TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102566
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023220097
出願日
2023-12-26
発明の名称
接合作業画像処理装置、接合作業支援システム及び接合作業画像処理プログラム
出願人
株式会社クボタ
代理人
個人
,
個人
主分類
E02F
3/36 20060101AFI20250701BHJP(水工;基礎;土砂の移送)
要約
【課題】接合部材と被接合部材との接合作業を効率化できるような位置情報を生成する接合作業画像処理装置を実現する。
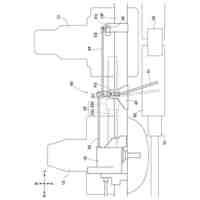
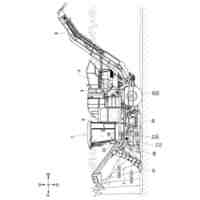
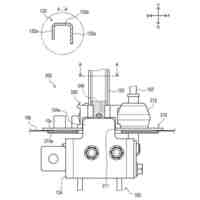
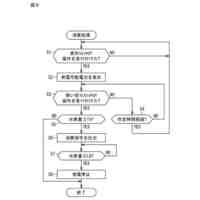
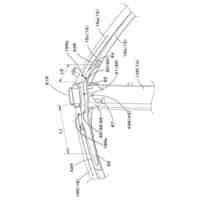
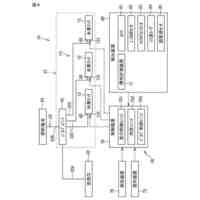
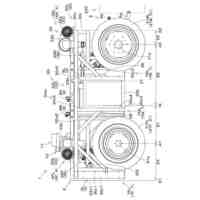
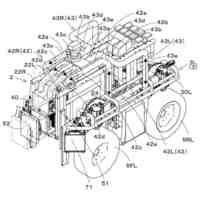
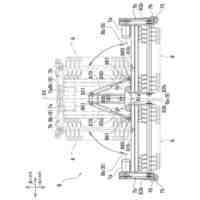
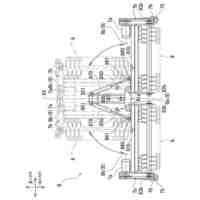
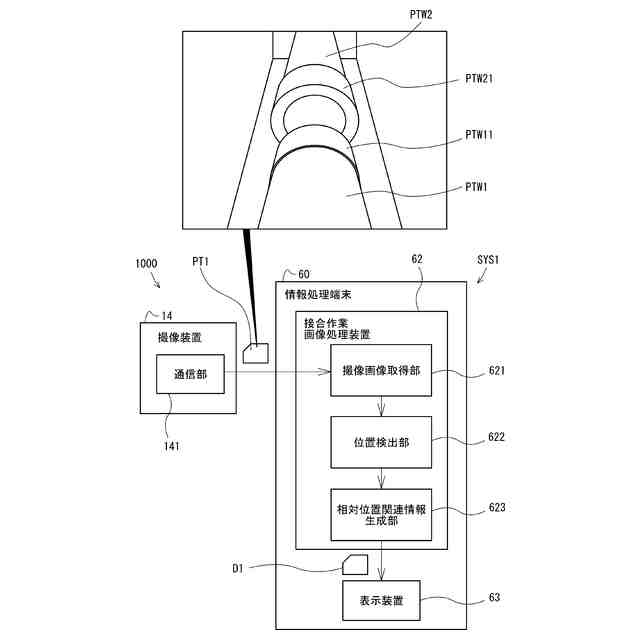
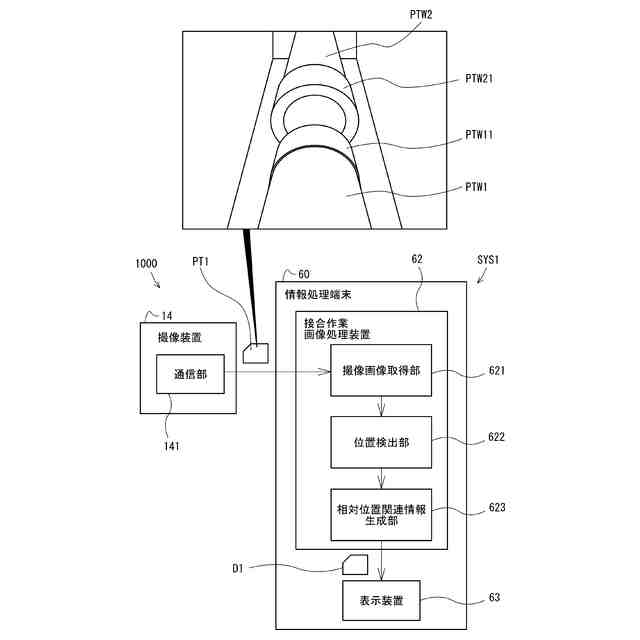
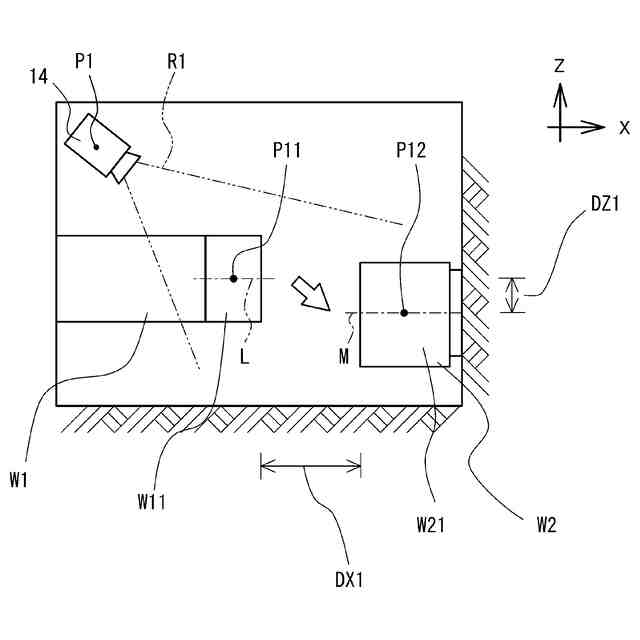
【解決手段】接合作業画像処理装置62は、管W1の挿し口W11及び被接合管W2の挿し口W21を含む撮像画像PT1を、撮像装置14から取得する撮像画像取得部621と、撮像画像PT1に基づいて、管W1と被接合管W2との相対位置を検出する位置検出部622とを有する。位置検出部622は、撮像画像PT1に撮像されている管W1及び被接合管W2の各形状と、予め記憶している管W1及び被接合管W2の各形状とのマッチング処理によって管W1と被接合管W2との相対位置を検出する。
【選択図】図2
特許請求の範囲
【請求項1】
接合部材の少なくとも一部及び前記接合部材に対して接合される被接合部材の少なくとも一部を含む撮像画像を取得する撮像画像取得部と、
前記撮像画像に基づいて、前記接合部材と前記被接合部材との相対位置を検出する位置検出部とを有し、
前記位置検出部は、前記撮像画像に撮像されている前記接合部材及び前記被接合部材の各形状と、予め記憶している前記接合部材及び前記被接合部材の各形状とのマッチング処理によって前記接合部材と前記被接合部材との前記相対位置を検出する、
接合作業画像処理装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の接合作業画像処理装置において、
前記接合部材及び前記被接合部材は、それぞれ軸線方向に延びる管部材であり、前記軸線方向に連結可能に構成されていて、
前記位置検出部は、前記接合部材の接合端部と、前記接合部材の前記接合端部に接合される前記被接合部材の被接合端部との相対距離、及び、前記接合部材の軸線方向と前記被接合部材の軸線方向との相対角度を、前記相対位置として検出する、
接合作業画像処理装置。
【請求項3】
請求項1に記載の接合作業画像処理装置において、
前記接合部材及び被接合部材のそれぞれの形状に関する情報である形状関連情報を記憶するメモリをさらに有し、
前記形状関連情報は、三次元モデルの形状データを含み、
前記位置検出部は、前記形状関連情報を用いて、前記撮像画像に対してパターンマッチング処理を行うことによって、前記接合部材と前記被接合部材との前記相対位置を検出する、
接合作業画像処理装置。
【請求項4】
請求項1に記載の接合作業画像処理装置において、
前記位置検出部の検出結果に基づいて、前記相対位置を示す情報、及び前記接合部材を前記被接合部材に接合する接合作業を支援するためのガイダンス情報の少なくとも一方を含む相対位置関連情報を生成する相対位置関連情報生成部を備えている、
接合作業画像処理装置。
【請求項5】
請求項4に記載の接合作業画像処理装置において、
前記相対位置関連情報生成部は、前記接合作業を支援するために表示装置に表示させるガイダンス画像を含む前記相対位置関連情報を生成する、
接合作業画像処理装置。
【請求項6】
請求項1から請求項5のいずれか一つに記載の接合作業画像処理装置と、
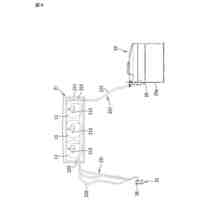
前記接合部材を前記被接合部材に対して相対的に移動させる搬送装置と、
前記接合部材及び前記被接合部材それぞれの少なくとも一部を撮像して前記撮像画像を生成する撮像装置と、
を有する接合作業支援システム。
【請求項7】
請求項6に記載の接合作業支援システムにおいて、
前記搬送装置は、前記接合部材を前記被接合部材に対して位置決めするためのガイド部材を有し、
前記撮像装置は、前記接合部材及び前記被接合部材それぞれの少なくとも一部に加えて前記ガイド部材の少なくとも一部も含む前記撮像画像を取得し、
前記位置検出部は、前記ガイド部材と、前記接合部材または前記被接合部材との相対位置に基づいて、前記接合部材と前記被接合部材との前記相対位置を検出する、
接合作業支援システム。
【請求項8】
請求項6に記載の接合作業支援システムにおいて、
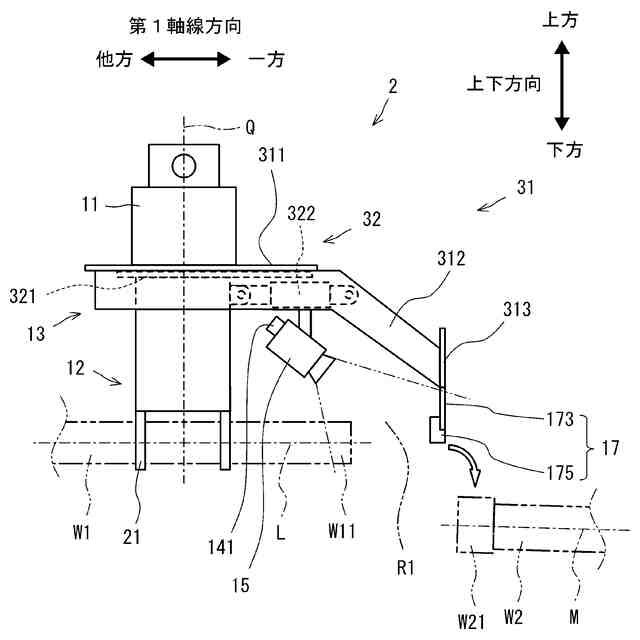
前記搬送装置は、
本体部と、
前記本体部に対して揺動可能なブーム部と、
前記ブーム部に対して揺動可能なアーム部と、
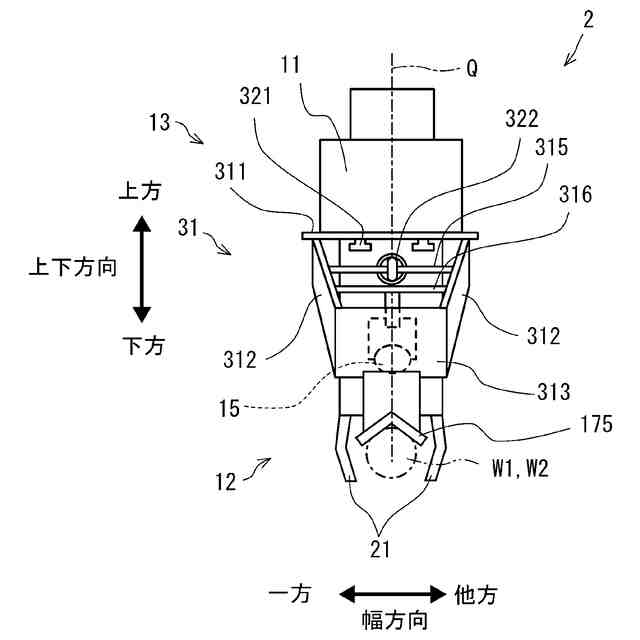
前記アーム部の先端部に取り付けられ、前記接合部材を把持可能な把持装置と、
を有し、
前記撮像装置は、前記把持装置または前記アーム部に設けられている、
接合作業支援システム。
【請求項9】
請求項6に記載の接合作業支援システムにおいて、
前記撮像装置は、単眼カメラである、
接合作業支援システム。
【請求項10】
請求項6に記載の接合作業支援システムにおいて、
前記撮像装置は、前記撮像画像を、無線通信によって前記接合作業画像処理装置に送信する通信部を有する、
接合作業支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像装置によって撮像された撮像画像を処理する接合作業画像処理装置、接合作業支援システム及び接合作業画像処理プログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
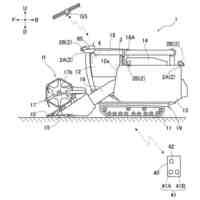
従来、作業機に装着した管接合用アタッチメントを用いて水道管等の管を被接合管に接合する技術が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2023-62320号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、作業機の運転席から接合部材と被接合部材との相対位置を正確に把握することが難しい場合がある。
【0005】
本発明の目的は、接合部材と被接合部材との接合作業を効率化できる位置情報を生成する接合作業画像処理装置を実現することにある。
【課題を解決するための手段】
【0006】
本発明の一実施形態に係る接合作業画像処理装置は、接合部材の少なくとも一部及び前記接合部材に対して接合される被接合部材の少なくとも一部を含む撮像画像を取得する撮像画像取得部と、前記撮像画像に基づいて、前記接合部材と前記被接合部材との相対位置を検出する位置検出部とを有する。前記位置検出部は、前記撮像画像に撮像されている前記接合部材及び前記被接合部材の各形状と、予め記憶している前記接合部材及び前記被接合部材の各形状とのマッチング処理によって前記接合部材と前記被接合部材との前記相対位置を検出する。(第1の構成)。
【0007】
上述の構成によれば、接合部材と被接合部材とを接合する際に、前記接合部材と前記被接合部材との相対位置を撮像画像に基づいて検出することができる。また、位置検出部は、上述のようにマッチング処理によって前記接合部材と前記被接合部材との相対位置を検出する。したがって、前記相対位置を精度良く検出することができる。
【0008】
したがって、作業者は、前記接合部材と前記被接合部材とを相対的に移動させる際に、前記相対位置に基づいて、前記接合部材と前記被接合部材との相対位置をより正確に把握することができる。
【0009】
よって、撮像画像に基づいて、前記接合部材と前記被接合部材との接合作業を効率化できるような位置情報を生成する接合作業画像処理装置を実現できる。
【0010】
前記第1の構成において、前記接合部材及び前記被接合部材は、それぞれ軸線方向に延びる管部材であり、前記軸線方向に連結可能に構成されている。前記位置検出部は、前記接合部材の接合端部と、前記接合部材の前記接合端部に接合される前記被接合部材の被接合端部との相対距離、及び、前記接合部材の軸線方向と前記被接合部材の軸線方向との相対角度を、前記相対位置として検出する(第2の構成)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
11日前
株式会社クボタ
作業車
25日前
株式会社クボタ
移植機
14日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
13日前
株式会社クボタ
収穫機
13日前
株式会社クボタ
作業機
18日前
株式会社クボタ
移植機
14日前
株式会社クボタ
作業車
12日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
収穫機
18日前
株式会社クボタ
作業機
20日前
株式会社クボタ
移植機
13日前
株式会社クボタ
移植機
13日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
キャビン
12日前
株式会社クボタ
キャビン
12日前
株式会社クボタ
作業機械
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業機械
13日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業機械
13日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業装置
13日前
株式会社クボタ
作業車両
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ