TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101099
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217697
出願日
2023-12-25
発明の名称
校正装置、校正方法、プログラム、及び制御装置
出願人
住友重機械工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250630BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡易な手法によって精度の高い校正を行うことの可能な校正装置等を提供する。
【解決手段】本発明の一態様に係る校正方法は、ロボットの座標系である第1座標系及び検出部の座標系である第2座標系を校正する校正方法であって、ロボットに対して所定の位置に取り付けられたマーカであって、複数の面を有するマーカの複数の面を検出部によって検出するステップと、複数の面の検出結果に基づいて、第1座標系及び第2座標系の校正を行うステップと、を含む。
【選択図】図3A
特許請求の範囲
【請求項1】
ロボットの座標系である第1座標系及び検出部の座標系である第2座標系を校正する校正方法であって、
前記ロボットに対して所定の位置に取り付けられたマーカであって、複数の面を有するマーカの前記複数の面を前記検出部によって検出するステップと、
前記複数の面の検出結果に基づいて、前記第1座標系及び前記第2座標系の校正を行うステップと、を含む校正方法。
続きを表示(約 1,300 文字)
【請求項2】
前記複数の面を検出するステップは、前記複数の面それぞれの位置及び向きを算出可能なパラメータを検出するステップを含む、請求項1に記載の校正方法。
【請求項3】
前記校正を行うステップは、
前記複数の面の検出結果に基づいて、前記ロボットと前記検出部との位置関係を示す位置関係情報を算出するステップ、を含む、請求項1に記載の校正方法。
【請求項4】
前記校正を行うステップは、
前記第1座標系又は前記第1座標系に対する所定の座標変換によって得られる第3座標系における前記複数の面の位置である第1位置を取得するステップと、
前記複数の面の検出結果に基づいて算出される前記第2座標系における前記複数の面の位置を、前記第1座標系又は前記第3座標系に変換することにより第2位置を取得するステップと、
前記第1位置と前記第2位置との誤差に基づいて、前記位置関係情報を算出するステップと、を含む、請求項3に記載の校正方法。
【請求項5】
前記位置関係情報は、前記第1座標系と前記第2座標系との間の座標変換行列である、請求項3に記載の校正方法。
【請求項6】
前記校正を行うステップの結果に基づいて、前記ロボットを制御するステップ、を更に含む、請求項1に記載の校正方法。
【請求項7】
前記検出部は、対象物の深度情報を検出する三次元カメラを含み、
前記複数の面を前記検出部によって検出するステップは、
前記三次元カメラによって前記複数の面に基づく点群の深度情報を検出するステップと、
前記点群の深度情報に基づいて、前記複数の面を示す情報を算出するステップと、を含む、請求項1に記載の校正方法。
【請求項8】
前記検出部は、撮像により画像を生成する二次元カメラを含み、
前記複数の面を前記検出部によって検出するステップは、
前記二次元カメラによって前記複数の面を撮像することにより画像を生成するステップと、
前記画像に基づいて、前記複数の面を示す情報を算出するステップと、を含む、請求項1に記載の校正方法。
【請求項9】
コンピュータを、ロボットの座標系である第1座標系及び検出部の座標系である第2座標系を校正する校正装置として機能させるプログラムであって、
前記コンピュータに、
前記ロボットに対して所定の位置に取り付けられたマーカであって、複数の面を有するマーカの前記複数の面を前記検出部によって検出するステップと、
前記複数の面の検出結果に基づいて、前記第1座標系及び前記第2座標系の校正を行うステップと、を実行させるプログラム。
【請求項10】
ロボットの座標系である第1座標系及び検出部の座標系である第2座標系を校正する校正装置であって、
前記ロボットに対して所定の位置に取り付けられたマーカであって、複数の面を有するマーカの前記複数の面を前記検出部によって検出する面検出部と、
前記複数の面の検出結果に基づいて、前記第1座標系及び前記第2座標系の校正を行う校正部と、を備える校正装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、校正装置、校正方法、プログラム、及び制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
工業製品の生産現場で、ロボット装置が広く用いられるようになっている。この種のロボット装置において、ワークのピッキングや組立の作業を自動的に精度よく行うために、ロボットとカメラとを組合せたシステム構成が知られている。当該システム構成における、ロボット座標系とカメラ座標系との校正の種々の方法が提案されている。
【0003】
例えば、特許文献1には、シート光を照射して形状計測する光学式センサをツール先端付近に取り付けたロボットシステムが開示されている。当該ロボットシステムでは、三角錐形状を呈するキャリブレーションターゲットに対してシート光を走査させながら照射し、キャリブレーションターゲットの立体形状に起因する屈曲点変化に基づいて算出したツール位置に基づいて校正が行われる。
【先行技術文献】
【特許文献】
【0004】
特開2014-18932号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の手法では、シート光を走査するためのシート光光源やキャリブレーションターゲットの制御が煩雑であり、また、三角錐形状のうち稜線の位置のみを検出に用いているため校正の精度が低下する場合があった。
【0006】
そこで、本発明は、上述した点に鑑みてなされたものであって、簡易な手法によって精度の高い校正を行うことの可能な校正装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る校正方法は、ロボットの座標系である第1座標系及び検出部の座標系である第2座標系を校正する校正方法であって、ロボットに対して所定の位置に取り付けられたマーカであって、複数の面を有するマーカの複数の面を検出部によって検出するステップと、複数の面の検出結果に基づいて、第1座標系及び第2座標系の校正を行うステップと、を含む。
【0008】
この態様によれば、検出光をオブジェクトに対して走査する制御等を行わずとも、検出部によって、マーカの複数の面を含むように検出することにより簡易に校正を行うことが可能となる。また、マーカは複数の面を有しているため、当該複数の面の情報に基づいて第1座標系及び第2座標系の校正を行うことが可能となり、校正の精度が向上する。
【発明の効果】
【0009】
本発明によれば、簡易な手法によって精度の高い校正を行うことの可能な校正装置等を提供することができる。
【図面の簡単な説明】
【0010】
本実施形態に係る搬送システム100の概略構成を示す図である。
本実施形態に係る搬送システム100の機能ブロックを示す図である。
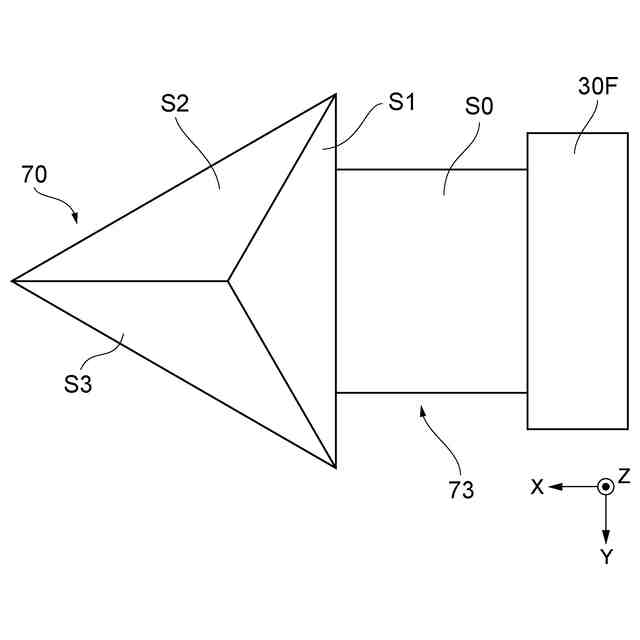
フランジ30Fに取り付けられたマーカ70をZ軸負方向に向かって視認した場合の構成の一例を示す概略図である。
フランジ30Fに取り付けられたマーカ70をY軸負方向に向かって視認した場合の構成の一例を示す概略図である。
本実施形態に係る校正装置50による校正に関する動作処理の一例を示す動作フロー図である。
本実施形態の変形例に係る校正装置50による校正に関する動作処理の一例を示す動作フロー図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
18日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
7日前
株式会社ダイヘン
移動体
1か月前
住友重機械工業株式会社
教示装置
4日前
個人
ペグハンマおよびペグハンマ用部品
11日前
株式会社ダイヘン
搬送装置
11日前
川崎重工業株式会社
ロボット
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
4日前
工機ホールディングス株式会社
作業機
4日前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
住友重機械工業株式会社
支援装置
11日前
住友重機械工業株式会社
支援装置
11日前
ホシデン株式会社
分解用治具
11日前
アピュアン株式会社
衝撃工具
13日前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
26日前
株式会社マキタ
電気機器
5日前
工機ホールディングス株式会社
作業機
7日前
工機ホールディングス株式会社
作業機
7日前
川崎重工業株式会社
ロボットシステム
27日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
7日前
株式会社リコー
多関節ロボット
11日前
工機ホールディングス株式会社
作業機
7日前
株式会社安川電機
ロボット
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
SMC株式会社
ベルヌーイグリッパ
7日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社ジャノメ
ロボット
1か月前
セイコーエプソン株式会社
ロボット
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































