TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096143
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2024172742
出願日
2024-10-01
発明の名称
自動走行方法、自動走行システム、および、プログラム
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人 佐野特許事務所
主分類
A01B
69/00 20060101AFI20250619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行を行う作業車両を用いて効率良く作業を行うことができる技術を提供する。
【解決手段】例示的な自動走行方法は、作業車両の自動走行方法であって、オペレータによる方向指示を含む所定操作を受け付けると、前記作業車両に前記方向指示で指定された方向へ自動で旋回走行を行わせることを実行する。
【選択図】図5
特許請求の範囲
【請求項1】
作業車両の自動走行方法であって、
オペレータによる方向指示を含む所定操作を受け付けると、前記作業車両に前記方向指示で指定された方向へ自動で旋回走行を行わせることを実行する、自動走行方法。
続きを表示(約 1,000 文字)
【請求項2】
前記作業車両に自動走行を行わせる走行経路を設定することを実行し、
前記作業車両が前記走行経路に沿って前記自動走行を行っている際に前記所定操作を受け付けると、前記作業車両に前記旋回走行を行わせる、請求項1に記載の自動走行方法。
【請求項3】
前記旋回走行中に前記オペレータからの戻り指示を受け付けて、前記作業車両に自動で前記旋回走行の開始位置に戻る戻り走行を行わせることを実行する、請求項1に記載の自動走行方法。
【請求項4】
前記作業車両に自動走行を行わせる走行経路を設定することを実行し、
前記走行経路は、並んで配置される複数の経路を含み、
前記旋回走行は、前記複数の経路に対して設定されたスキップ数に基づいて行われる、請求項1に記載の自動走行方法。
【請求項5】
前記旋回走行は、前記スキップ数に基づいて選択された旋回パターンで行われる、請求項4に記載の自動走行方法。
【請求項6】
前記所定操作を受け付けた後に、前記作業車両が有する作業機を自動で非作業状態に切り替えることを実行する、請求項1に記載の自動走行方法。
【請求項7】
前記旋回走行の終了後に、前記作業機を自動で作業状態に切り替えることを実行する、請求項6に記載の自動走行方法。
【請求項8】
作業車両と、
前記作業車両の自動走行に関わる設定を可能に設けられる操作装置と、
前記操作装置からの指示に応じて前記作業車両の自動走行を制御する制御装置と、
を備え、
前記制御装置は、前記操作装置における方向指示を含む所定操作を受け付けると、前記作業車両に前記方向指示で指定された方向へ自動で旋回走行を行わせる、自動走行システム。
【請求項9】
前記作業車両の状態を知らせる音を出力する音出力部と、
前記作業車両に搭載され、前記音出力部と連動して発光を行うライトと、
をさらに備える、請求項8に記載の自動走行システム。
【請求項10】
前記作業車両に搭載され、入力操作可能に設けられる表示装置をさらに備え、
前記表示装置は、非操作状態である場合において、前記作業車両の状態を表示する画面表示に切り替わる、請求項8に記載の自動走行システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動走行方法、自動走行システム、および、プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、圃場で作業車両を自律走行させる自律走行システムが知られる(例えば特許文献1参照)。特許文献1には、オペレータによる前進指示があったことを条件として、作業車両に作業を実施させずに、少なくとも操舵を自律的に行って、予め指定された直線経路に向かって作業車両を旋回させることが開示される。
【先行技術文献】
【特許文献】
【0003】
特開2020-137463号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される技術では、前進指示に応じて自動的に次の経路を判断して旋回方向が決められる。このような構成の場合、自動で動く作業車両が次にどちらの方向に向かって旋回する設定となっているかが分からず、オペレータが不安に感じる虞がある。不安が生じた結果、不必要な停車等を行い、作業効率の低下を招く可能性がある。
【0005】
本発明は、上記の点に鑑み、自動走行を行う作業車両を用いて効率良く作業を行うことができる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の例示的な自動走行方法は、作業車両の自動走行方法であって、オペレータによる方向指示を含む所定操作を受け付けると、前記作業車両に前記方向指示で指定された方向へ自動で旋回走行を行わせることを実行する。
【0007】
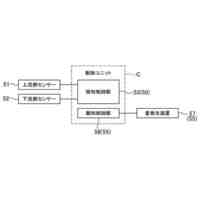
本発明の例示的な自動走行システムは、作業車両と、前記作業車両の自動走行に関わる設定を行う操作装置と、前記操作装置からの指示に応じて前記作業車両の自動走行を制御する制御装置と、を備え、前記制御装置は、前記操作装置における方向指示を含む所定操作を受け付けると、前記作業車両に前記方向指示で指定された方向へ自動で旋回走行を行わせる。
【0008】
本発明の例示的なプログラムは、作業車両の自動走行方法をコンピュータに実行させるプログラムであって、前記コンピュータを、オペレータによる方向指示を含む所定操作を受け付けると、前記作業車両に前記方向指示で指定された方向へ自動で旋回走行を行わせることを行う手段として機能させる。
【発明の効果】
【0009】
例示的な本発明によれば、自動走行を行う作業車両を用いて効率良く作業を行うことができる。
【図面の簡単な説明】
【0010】
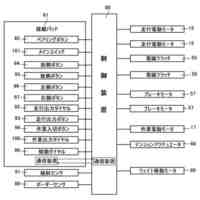
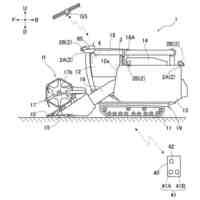
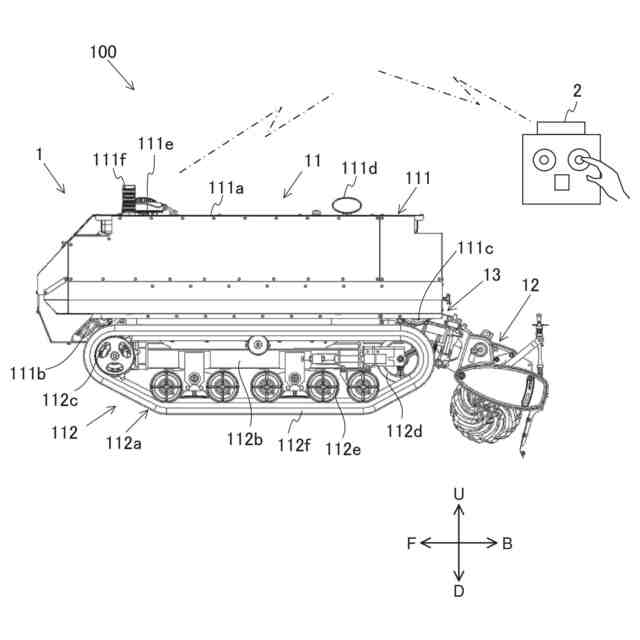
自動走行システムの概略の構成を示す図
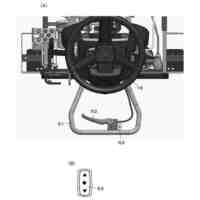
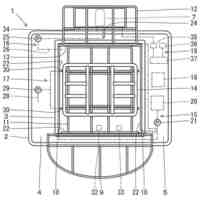
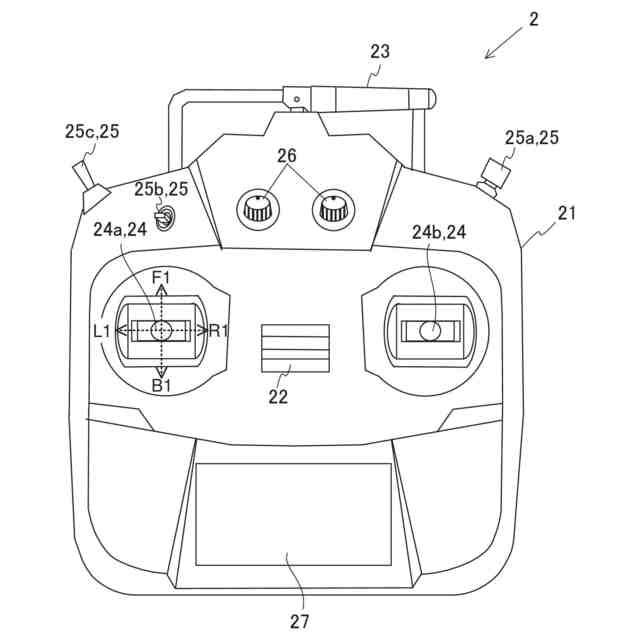
操作装置の概略の構成を示す平面図
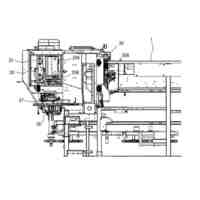
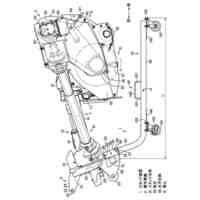
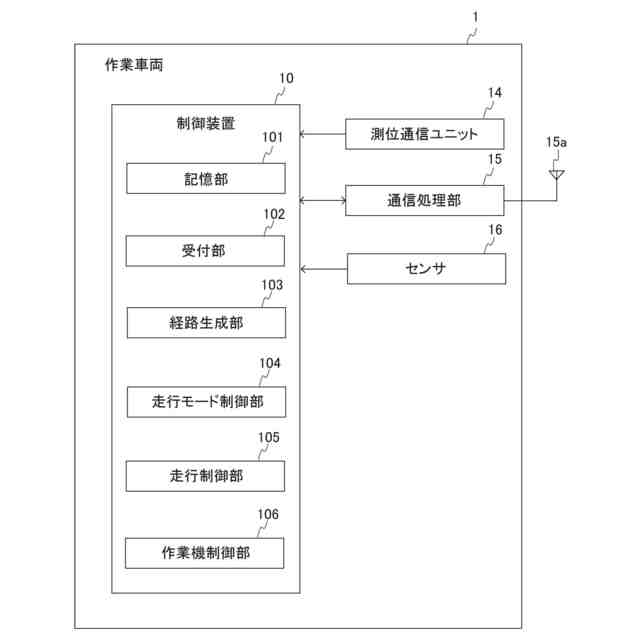
作業車両の概略の構成を示すブロック図
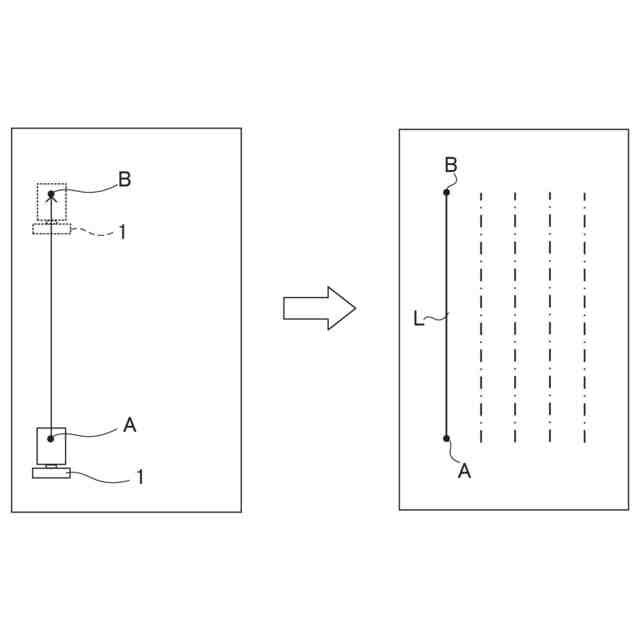
基準線の設定方法の一例を説明するための図
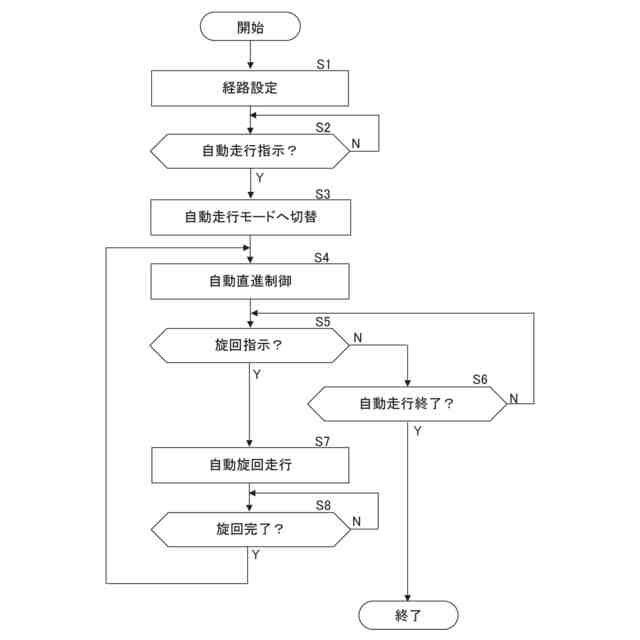
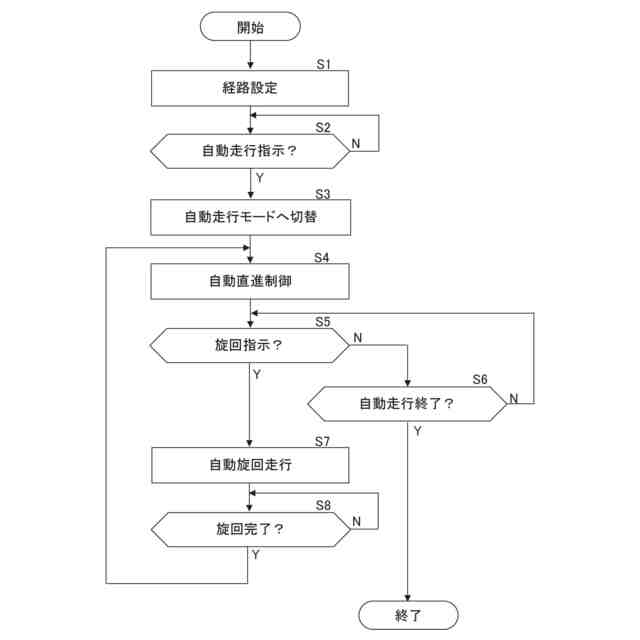
自動走行方法の流れを例示するフローチャート
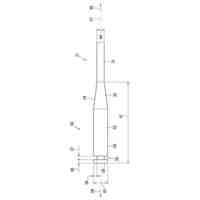
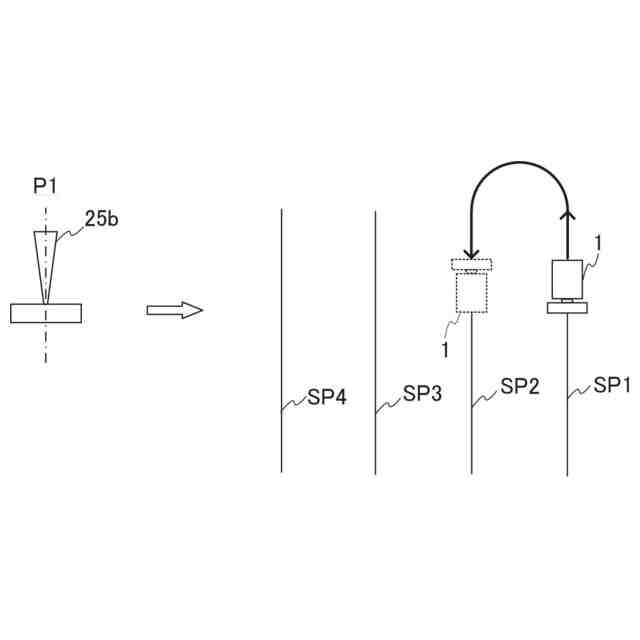
第2操作スイッチの機能を説明するための図
第2操作スイッチの機能を説明するための図
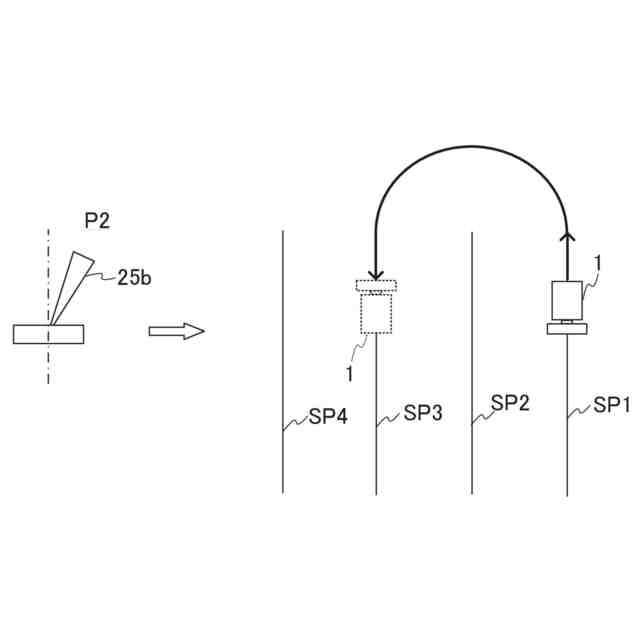
第2操作スイッチの機能を説明するための図
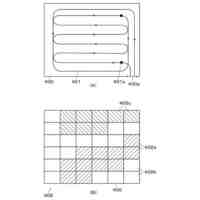
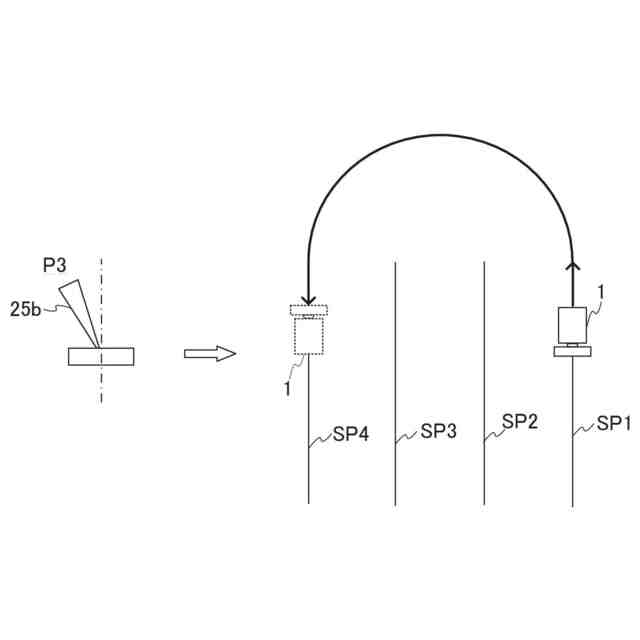
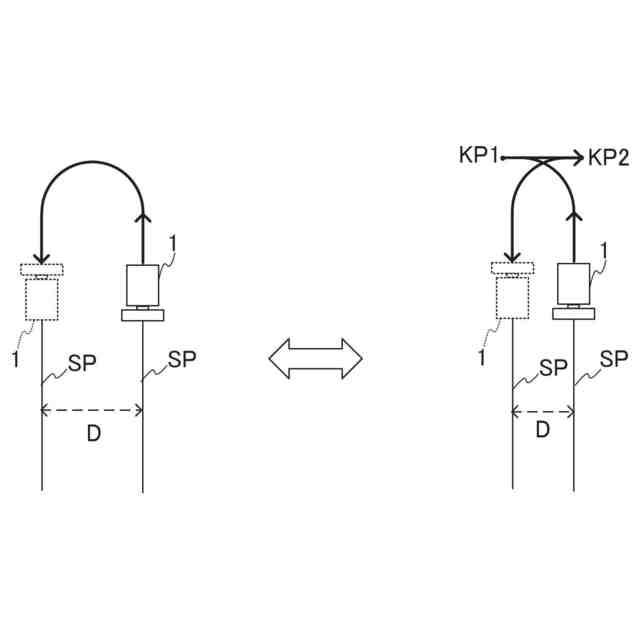
旋回パターンについて説明するための図
旋回パターンについて説明するための他の図
変形例に係る自動走行方法の流れを例示するフローチャート
自動旋回走行の旋回パターンに付加可能なオプショナルモードについて説明するための図
自動反転ターンと自動シフトターンとのいずれを利用するかを選択可能とする設定部の構成例を示す模式図
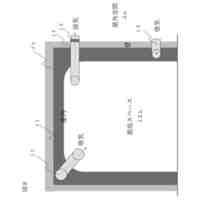
次の作業経路へ移動する自動走行(自動シフトターン)の具体例を示す模式図
次の作業経路へ移動する自動走行(自動シフトターン)の他の具体例を示す模式図
発光を用いた報知動作について説明するための図
第6変形例にかかる作業車両の概略の構成を示す図
作業車両における音に関する設定を行う設定画面を例示する図
ブザーモードによる作業車両の状態の報知例を示す図
ブザーモードによる作業車両の状態の報知例を示す図
音声モードによる作業車両の状態の報知例を示す図
音声モードによる作業車両の状態の報知例を示す図
フィッシュテールターン時の作業車両の状態および動作とオペレータの操作との関係を説明するための図
作業車両が行う音声案内の例を示す図
作業車両が行う音声案内の例を示す図
作業車両が行う音声案内の例を示す図
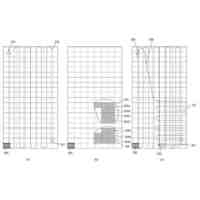
自動走行システムが備える表示装置の表示画面に表示される画面例を示す図
非操作状態である場合における表示装置の第1画面例を示す図
非操作状態である場合における表示装置の第2画面例を示す図
非操作状態である場合における表示装置の第3画面例を示す図
非操作状態である場合における表示装置の第4画面例を示す図
非操作状態である場合における表示装置の第5画面例を示す図
非操作状態である場合における表示装置の第6画面例を示す図
非操作状態である場合における表示装置の第7画面例を示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釣り用ルアー
今日
個人
釣り用ルアー
今日
個人
播種機
13日前
井関農機株式会社
作業車両
1日前
有限会社マイク
囲い罠
6日前
井関農機株式会社
圃場作業機
2日前
井関農機株式会社
コンバイン
6日前
株式会社シマノ
釣り具
6日前
個人
室内栽培システム
9日前
井関農機株式会社
圃場管理装置
14日前
井関農機株式会社
歩行型管理機
今日
井関農機株式会社
移植機
13日前
井関農機株式会社
圃場管理装置
20日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
13日前
株式会社シマノ
釣竿
1日前
株式会社ダイイチ
海苔網の酸処理船
9日前
株式会社山田鉄工
海苔網処理船
9日前
株式会社村岡水産
釣り用ワーム
今日
株式会社山田鉄工
海苔網処理船
9日前
株式会社山田鉄工
海苔網処理船
9日前
鹿島建設株式会社
エビ類育成漁礁
1日前
松山株式会社
スタンド装置
13日前
井関農機株式会社
水田引水管理システム
今日
大栄工業株式会社
誘引剤収容容器
7日前
株式会社クボタ
田植機
13日前
株式会社クボタ
収穫機
1日前
株式会社クボタ
移植機
2日前
株式会社クボタ
移植機
13日前
株式会社クボタ
収穫機
6日前
株式会社クボタ
移植機
2日前
株式会社クボタ
作業車
13日前
有限会社マドネスジャパン
ポッパー
今日
株式会社シマノ
釣糸ガイド及び釣竿
8日前
株式会社ドクター中松創研
農薬用ウクルマ
8日前
井関農機株式会社
水田管理システム
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ