TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102782
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2025034611,2023529480
出願日
2025-03-05,2022-02-09
発明の名称
外界認識システム
出願人
Astemo株式会社
代理人
弁理士法人平木国際特許事務所
主分類
G08G
1/00 20060101AFI20250701BHJP(信号)
要約
【課題】車両前方の路面凹凸を高精度に検知することができる外界認識システムを得る。
【解決手段】本発明の外界認識システムは、自車両が走行する路面の3次元形状を認識する外界認識システムであって、自車両は、車載カメラで撮像した撮像画像から路面上構造物を検出する画像処理を行う画像処理部と、外部サーバから路面上構造物の位置情報を受信する車両通信部と、車両通信部により受信した路面上構造物の位置情報に基づいて画像処理部の画像処理方法を変更する画像処理方法決定部と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
外部サーバに通信接続されて情報を送信する少なくとも1台以上の情報提供車両を備える外界認識システムであって、
該情報提供車両は、
走行路面の3次元形状を計測して路面上構造物を検知する路面上構造物検知部を有し、
前記情報提供車両は、鉛直方向の車両振動を検出する車両振動検出部と、前記路面上構造物検知部としてステレオカメラを備え、
該ステレオカメラは、前記車両振動検出部により閾値以上の車両振動を検知した場合に、前記車両振動を検知した振動検知地点が撮像されている撮像画像を抽出し、前記振動検知地点が撮像されている撮像画像を前記外部サーバに送信し、
前記外部サーバは、自車両から取得した前記振動検知地点が撮像されている撮像画像から前記路面上構造物を検知する画像処理を行う、ことを特徴とする外界認識システム。
続きを表示(約 90 文字)
【請求項2】
請求項1に記載の外界認識システムにおいて、
前記外部サーバで行われる画像処理は、前記情報提供車両で行われる画像処理よりも高精度な処理である。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両が走行する路面の凹凸を認識する外界認識システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から車載カメラにより車両前方を撮像してスピードバンプなどの路面上の構造物を認識する外界認識技術が存在する。そして、他車両が走行して取得した外界認識情報を、自車両の走行制御に利用するシステムが提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2010-287044号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車載カメラ等の外界認識センサによって検知を行う場合に、夜間、逆光、雨天などの環境状況によっては路面上構造物などの路面の凹凸を正確に認識できないことがある。また、他車両により取得した外界認識情報を自車両の走行制御に利用する場合、路面上構造物の正確な位置の情報が必要となるが、GPS等の位置検出手段は、周囲の環境に影響を受けやすく、検出精度が不安定であり、検出精度にも限界がある。
【0005】
本発明は、上記の点に鑑みてなされたものであり、その目的とするところは、車両前方の路面凹凸を高精度に検知することができる外界認識システムを提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決する本発明の外界認識システムは、
自車両が走行する路面の3次元形状を認識する外界認識システムであって、
前記自車両は、
車載カメラで撮像した撮像画像から路面上構造物を検出する画像処理を行う画像処理部と、
外部サーバから前記路面上構造物の位置情報を受信する車両通信部と、
該車両通信部により受信した前記路面上構造物の位置情報に基づいて前記画像処理部の画像処理方法を変更する画像処理方法決定部と、
を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、車両前方の路面凹凸を高精度に検知することができる。本発明に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、上記した以外の、課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0008】
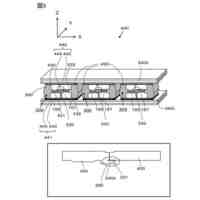
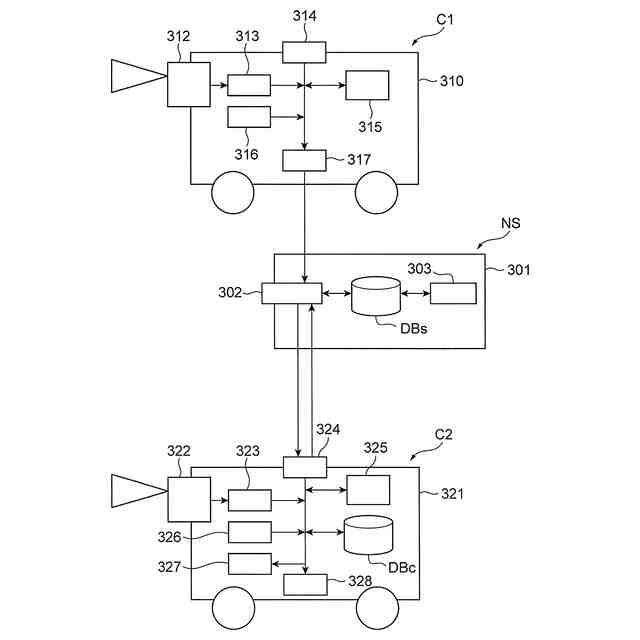
第1実施形態における外界認識システムの全体概要を示す図。
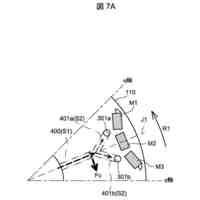
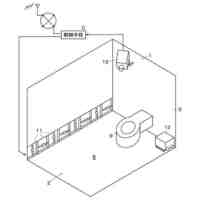
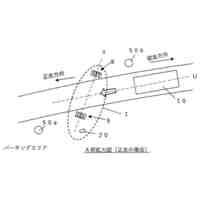
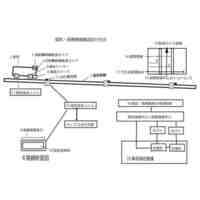
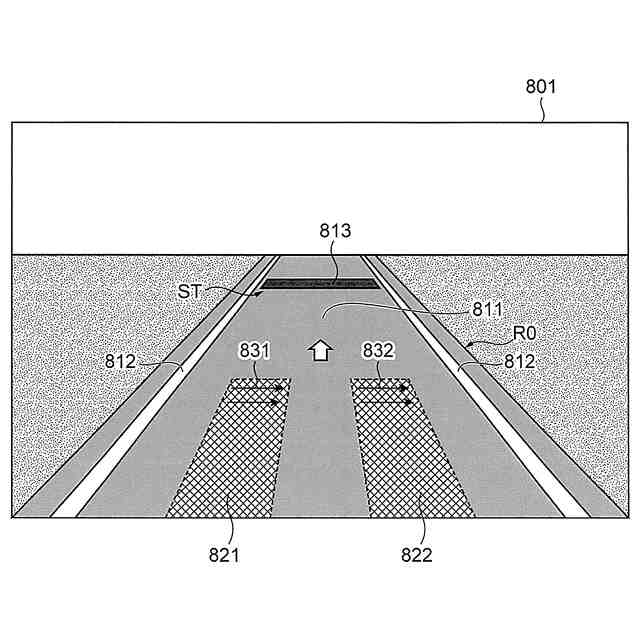
路面上構造物を検出するシーンの例を示す図。
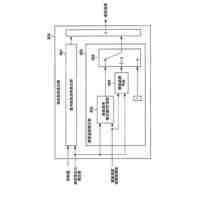
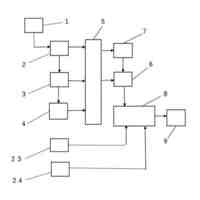
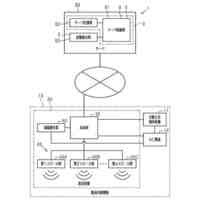
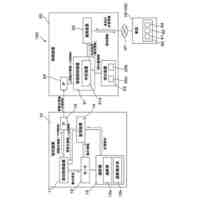
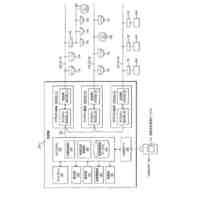
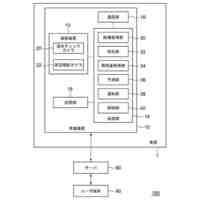
外界認識システムの機能ブロック図。
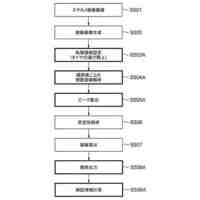
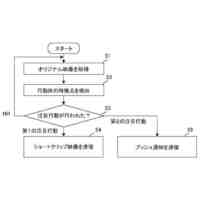
情報提供車両とサーバにおける情報処理の内容を説明するフローチャート。
情報提供車両C1のステレオカメラにより行われる処理の一例を説明するフローチャート。
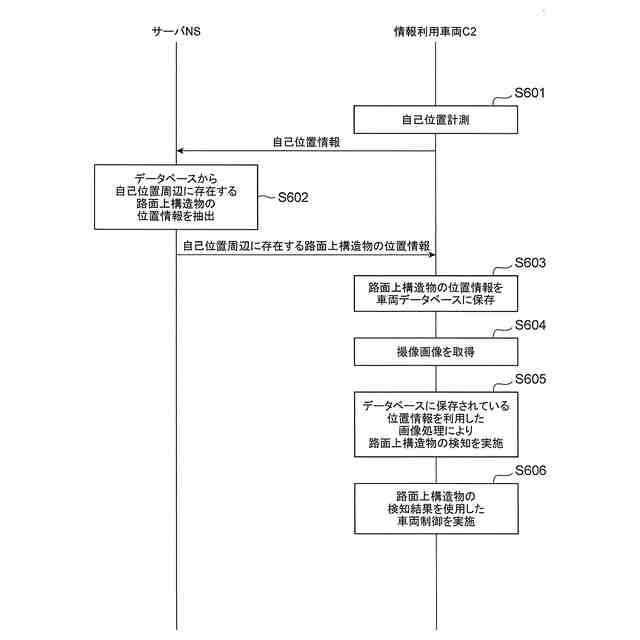
サーバと情報利用車両における情報処理の内容を説明するフローチャート。
情報利用車両C2のステレオカメラによる処理を説明するフローチャート。
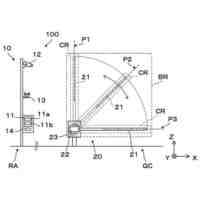
視差画像において画像処理領域を設定する例を示す図。
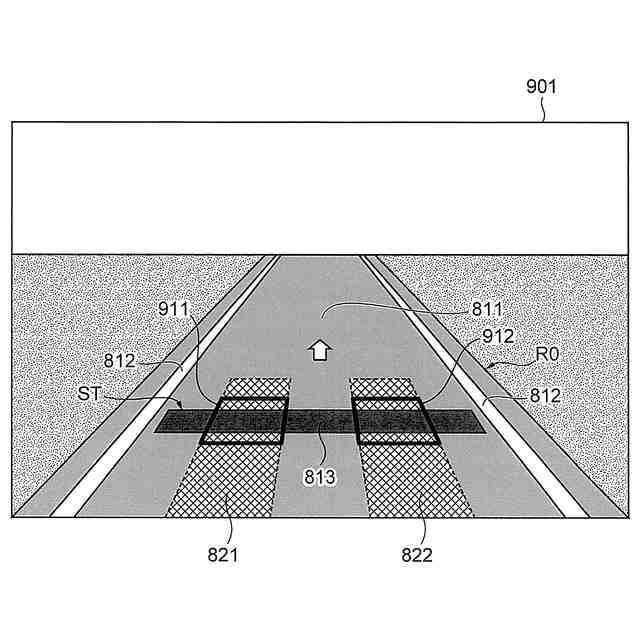
位置情報を利用した画像処理の方法を説明する図。
横方向に探索して路面凹凸の視差を決定する方法を説明する図。
路面凹凸のピーク検知の結果を示す図。
時間経過によるピーク移動の安定性解析方法を説明する図。
第2実施形態における外界認識システムの処理内容を説明するフローチャート。
図13に示す処理を行う状況の一例を示す図。
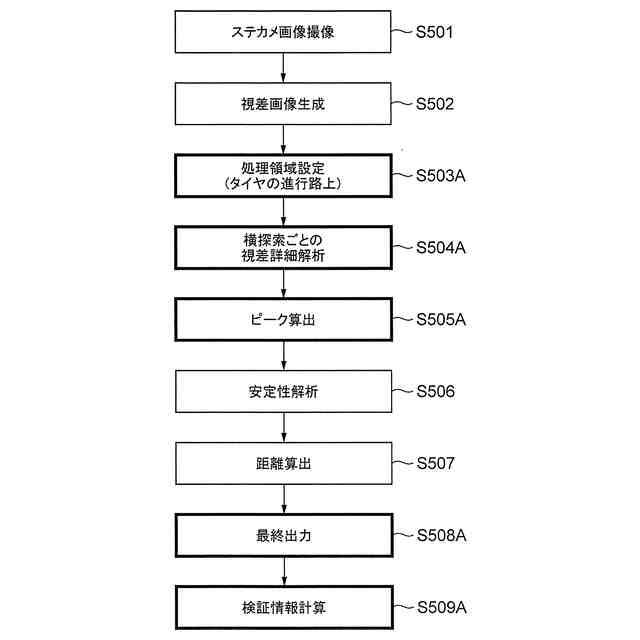
第3実施形態における外界認識システムの処理内容を説明するフローチャート。
【発明を実施するための形態】
【0009】
次に、本発明の実施形態について図面を用いて説明する。
【0010】
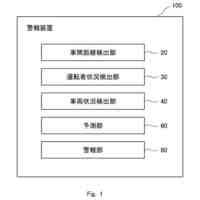
最初に本実施形態の外界認識システムの概要について説明する。図1は、外界認識システムの全体概要を示す図である。本実施形態における外界認識システムは、少なくとも1台以上の情報提供車両C1によって検知された路面状況の情報を、外部サーバであるサーバNSに集約し、情報利用車両C2の周辺の路面状況の情報をサーバNSから情報利用車両C2に配信し、サーバNSから配信された路面状況の情報を用いて情報利用車両C2が路面状況をさらに詳細に検知し、その検知結果に基づいて車両制御を行うシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
Astemo株式会社
撮像装置
4日前
Astemo株式会社
ゲート駆動装置
26日前
Astemo株式会社
エンジン制御装置
20日前
Astemo株式会社
コンデンサユニット
1日前
Astemo株式会社
バンパキャップ、緩衝装置
1日前
Astemo株式会社
ポンプ装置及び船舶推進機
1日前
Astemo株式会社
ソフトウェア更新システム
12日前
Astemo株式会社
画像認識処理の分析方法および分析装置
19日前
Astemo株式会社
カメラ装置およびカメラ装置の製造方法
19日前
Astemo株式会社
回転子、回転電機および電動駆動システム
12日前
Astemo株式会社
内燃機関の制御装置及び内燃機関の制御方法
21日前
Astemo株式会社
電気回路体、電力変換装置、電気回路体の製造方法
5日前
Astemo株式会社
外界認識システム
21日前
個人
安全運転車両
3か月前
個人
自動車ケアフル灯
3か月前
日本精機株式会社
路面投影装置
27日前
能美防災株式会社
発信機
3か月前
ニッタン株式会社
発信機
22日前
個人
防犯に特化したアプリケーション
1か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
2か月前
東京都公立大学法人
液滴検出装置
1か月前
TOA株式会社
拡声放送システム
26日前
個人
逆走・正走車両検出システム
2か月前
日本信号株式会社
情報提供システム
20日前
個人
乗り物の移動を支援する方法及び装置
13日前
株式会社アジラ
データ転送システム
26日前
日本信号株式会社
信号情報システム
20日前
日本信号株式会社
情報提供システム
2か月前
アズビル株式会社
建物管理システム
1か月前
株式会社JVCケンウッド
警報装置
21日前
ホーチキ株式会社
異常報知設備
2か月前
ホーチキ株式会社
異常報知設備
2か月前
個人
磁気・光学誘導路線による車両の運行制御
2か月前
株式会社JVCケンウッド
通知システム
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ