった場合に、前記測位精度の低下を示す状況に該当するとして、前記無人航空機の周辺において前記電波の受信を妨げる遮蔽物を特定することを特徴とする請求項1に記載の飛行制御装置。
【請求項5】
前記取得部は、前記パラメータ値として、前記測位精度の低下率を連続的に取得し、
前記特定部は、前記連続的に取得される前記低下率と第2閾値とを連続的に比較し、当該低下率が当該第2閾値より大きくなった場合に、前記測位精度の低下を示す状況に該当するとして、前記無人航空機の周辺において前記電波の受信を妨げる遮蔽物を特定することを特徴とする請求項1に記載の飛行制御装置。
【請求項6】
前記飛行制御部は、前記遮蔽物の高さから前記無人航空機の高度を引いた値が0以上且つ第3閾値以下である場合に、前記無人航空機が垂直方向に上昇するように当該無人航空機の飛行制御を行うことを特徴とする請求項1乃至5の何れか一項に記載の飛行制御装置。
【請求項7】
前記飛行制御部は、前記遮蔽物の高さから前記無人航空機の高度を引いた値が0以上且つ第3閾値より大きい場合に、前記無人航空機が上昇しながら前記遮蔽物から水平方向に離れるように当該無人航空機の飛行制御を行うことを特徴とする請求項1に記載の飛行制御装置。
【請求項8】
前記飛行制御部は、前記遮蔽物の高さが第3閾値以下である場合に、前記無人航空機が垂直方向に上昇するように当該無人航空機の飛行制御を行うことを特徴とする請求項1乃至5の何れか一項に記載の飛行制御装置。
【請求項9】
前記飛行制御部は、前記遮蔽物の高さが第3閾値より大きい場合に、前記無人航空機が上昇しながら前記遮蔽物から水平方向に離れるように当該無人航空機の飛行制御を行うことを特徴とする請求項1に記載の飛行制御装置。
【請求項10】
前記飛行制御部は、前記遮蔽物から離れる方向に別の遮蔽物が存在すると判定した場合に、前記無人航空機が前記別の遮蔽物に衝突しない上昇角度を算出し、当該算出された上昇角度で上昇するように当該無人航空機の飛行制御を行うことを特徴とする請求項7または9に記載の飛行制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、測位衛星からの電波を受信して自律飛行する無人航空機の技術分野に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、ドローンなどの無人航空機においては、衛星測位システムを活用した自律飛行が主流となっており、測位衛星を捕捉できない環境でどのように自律飛行が課題となっている。例えば特許文献1には、予定航路を飛行すると測位精度が低下してしまう場合でも、予定航路とは異なる航路で無人航空機を飛行させることにより、測位精度の低下を回避し、位置を測位しながら無人航空機の飛行を継続することが可能な技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-147467号公報
【発明の概要】
【0004】
ところで、測位衛星からの電波の受信を妨げる遮蔽物が多い場所、特に、将来、ドローン配送の活用が期待される都市部では、建物(例えば、高層ビル)が乱立していることが予想されるため、測位衛星の捕捉数が低下することによって測位精度が低下し、機体の安全性の低下や配送などへの影響が懸念される。また、地球の周りを移動する測位衛星の配置状態が変わることによっても測位精度が低下し、機体の安全性や配送などへの影響が懸念される。
【0005】
そこで、本発明は、遮蔽物の多い場所であっても安全に無人航空機の飛行制御を行うことが可能な飛行制御装置、飛行制御方法、及び無人航空機を提供することを課題の一例とする。
【課題を解決するための手段】
【0006】
(適用例1)上記課題を解決するために、本適用例に係る飛行制御装置は、飛行中の無人航空機により捕捉された測位衛星からの電波の情報に基づいて、前記測位衛星に関する情報として測位精度の指標となるパラメータ値を連続的に取得する取得部と、前記パラメータ値が前記測位精度の低下を示す状況に該当する場合に、前記飛行中の無人航空機の周辺において前記電波の受信を妨げる遮蔽物を特定する特定部と、前記特定された遮蔽物から離れるように当該無人航空機の飛行制御を行う飛行制御部と、を備えることを特徴とする。
【0007】
(適用例2)本適用例に係る飛行制御方法は、コンピュータにより実行される飛行制御方法であって、飛行中の無人航空機により捕捉された測位衛星からの電波の情報に基づいて、前記測位衛星に関する情報として測位精度の指標となるパラメータ値を連続的に取得するステップと、前記パラメータ値が前記測位精度の低下を示す状況に該当する場合に、前記飛行中の無人航空機の周辺において前記電波の受信を妨げる遮蔽物を特定するステップと、前記特定された遮蔽物から離れるように当該無人航空機の飛行制御を行うステップと、を含むことを特徴とする。
【0008】
(適用例3)本適用例に係る無人航空機は、自律飛行可能な無人航空機であって、飛行中に捕捉した測位衛星からの電波の情報に基づいて、前記測位衛星に関する情報として測位精度の指標となるパラメータ値を連続的に取得する取得部と、前記パラメータ値が前記測位精度の低下を示す状況に該当する場合に、前記飛行中の無人航空機の周辺において前記電波の受信を妨げる遮蔽物を特定する特定部と、前記特定された遮蔽物から前記無人航空機が離れるように飛行制御を行う飛行制御部と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明によれば、遮蔽物の多い場所であっても安全に無人航空機の飛行制御を行うことができる。
【図面の簡単な説明】
【0010】
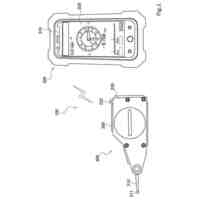
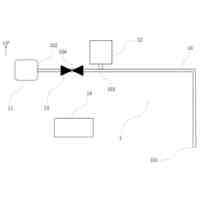
飛行制御システムSの概要構成例を示す図である。
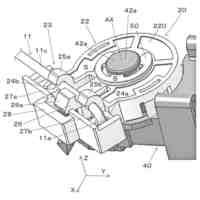
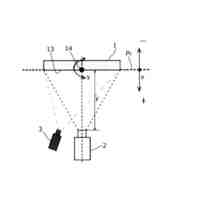
UAV1の概要構成例を示す図である。
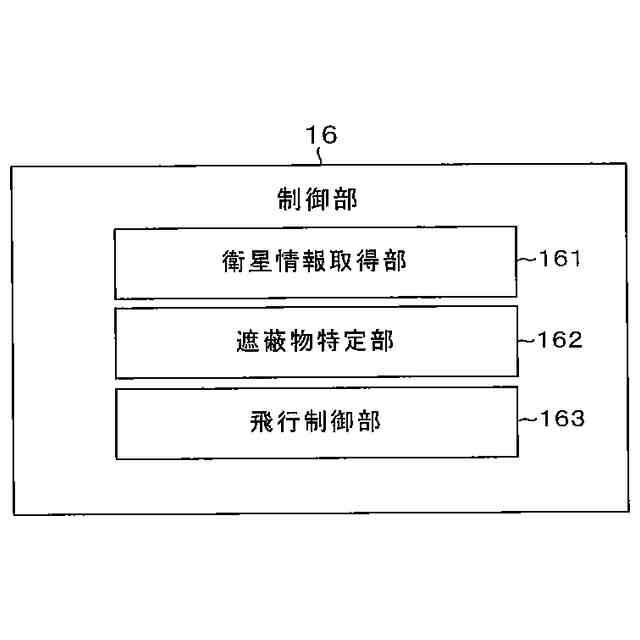
制御部16における機能ブロック例を示す図である。
UAV1が垂直方向(θ=90度)に上昇する様子を示す概念図である。
UAV1が斜め上方向(0度<θ<90度)に上昇する様子を示す概念図である。
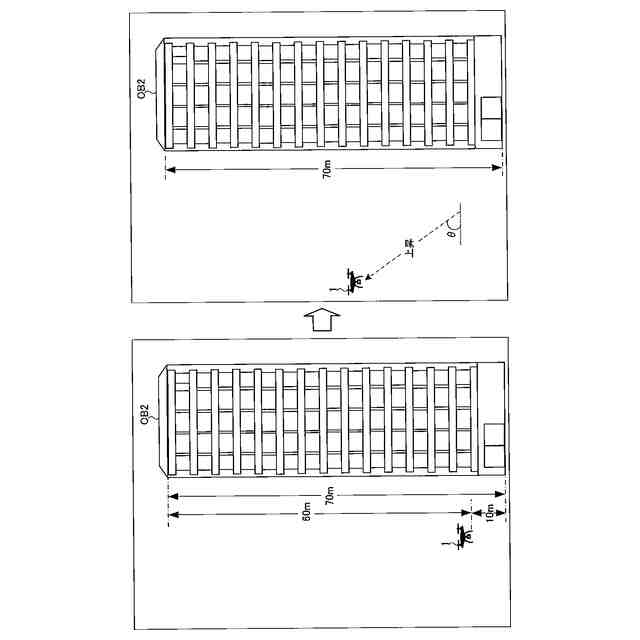
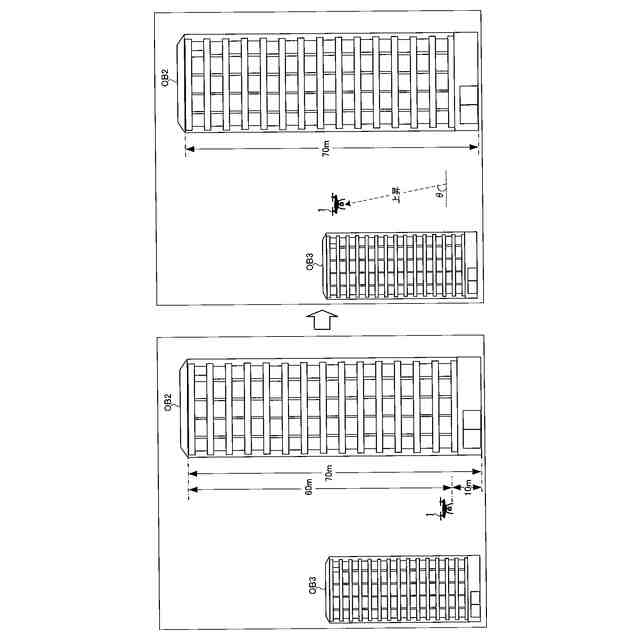
遮蔽物OB1の反対側にある別の遮蔽物OB2に衝突しない上昇角度でUAV1が上昇する様子を示す概念図である。
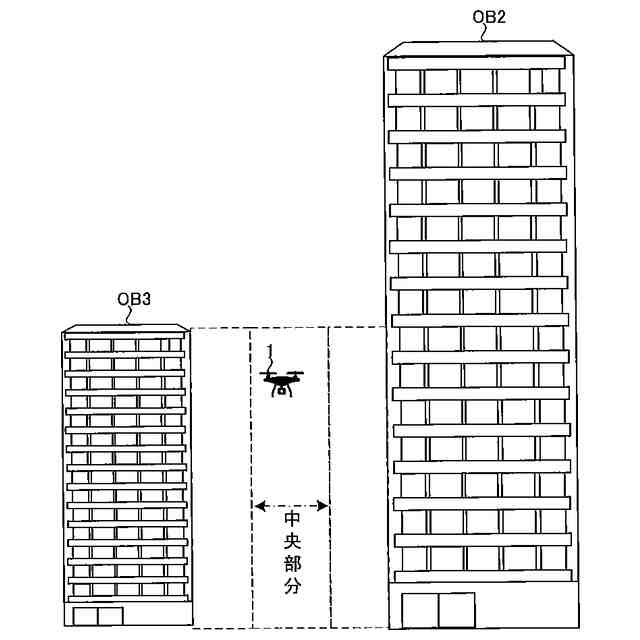
遮蔽物OB2と遮蔽物OB3との間の中央部分の一例を示す概念図である。
測位精度の低下が回復した後にUAV1がウェイポイントWP3まで徐々に下降する様子を示す概念図である。
UAV1が測位精度の低下が回復することが予想されるウェイポイントWP3に向けて飛行する様子を示す概念図である。
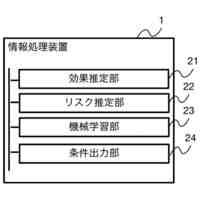
飛行管理サーバ2の概要構成例を示す図である。
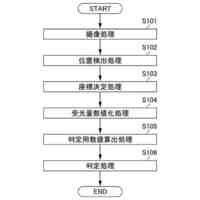
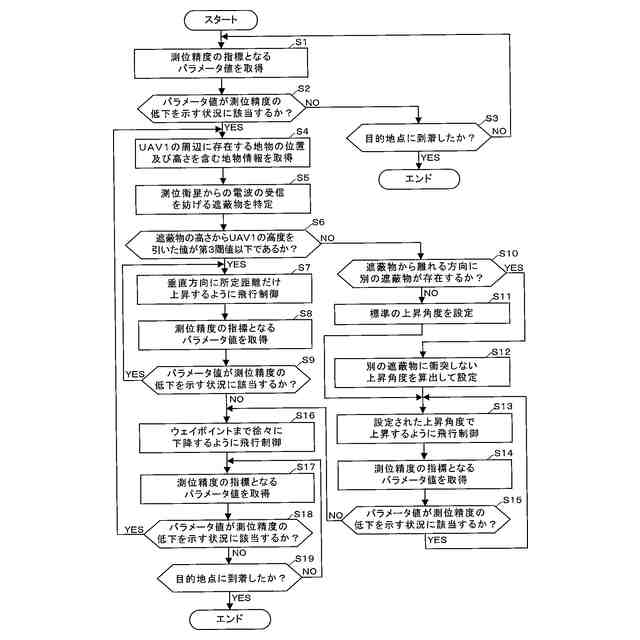
実施例1において飛行管理サーバ2の制御部23により実行される飛行制御処理の一例を示すフローチャートである。
実施例2において飛行管理サーバ2の制御部23により実行される飛行制御処理の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
楽天グループ株式会社
情報処理装置、方法及びプログラム
9日前
日本精機株式会社
計器装置
1か月前
株式会社東光高岳
計器
27日前
株式会社ミツトヨ
測定器
24日前
株式会社豊田自動織機
産業車両
2日前
日本精機株式会社
液面検出装置
1か月前
大和製衡株式会社
組合せ秤
1か月前
大和製衡株式会社
組合せ秤
1か月前
株式会社国際電気
試験装置
9日前
大和製衡株式会社
組合せ秤
1か月前
個人
フロートレス液面センサー
1か月前
大同特殊鋼株式会社
疵検出方法
24日前
ダイハツ工業株式会社
試験用治具
1か月前
株式会社田中設備
報知装置
3日前
日本特殊陶業株式会社
ガスセンサ
25日前
日本特殊陶業株式会社
ガスセンサ
25日前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社CAST
センサ固定治具
2日前
日本特殊陶業株式会社
ガスセンサ
1か月前
エグゼヴィータ株式会社
端末装置
25日前
オムロン株式会社
スイッチング装置
9日前
富士電機株式会社
エンコーダ
26日前
富士電機株式会社
エンコーダ
26日前
日本装置開発株式会社
X線検査装置
12日前
柳井電機工業株式会社
部材検査装置
25日前
株式会社クボタ
作業車
1か月前
バイオテック株式会社
容器設置装置
25日前
株式会社熊平製作所
刃物類判別装置
2日前
WOTA株式会社
液位検出システム
9日前
タカノ株式会社
試料分析装置
24日前
タカノ株式会社
試料分析装置
24日前
トヨタ自動車株式会社
歯車の検査方法
1か月前
TDK株式会社
計測装置
1か月前
旭光電機株式会社
漏出検出装置
1か月前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ