TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025104197
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2024069789
出願日
2024-04-23
発明の名称
モビリティ用カメラベースの同時的位置推定および地図作成方法およびシステム
出願人
現代自動車株式会社
,
HYUNDAI MOTOR COMPANY
,
起亞株式会社
,
KIA CORPORATION
代理人
弁理士法人共生国際特許事務所
主分類
G05D
1/246 20240101AFI20250702BHJP(制御;調整)
要約
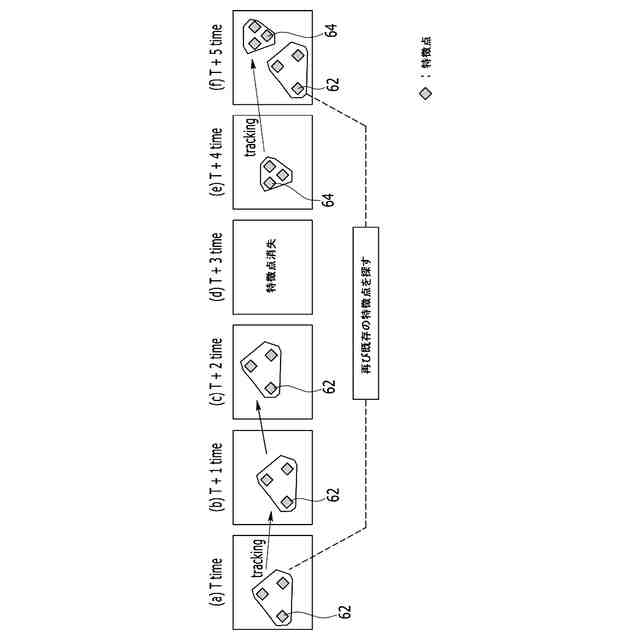
【課題】特徴点を消失しても、継続して進行できるモビリティ用同時的位置推定および地図作成(SLAM)システムを開示する。
【解決手段】本発明は、モビリティの前方イメージを取得するように構成されたカメラと、モビリティの移動データを検出するように構成された移動データセンサと、カメラからモビリティの前方イメージを受信して前方イメージから特徴点を探索し、移動データセンサからモビリティの移動データを受信し、探索された特徴点を追従し、特徴点を追従する状態を格納するように構成された制御器とを含み、前記状態は、前に追従していた第1特徴点を正常に追従していることを示す第1状態と、第1特徴点を消失した後、新たな第2特徴点を追従していることを示す第2状態と、第1特徴点および第2特徴点が消失したことを示す第3状態とを含む。
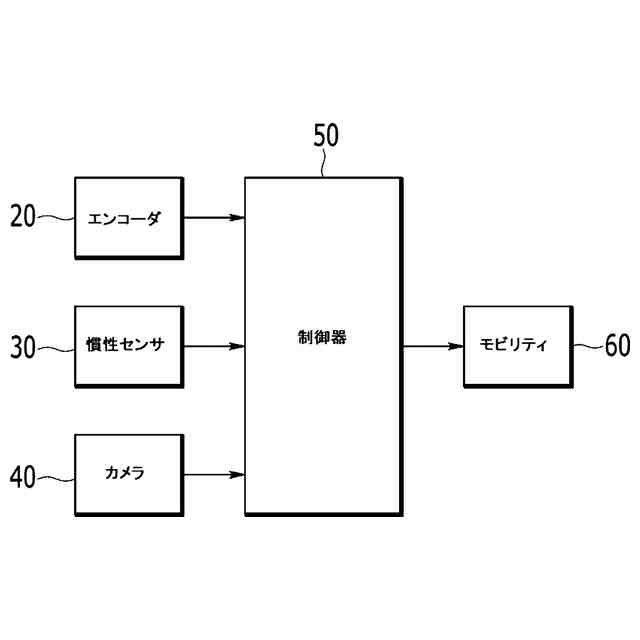
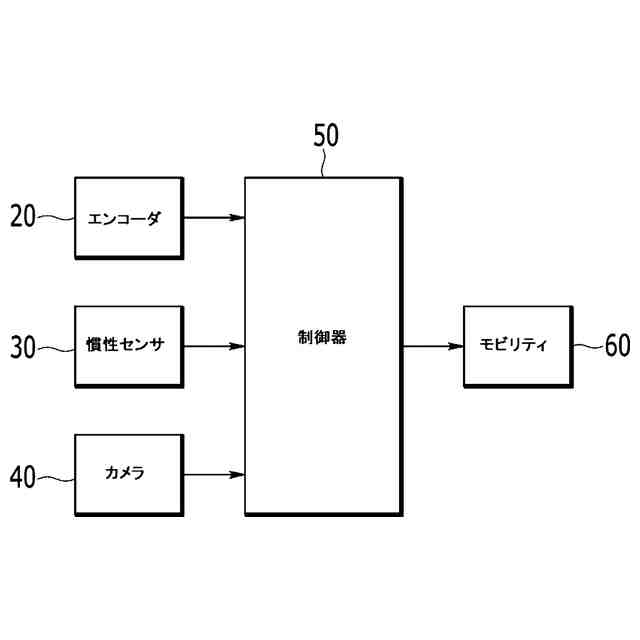
【選択図】 図1
特許請求の範囲
【請求項1】
モビリティの前方イメージを取得するように構成されたカメラと、
モビリティの移動データを検出するように構成された移動データセンサと、
カメラからモビリティの前方イメージを受信して前方イメージから特徴点を探索し、移動データセンサからモビリティの移動データを受信し、探索された特徴点を追従し、特徴点を追従する状態を格納するように構成された制御器と、
を含み、
前記状態は、
前に追従していた第1特徴点を正常に追従していることを示す第1状態と、
第1特徴点を消失した後、新たな第2特徴点を追従していることを示す第2状態と、
第1特徴点および第2特徴点が消失したことを示す第3状態と、
を含むことを特徴とするモビリティ用同時的位置推定および地図作成(SLAM)システム。
続きを表示(約 1,900 文字)
【請求項2】
前記制御器は、第3状態でモビリティの移動データに基づいてモビリティの位置をアップデートするようにさらに構成されたことを特徴とする請求項1に記載のモビリティ用SLAMシステム。
【請求項3】
前記移動データセンサは、
モビリティに備えられた駆動モータまたは車輪の回転に関する情報を測定し、前記情報を制御器に伝送するように構成されたエンコーダ、または
モビリティの速度と方向、重力、そして加速度を含むモビリティの移動状況に関する情報を測定し、前記情報を制御器に伝送するように構成された慣性センサ、
を含むことを特徴とする請求項1に記載のモビリティ用SLAMシステム。
【請求項4】
前記制御器は、
第1状態で第1特徴点を追従し、第1特徴点が含まれているフレームを第1キーフレームとして格納し、
第1状態の後、第2状態で第2特徴点を臨時に追従し、第2特徴点が含まれているフレームを第2キーフレームとして格納し、
第1、第2キーフレーム間の距離が設定距離未満なのかを判断し、
第1、第2キーフレーム間の距離が設定距離未満という判断に応答して、状態を第1状態に入力し、現在のフレームを第1キーフレームとして格納するようにさらに構成されたことを特徴とする請求項1に記載のモビリティ用SLAMシステム。
【請求項5】
前記制御器は、第1、第2キーフレーム間の距離が設定距離以上という判断に応答して、第2状態に維持された時間が設定時間より大きいかを判断し、
第2状態に維持された時間が設定時間より大きいという判断に応答して、状態を第1状態に入力し、第2特徴点を新たな第1特徴点と見なして追従するようにさらに構成されたことを特徴とする請求項4に記載のモビリティ用SLAMシステム。
【請求項6】
前記制御器は、第2状態に維持された時間が設定時間未満という判断に応答して、状態を第2状態に入力し、第2特徴点を臨時に追従するようにさらに構成されたことを特徴とする請求項5に記載のモビリティ用SLAMシステム。
【請求項7】
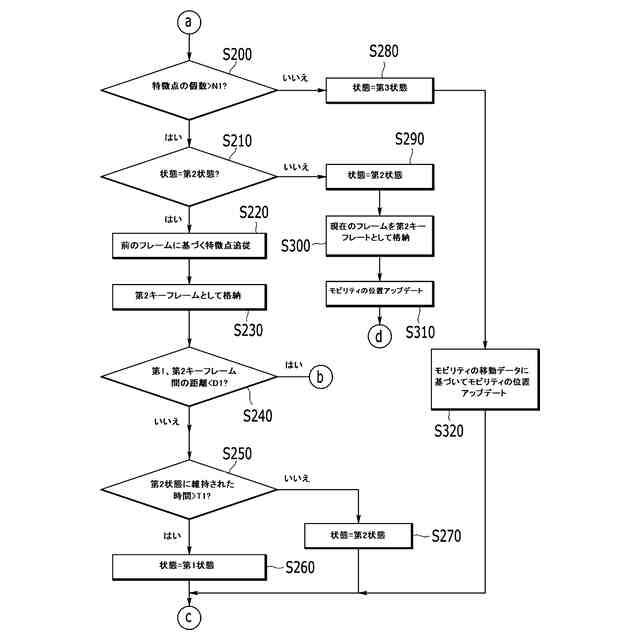
前記制御器は、追従していた第1特徴点を消失し、新たな第2特徴点を探索したことに応答して、状態を第2状態に入力し、第2特徴点が含まれているフレームを第2キーフレームとして格納し、第2キーフレームに基づいてモビリティの位置をアップデートするようにさらに構成されたことを特徴とする請求項1に記載のモビリティ用SLAMシステム。
【請求項8】
前記制御器は、探索された特徴点の個数が設定個数以下の場合、状態を第3状態に入力するようにさらに構成されたことを特徴とする請求項1に記載のモビリティ用SLAMシステム。
【請求項9】
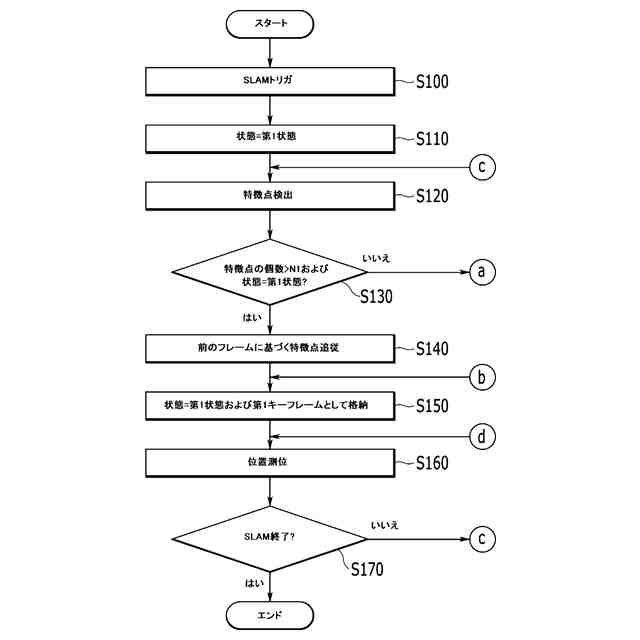
前に追従していた第1特徴点を正常に追従していることを示す第1状態、第1特徴点を消失した後、新たな第2特徴点を追従していることを示す第2状態、そして第1特徴点および第2特徴点が消失したことを示す第3状態、のうちの1つの状態で特徴点またはモビリティの移動データに基づくモビリティの位置を測位するモビリティ用同時的位置推定および地図作成(SLAM)方法において、
制御器によって、第1状態でモビリティの前方イメージをカメラから受信して前方イメージから特徴点を探索する段階と、
制御器によって、設定された個数より多い特徴点が探索されたという判断に応答して、現在探索された第1特徴点を含むフレームを第1キーフレームとして格納し、第1特徴点に基づいてモビリティの位置を測位する段階と、
制御器によって、設定された個数以下の特徴点が探索されたという判断に応答して、状態に第3状態を入力する段階と、
制御器によって、モビリティの移動データに基づいてモビリティの位置を測位する段階と、
を含むことを特徴とするモビリティ用SLAM方法。
【請求項10】
前記制御器によって、第3状態でモビリティの前方イメージをカメラから受信して前方イメージから特徴点を探索する段階と、
前記制御器によって、設定された個数より多い特徴点が探索されたという判断に応答して、状態に第2状態を入力する段階と、
前記制御器によって、現在探索された第2特徴点に基づいてモビリティの位置を測位する段階と、
をさらに含むことを特徴とする請求項9に記載のモビリティ用SLAM方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モビリティ用カメラベースの同時的位置推定および地図作成方法およびシステムに関し、より詳しくは、オブジェクト追従による同時的位置推定および地図作成(Simultaneous Localization And Mapping、SLAM)の途中に特徴点を消失しても、移動データセンサに基づく位置測位でSLAMを継続して進行するモビリティ用カメラベースの同時的位置推定および地図作成方法およびシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
同時的位置推定および地図作成(Simultaneous Localization And Mapping、SLAM)は、モビリティが未知の環境を探索しながら現在の自身の位置を計測し、同時に周辺環境の地図を作成する技術をいう。このようなSLAMは、主にライダーベースで行われる。しかし、ライダーベースのSLAMは、モビリティにライダーを別途に装着しなければならないので価格が高く、人間の輸送ではなく室内でのみ使用するモビリティには適用されることが珍しく、カメラベースのSLAMが主に適用されていた。
【0003】
しかし、カメラベースの室内環境SLAMは、白い壁、特徴がない平面、光が強い場合の外乱によってカメラが検出したイメージから特徴点を正確に抽出しにくいことがあり、特徴点を長時間消失する場合、SLAMが終了しうる。この背景技術の部分に記載された事項は発明の背景に対する理解を増すために作成されたものであって、この技術の属する分野における通常の知識を有する者にすでに知られた従来技術でない事項を含むことができる。
【先行技術文献】
【特許文献】
【0004】
特開2020-135579号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、オブジェクト追従による同時的位置推定および地図作成(Simultaneous Localization And Mapping、SLAM)の途中に特徴点を消失しても、移動データセンサに基づく位置測位でSLAMを継続して進行するモビリティ用カメラベースの同時的位置推定および地図作成方法およびシステムを提供することにある。
【課題を解決するための手段】
【0006】
本発明によるモビリティ用同時的位置推定および地図作成(SLAM)システムは、モビリティの前方イメージを取得するように構成されたカメラと、モビリティの移動データを検出するように構成された移動データセンサと、カメラからモビリティの前方イメージを受信して前方イメージから特徴点を探索し、移動データセンサからモビリティの移動データを受信し、探索された特徴点を追従し、特徴点を追従する状態を格納するように構成された制御器とを含み、前記状態は、前に追従していた第1特徴点を正常に追従していることを示す第1状態と、第1特徴点を消失した後、新たな第2特徴点を追従していることを示す第2状態と、第1特徴点および第2特徴点が消失したことを示す第3状態とを含むことを特徴とする。
【0007】
前記制御器は、第3状態でモビリティの移動データに基づいてモビリティの位置をアップデートするようにさらに構成される。
【0008】
移動データセンサは、モビリティに備えられた駆動モータまたは車輪の回転に関する情報を測定し、前記情報を制御器に伝送するように構成されたエンコーダ、またはモビリティの速度と方向、重力、そして加速度を含むモビリティの移動状況に関する情報を測定し、前記情報を制御器に伝送するように構成された慣性センサを含むことができる。
【0009】
制御器は、第1状態で第1特徴点を追従し、第1特徴点が含まれているフレームを第1キーフレームとして格納し、第1状態の後、第2状態で第2特徴点を臨時に追従し、第2特徴点が含まれているフレームを第2キーフレームとして格納し、第1、第2キーフレーム間の距離が設定距離未満なのかを判断し、第1、第2キーフレーム間の距離が設定距離未満という判断に応答して、状態を第1状態に入力し、現在のフレームを第1キーフレームとして格納するようにさらに構成される。
【0010】
前記制御器は、第1、第2キーフレーム間の距離が設定距離以上という判断に応答して、第2状態に維持された時間が設定時間より大きいかを判断し、第2状態に維持された時間が設定時間より大きいという判断に応答して、状態を第1状態に入力し、第2特徴点を新たな第1特徴点と見なして追従するようにさらに構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
生産早送り装置
今日
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
25日前
個人
作業車両自動化システム
6日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
14日前
株式会社ダイフク
搬送設備
4日前
トヨタ自動車株式会社
移動制御システム
今日
トヨタ自動車株式会社
ペダル機構
2か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
11日前
株式会社鷺宮製作所
制御装置
1か月前
三菱電機株式会社
自己位置推定装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
減圧弁
8日前
株式会社オプトン
制御プログラム生成装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
18日前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
アズビル株式会社
制御システムおよび制御方法
14日前
アズビル株式会社
制御システムおよび制御方法
14日前
株式会社戸張空調
アクセル・ブレーキ操作装置
2か月前
株式会社テイエルブイ
減圧弁の制御装置
20日前
キヤノン電子株式会社
加工システム、及び、加工装置
今日
キヤノン電子株式会社
加工システム、及び、加工装置
今日
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
WHILL株式会社
電動モビリティ
3か月前
オムロン株式会社
安全装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ