TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100459
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2024221796
出願日
2024-12-18
発明の名称
少なくとも一つの特定のシュード3Dバウンディングボックスを自動に生成することによって少なくとも一つの特定の客体をラベリングする方法及びこれを利用したコンピューティング装置{METHOD FOR LABELING AT LEAST ONE SPECIFIC OBJECT BY AUTOMATICALLY CREATING AT LEAST ONE SPECIFIC PSEUDO 3D BOUNDING BOX AND COMPUTING DEVICE USING THE SAME}
出願人
株式会社ストラドビジョン
,
STRADVISION,INC.
代理人
個人
,
個人
主分類
G06T
7/00 20170101AFI20250626BHJP(計算;計数)
要約
【課題】特定のシュード3Dバウンディングボックスを自動に生成することによって特定の客体をラベリングする方法及び装置を提供する。
【解決手段】方法は、ライダーデータ、イメージデータ及びキャリブレーションデータを含むローデータを利用してイメージ座標系上に少なくとも一つのプロジェクションされたライダー3Dバウンディングボックスを獲得し、ライダー3Dバウンディングボックス及びイメージ座標系上のGT用2Dバウンディングボックスに対して相互マッチングしているか否かを判断し、マッチングしている場合、第1のライダー3Dバウンディングボックスを第1のGT用2Dバウンディングボックスにフィッティングするために第1のライダー3Dバウンディングボックスに対してリグレッションを行い、かつ、マッチングしていない場合、特定のシュード3Dバウンディングボックスを生成してリグレッションを行う。
【選択図】図2
特許請求の範囲
【請求項1】
少なくとも一つの特定のシュード3Dバウンディングボックスを自動に生成することによって少なくとも一つの特定の客体をラベリングする方法において、
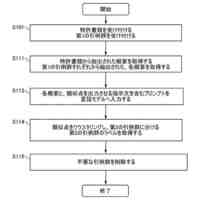
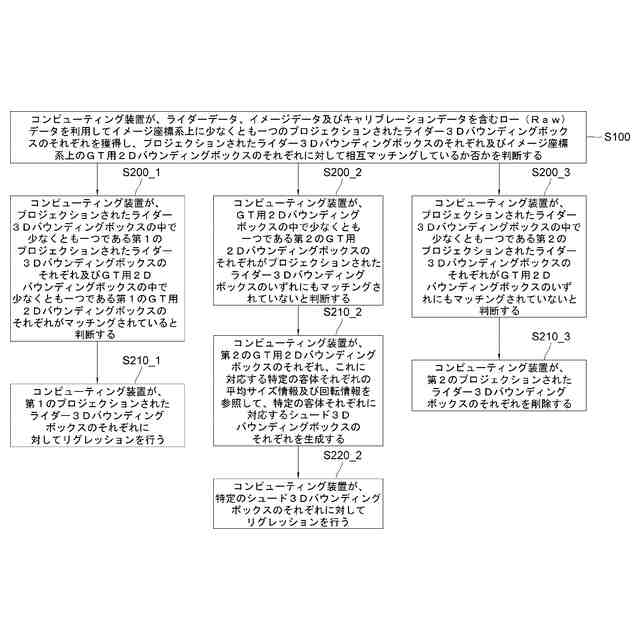
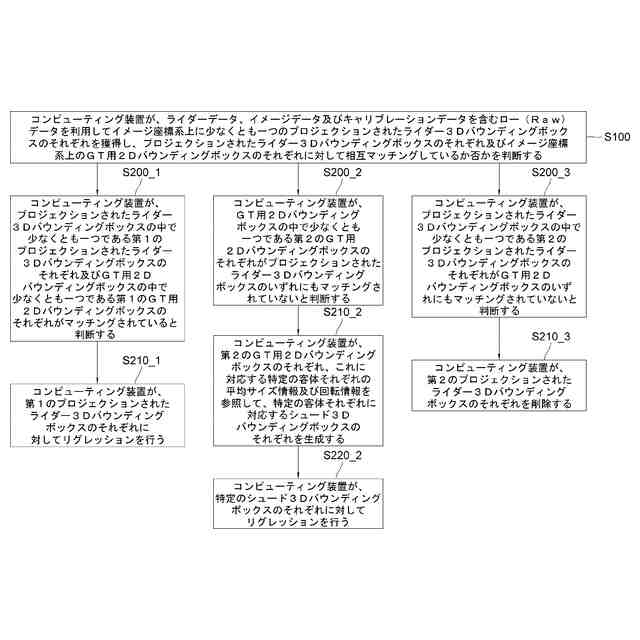
(a)コンピューティング装置が、ライダーデータ、イメージデータ及びキャリブレーションデータを含むロー(raw)データを利用してイメージ座標系上に少なくとも一つのプロジェクションされたライダー3Dバウンディングボックスのそれぞれを獲得し、前記プロジェクションされたライダー3Dバウンディングボックスのそれぞれ及び前記イメージ座標系上のGT用2Dバウンディングボックスのそれぞれに対して相互マッチングしているか否かを判断する段階;及び
(b)(b1)前記プロジェクションされたライダー3Dバウンディングボックスの中で少なくとも一つである第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれ及び前記GT用2Dバウンディングボックスの中で少なくとも一つである第1のGT用2Dバウンディングボックスのそれぞれがマッチングされていると判断されれば、前記コンピューティング装置が、前記第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれを前記第1のGT用2Dバウンディングボックスのそれぞれにフィッティング(fitting)するために、前記第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれに対してリグレッション(regression)を行うサブプロセス、及び(b2)前記GT用2Dバウンディングボックスの中で少なくとも一つである第2のGT用2Dバウンディングボックスのそれぞれが前記プロジェクションされたライダー3Dバウンディングボックスのいずれにもマッチングされていないと判断されれば、前記コンピューティング装置が、前記第2のGT用2Dバウンディングボックスのそれぞれ、前記第2のGT用2Dバウンディングボックスのそれぞれに対応する特定の客体それぞれの平均サイズ情報及び回転情報を参照して前記特定の客体それぞれに対応する特定のシュード3Dバウンディングボックスのそれぞれを生成し、前記特定のシュード3Dバウンディングボックスのそれぞれを前記第2のGT用2Dバウンディングボックスのそれぞれにフィッティングするために前記特定のシュード3Dバウンディングボックスのそれぞれに対して前記リグレッションを行うサブプロセスを行う段階;
を含む方法。
続きを表示(約 4,100 文字)
【請求項2】
前記(a)段階において、
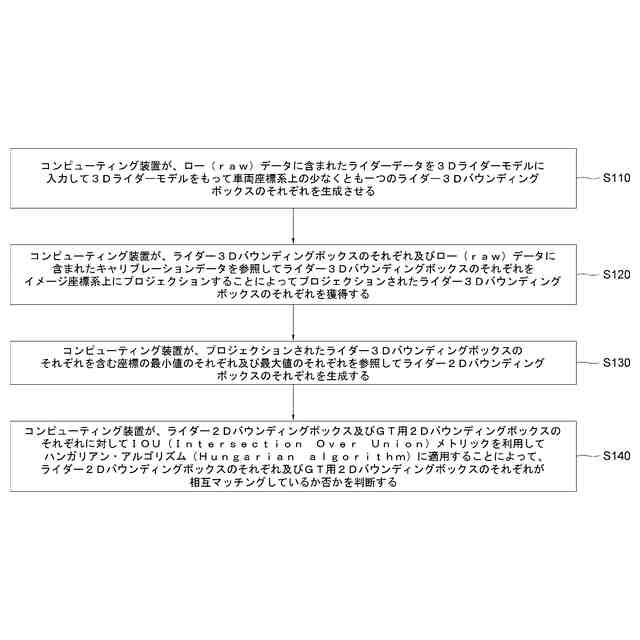
前記コンピューティング装置が、前記ローデータに含まれた前記ライダーデータを3Dライダーモデルに入力して前記3Dライダーモデルをもって車両座標系上に少なくとも一つのライダー3Dバウンディングボックスのそれぞれを生成するようにし、前記ライダー3Dバウンディングボックスのそれぞれ及び前記ローデータに含まれた前記キャリブレーションデータを参照して前記ライダー3Dバウンディングボックスのそれぞれを前記イメージ座標系上にプロジェクションすることによって前記プロジェクションされたライダー3Dバウンディングボックスのそれぞれを獲得し、前記プロジェクションされたライダー3Dバウンディングボックスのそれぞれを含む座標の最小値のそれぞれ及び最大値のそれぞれを参照してライダー2Dバウンディングボックスのそれぞれを生成し、前記ライダー2Dバウンディングボックスのそれぞれ及び前記GT用2Dバウンディングボックスのそれぞれが相互マッチングしているか否かを判断するために、IOU(Intersection Over Union)メトリックを利用してハンガリアン・アルゴリズム(Hungarian algorithm)を適用することを特徴とする、請求項1に記載の方法。
【請求項3】
前記(b1)サブプロセスにおいて、
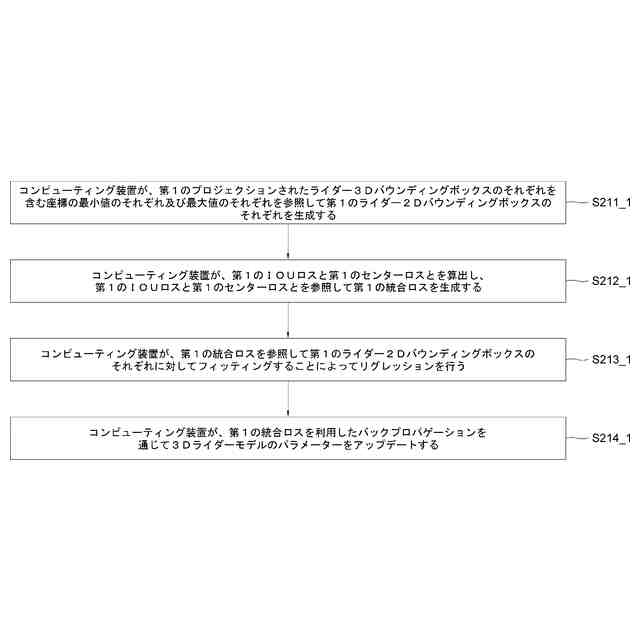
前記コンピューティング装置が、前記第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれを含む座標の最小値のそれぞれ及び最大値のそれぞれを参照して第1のライダー2Dバウンディングボックスのそれぞれを生成し、前記第1のライダー2Dバウンディングボックスのそれぞれ及び前記第1のGT用2Dバウンディングボックスのそれぞれを参照してIOUメトリックを適用することによって獲得されるマッチング比率に対するロスである第1のIOUロスを算出し、前記第1のプロジェクションされた2Dバウンディングボックスそれぞれの各中央値及び前記第1のGT用2Dバウンディングボックスそれぞれの各中央値の間の各差分値を参照して生成されるロスである第1のセンターロスを算出し、前記第1のIOUロス及び前記第1のセンターロスを参照して第1の統合ロスを生成し、前記第1の統合ロスを参照して前記第1のライダー2Dバウンディングボックスのそれぞれをフィッティングすることによって前記リグレッションを行い、前記第1の統合ロスを利用したバックプロパゲーションを通じて3Dライダーモデル(前記3Dライダーモデルは、前記ローデータに含まれた前記ライダーデータが入力されて車両座標系上に少なくとも一つのライダー3Dバウンディングボックスのそれぞれを生成するモデルである)のパラメーターをアップデートすることを特徴とする、請求項1に記載の方法。
【請求項4】
前記(b2)サブプロセスにおいて、
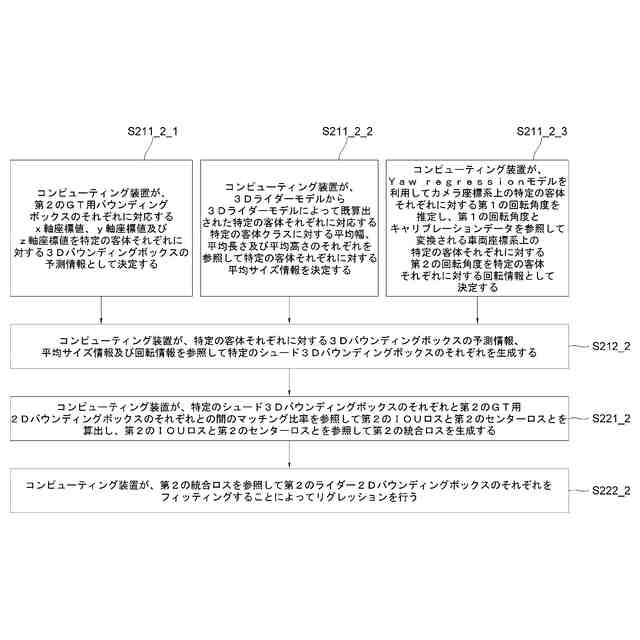
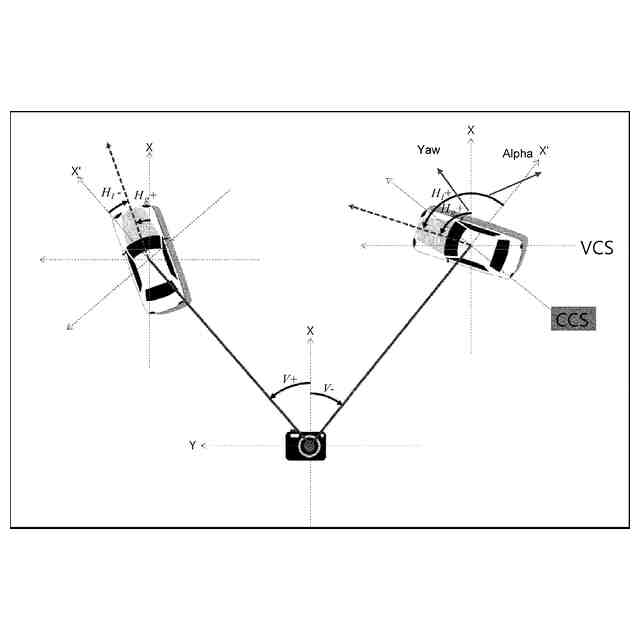
前記コンピューティング装置が、前記第2のGT用2Dバウンディングボックスのそれぞれを参照して前記第2のGT用2Dバウンディングボックスそれぞれの前記イメージ座標系上の2Dバウンディングボックスの位置情報に対するx軸座標値のそれぞれとy軸座標値のそれぞれとを獲得し、前記ローデータに含まれた前記ライダーデータ上の前記2Dバウンディングボックスの位置情報のデプス情報を参照して前記イメージ座標系上の前記2Dバウンディングボックスの位置情報に対するz軸座標値を獲得し、前記2Dバウンディングボックスの位置情報を参照して前記特定の客体それぞれに対する3Dバウンディングボックスの位置予測情報を決定し、前記第2のGT用2Dバウンディングボックスのそれぞれを通じて確認された前記特定の客体それぞれに対応する特定の客体クラスのそれぞれを参照して3Dライダーモデル(前記3Dライダーモデルは、前記ローデータに含まれた前記ライダーデータが入力されて車両座標系上に少なくとも一つのライダー3Dバウンディングボックスのそれぞれを生成するモデルである)から前記3Dライダーモデルによって既算出された前記特定の客体クラスのそれぞれに対応する平均幅、平均長さ及び平均高さのそれぞれを獲得し、前記特定の客体クラスのそれぞれに対応する前記平均幅、前記平均長さ及び前記平均高さのそれぞれを参照して前記特定の客体それぞれに対する前記平均サイズ情報を決定し、前記ローデータの中で前記イメージデータをYaw regression(ヨー・リグレッション)モデルに入力して、前記Yaw regressionモデルをもってカメラ座標系上の前記特定の客体それぞれに対する第1の回転角度を出力するようにし、前記第1の回転角度及び前記ローデータに含まれた前記キャリブレーションデータを参照して前記第1の回転角度を前記車両座標系上の前記特定の客体それぞれに対する第2の回転角度に変換することによって前記第2の回転角度を前記特定の客体それぞれに対する前記回転情報として決定し、前記3Dバウンディングボックスの位置予測情報、前記特定の客体それぞれに対する前記平均サイズ情報及び前記回転情報を参照して前記特定のシュード3Dバウンディングボックスのそれぞれを生成することを特徴とする、請求項1に記載の方法。
【請求項5】
前記(b2)サブプロセスにおいて、
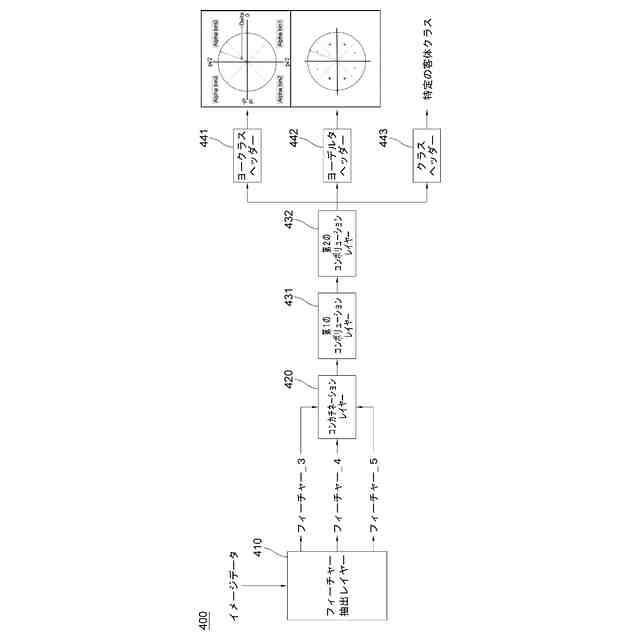
前記コンピューティング装置が、前記イメージデータを前記Yaw regressionモデルに入力して、前記Yaw regressionモデルをもって複数のフィーチャーのそれぞれを出力するようにし、前記複数のフィーチャーのそれぞれにconcatenation(コンカチネーション)演算及びconvolution(コンボリューション)演算を順次適用するようにした後、Yaw(ヨー)クラスヘッダーを通じて複数のマルチビンクラスの中で前記特定の客体の前方が指す方向に対応する特定のマルチビンクラスに分類されるようにし、前記複数のマルチビンクラスのそれぞれに対応して既設定された各基準角度の中で、前記特定のマルチビンクラスに対応して既設定された特定の基準角度から前記特定の客体が回転された角度である第3の回転角度を獲得するようにし、前記Yawデルタヘッダーを通じて前記複数のマルチビンクラスのそれぞれの前記各基準角度を基準にして既設定された複数の符号値のそれぞれを参照して前記特定の客体の前方が指す方向に対応する特定の符号値を獲得するようにし、前記第3の回転角度に前記特定の符号値を与えて第3の調整回転角度を獲得するようにし、前記第3の調整回転角度及び前記特定の基準角度を参照して前記特定の客体に対する前記第1の回転角度を推定させることを特徴とする、請求項4に記載の方法。
【請求項6】
前記(b2)サブプロセスにおいて、
前記特定のシュード3Dバウンディングボックスのそれぞれが生成されれば、前記コンピューティング装置が、IOUメトリックを利用して前記特定のシュード3Dバウンディングボックスのそれぞれと前記第2のGT用2Dバウンディングボックスのそれぞれとの間のマッチング比率を算出し、前記マッチング比率が既設定されたしきい値比率未満であると判断されれば、前記特定のシュード3Dバウンディングボックスのそれぞれに対して前記リグレッションを行うことを特徴とする、請求項4に記載の方法。
【請求項7】
前記(b2)サブプロセスにおいて、
前記コンピューティング装置が、前記特定のシュード3Dバウンディングボックスのそれぞれを含む座標の最小値のそれぞれ及び最大値のそれぞれを参照して特定のシュード2Dバウンディングボックスのそれぞれを生成し、前記特定のシュード2Dバウンディングボックスのそれぞれ及び前記第2のGT用2Dバウンディングボックスのそれぞれを参照して前記IOUメトリックを適用することによって獲得される前記マッチング比率に対するロスである第2のIOUロスを算出し、前記特定のシュード2Dバウンディングボックスそれぞれの各中央値及び前記第2のGT用2Dバウンディングボックスそれぞれの各中央値の間の各差分値を参照して生成されるロスである第2のセンターロスを算出し、前記第2のIOUロス及び前記第2のセンターロスを参照して第2の統合ロスを生成し、前記第2の統合ロスを参照して前記特定のシュード2Dバウンディングボックスのそれぞれをフィッティングすることによって前記リグレッションを行うことを特徴とする、請求項6に記載の方法。
【請求項8】
前記(b2)サブプロセスにおいて、
前記プロジェクションされたライダー3Dバウンディングボックスの中で少なくとも一つである第2のプロジェクションされたライダー3Dバウンディングボックスのそれぞれが前記GT用2Dバウンディングボックスのいずれにもマッチングされていないと判断されれば、前記コンピューティング装置が、前記第2のプロジェクションされたライダー3Dバウンディングボックスのそれぞれを削除することを特徴とする、請求項1に記載の方法。
【請求項9】
前記(a)段階において、
前記キャリブレーションデータは、カメラのイントリンシック(Intrinsic)パラメーター、エクストリンシック(Extrinsic)パラメーター及び前記ライダーデータを前記イメージデータに変換するための変換パラメーターを含むことを特徴とする、請求項1に記載の方法。
【請求項10】
前記GT用2Dバウンディングボックスは、所定のカメラによって生成された前記イメージデータが入力されてディープラーニングモデルを通じて前記特定の客体を検出し、前記特定の客体に2Dバウンディングボックスを生成したデータから獲得されることを特徴とする、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、少なくとも一つの特定のシュード3Dバウンディングボックスを自動に生成することによって少なくとも一つの特定の客体をラベリングする方法及びこれを利用したコンピューティング装置に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
最近、機械学習(machine learning)を利用して客体を識別する方法
などに関する研究が行われている。このような機械学習の一環として、入力層と出力層との間にいくつかの隠れ層(hidden layer)を持つニューラルネットワークを利用したディープラーニングは高い識別性能を有する。
【0003】
そして、ディープラーニングを利用するニューラルネットワークは、一般に、ロスを利用したバックプロパゲーションを通じて学習を行うが、ディープラーニングネットワークの学習を行うためには、ラベリングツールによって客体にタッグ、すなわち、ラベルを追加したトレーニングデータが必要である。このようなトレーニングデータを準備するために、従来はマウスポインタなどを利用して3Dバウンディングボックスを生成するなどの単純な作業機能を追加するためのラベリングツールを具現したので、ラベリングツールの開発のための工数が大きくないという長所がある。
【0004】
しかし、既存のラベリングツールを利用して作業する場合、作業者が直接マウスポインタを利用して3Dバウンディングボックスを生成するので、繰り返して作業することによって発生する作業者の集中力低下により、間違ってラベリングされる場合が頻繁であり、実際、事前に作業者にラベリング関連の教育を実施しても、依然としてラベリング関連の間違いが確認され、これによってラベリング作業が行われた結果物を別途回収するための工数が追加発生するという問題点がある。
【0005】
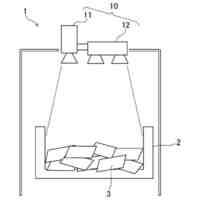
また、2Dバウンディングボックスを生成する場合には、作業者がイメージ上の客体を確認した状態で、マウスポインタを利用してドラァグすることで客体を含むようにボックスを生成することができるが、3Dバウンディングボックスを生成するためには、客体に対応する3次元座標情報(x、y、z)を確認した状態で、3Dバウンディングボックスのサイズ情報(width、height、length)と回転情報(roll、pitch、yaw)とを適宜設定すべきであるが、該当作業の難易度が高いため、客体一つ当たりの作業時間が多くかかるという問題点がある。
【0006】
したがって、前記問題点を解決するための改善方案が要求される実情である。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述の問題点を解決することをその目的とする。
【0008】
また、本発明は、ライダーデータ、イメージデータ及びキャリブレーションデータを含むローデータを利用してイメージ座標系上に少なくとも一つのプロジェクションされたライダー3Dバウンディングボックスのそれぞれを獲得し、(i)前記プロジェクションされたライダー3Dバウンディングボックスの中で少なくとも一つである第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれ及びGT用2Dバウンディングボックスの中で少なくとも一つである第1のGT用2Dバウンディングボックスのそれぞれがマッチングされていると判断されれば、前記第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれを前記第1のGT用2Dバウンディングボックスのそれぞれにフィッティング(fitting)するために前記第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれに対してリグレッション(regression)を行い、(ii)前記GT用2Dバウンディングボックスの中で少なくとも一つである第2のGT用2Dバウンディングボックスのそれぞれが前記プロジェクションされたライダー3Dバウンディングボックスのいずれにもマッチングされていないと判断されれば、前記第2のGT用2Dバウンディングボックスのそれぞれ及びこれに対応する特定の客体それぞれの平均サイズ情報及び回転情報を参照して前記特定の客体それぞれに対応する特定のシュード3Dバウンディングボックスのそれぞれを生成し、前記特定のシュード3Dバウンディングボックスのそれぞれを前記第2のGT用2Dバウンディングボックスのそれぞれにフィッティングするために前記特定のシュード3Dバウンディングボックスのそれぞれに対して前記リグレッションを行うことを他の目的とする。
【課題を解決するための手段】
【0009】
本発明の一実施例によると、少なくとも一つの特定のシュード3Dバウンディングボックスを自動に生成することによって少なくとも一つの特定の客体をラベリングする方法において、(a)コンピューティング装置が、ライダーデータ、イメージデータ及びキャリブレーションデータを含むロー(raw)データを利用してイメージ座標系上に少なくとも一つのプロジェクションされたライダー3Dバウンディングボックスのそれぞれを獲得し、前記プロジェクションされたライダー3Dバウンディングボックスのそれぞれ及び前記イメージ座標系上のGT用2Dバウンディングボックスのそれぞれに対して相互マッチングしているか否かを判断する段階;及び(b)(b1)前記プロジェクションされたライダー3Dバウンディングボックスの中で少なくとも一つである第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれ及び前記GT用2Dバウンディングボックスの中で少なくとも一つである第1のGT用2Dバウンディングボックスのそれぞれがマッチングされていると判断されれば、前記コンピューティング装置が、前記第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれを前記第1のGT用2Dバウンディングボックスのそれぞれにフィッティング(fitting)するために、前記第1のプロジェクションされたライダー3Dバウンディングボックスのそれぞれに対してリグレッション(regression)を行うサブプロセス、及び(b2)前記GT用2Dバウンディングボックスの中で少なくとも一つである第2のGT用2Dバウンディングボックスのそれぞれが前記プロジェクションされたライダー3Dバウンディングボックスのいずれにもマッチングされていないと判断されれば、前記コンピューティング装置が、前記第2のGT用2Dバウンディングボックスのそれぞれ、前記第2のGT用2Dバウンディングボックスのそれぞれに対応する特定の客体それぞれの平均サイズ情報及び回転情報を参照して前記特定の客体それぞれに対応する特定のシュード3Dバウンディングボックスのそれぞれを生成し、前記特定のシュード3Dバウンディングボックスのそれぞれを前記第2のGT用2Dバウンディングボックスのそれぞれにフィッティングするために前記特定のシュード3Dバウンディングボックスのそれぞれに対して前記リグレッションを行うサブプロセスを行う段階;を含む方法が提供される。
【0010】
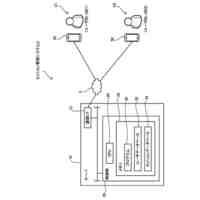
一例において、前記(a)段階において、前記コンピューティング装置が、前記ローデータに含まれた前記ライダーデータを3Dライダーモデルに入力して前記3Dライダーモデルをもって車両座標系上に少なくとも一つのライダー3Dバウンディングボックスのそれぞれを生成するようにし、前記ライダー3Dバウンディングボックスのそれぞれ及び前記ローデータに含まれた前記キャリブレーションデータを参照して前記ライダー3Dバウンディングボックスのそれぞれを前記イメージ座標系上にプロジェクションすることによって前記プロジェクションされたライダー3Dバウンディングボックスのそれぞれを獲得し、前記プロジェクションされたライダー3Dバウンディングボックスのそれぞれを含む座標の最小値のそれぞれ及び最大値のそれぞれを参照してライダー2Dバウンディングボックスのそれぞれを生成し、前記ライダー2Dバウンディングボックスのそれぞれ及び前記GT用2Dバウンディングボックスのそれぞれが相互マッチングしているか否かを判断するために、IOU(Intersection Over Union)メトリックを利用してハンガリアン・アルゴリズム(Hungarian algorithm)を適用することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
27日前
個人
情報処理装置
27日前
個人
情報処理装置
23日前
個人
検査システム
1日前
個人
記入設定プラグイン
15日前
株式会社サタケ
籾摺・調製設備
今日
個人
不動産売買システム
7日前
個人
情報入力装置
27日前
キヤノン電子株式会社
携帯装置
今日
個人
物価スライド機能付生命保険
27日前
個人
マイホーム非電子入札システム
27日前
サクサ株式会社
中継装置
今日
キヤノン株式会社
情報処理装置
今日
株式会社BONNOU
管理装置
20日前
キヤノン株式会社
情報処理装置
今日
アスエネ株式会社
排水量管理方法
今日
ホシデン株式会社
タッチ入力装置
7日前
株式会社ワコム
電子消去具
7日前
東洋電装株式会社
操作装置
今日
東洋電装株式会社
操作装置
今日
株式会社東芝
電子機器
8日前
キヤノン電子株式会社
名刺管理システム
1日前
個人
パターン抽出方法及び通信多重化方法
6日前
株式会社ライト
情報処理装置
20日前
株式会社JVCケンウッド
管理装置
1日前
大王製紙株式会社
RFIDタグ
6日前
住友重機械工業株式会社
力覚伝達装置
22日前
株式会社CBE-A
情報処理システム
6日前
株式会社mov
情報処理システム
27日前
株式会社WellGo
個人情報利用方法
23日前
キヤノン株式会社
通信端末
1日前
株式会社半導体エネルギー研究所
検索支援方法
20日前
シャープ株式会社
通信装置
27日前
株式会社半導体エネルギー研究所
会計システム
13日前
株式会社寺岡精工
顔認証システム
1日前
株式会社豆蔵
ピッキング装置
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ