TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025096128
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2024144225
出願日
2024-08-26
発明の名称
位置決め調整機構、位置決め調整システム、及び充電ステーション
出願人
株式会社リコー
代理人
弁理士法人ITOH
主分類
G05D
1/24 20240101AFI20250619BHJP(制御;調整)
要約
【課題】走行装置の位置決め精度を向上する。
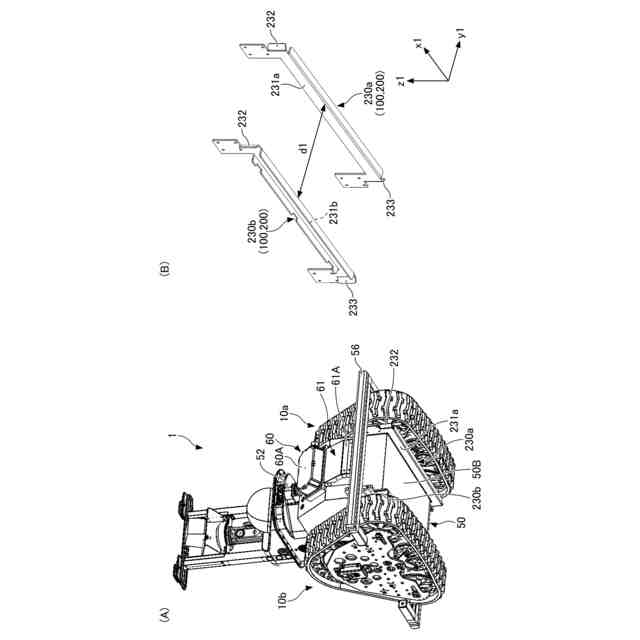
【解決手段】位置決め調整機構200は、本体50の両側に、走行面Gと接地して駆動する一対の履帯式走行体10a、10bを有する走行装置1を所定の停止位置P4に位置決めする。位置決め調整機構200は、走行装置1の走行面G上に立設されるガイドレール210と、ガイドレール210に対して、走行装置1の幅方向の両側に対向配置される一対のガイドパッド230a、230bと、を備える。一対のガイドパッド230a、230bのそれぞれは、走行装置1の本体50の底面50B側のうち、本体50の幅方向の中心位置を挟んだ両側に配置され、かつ、配置されたガイドパッド230a、230bと配置される側の履帯式走行体10a、10bの間の距離が、配置されたガイドパッド230a、230bと中心位置の間の距離より小さくなるように幅方向の位置に配置される。
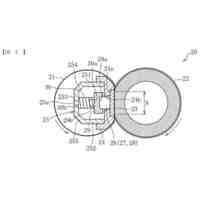
【選択図】図6
特許請求の範囲
【請求項1】
本体の両側に、走行面と接地して駆動する一対の走行体を有する走行装置を所定の停止位置に位置決めするための位置決め調整機構であって、
前記走行装置の走行面上に立設されるガイドレールと、
前記ガイドレールに対して、前記走行装置の進行方向と直交する幅方向の両側に対向配置される少なくとも一対のガイドパッドと、
を備え、
前記少なくとも一対のガイドパッドのうち第1の一対のガイドパッドは、前記本体の底面側、かつ、前記一対の走行体のそれぞれの前記本体側の位置にて、前記停止位置に最も近い前記本体の前端部側から、前記本体の前記進行方向に沿った少なくとも一部に延在するよう配置され、
前記少なくとも一対のガイドパッドの各対のそれぞれは、前記本体の前記幅方向の中心位置を挟んだ両側に配置され、かつ、配置された前記ガイドパッドと配置される側の前記走行体の間の距離が、配置された前記ガイドパッドと前記中心位置の間の距離より小さくなるように前記幅方向の位置に配置され、
前記ガイドレールは、
前記幅方向の寸法が、前記走行装置の前記進行方向に沿って徐々に前記少なくとも一対のガイドパッドの間の距離に接近するよう拡幅する拡幅部と、
前記拡幅部のうち前記幅方向の寸法が最大となる方の端部と一方の端部が連結され、前記幅方向の両端が前記進行方向に沿って平行となるよう形成され、他方の端部が前記停止位置まで延在する位置決め部と、を有する、
位置決め調整機構。
続きを表示(約 990 文字)
【請求項2】
前記ガイドレールは、
前記拡幅部のうち前記幅方向の寸法が最小となる方の端部と連結され、前記幅方向の両端が前記進行方向に沿って平行となるよう形成され、前記少なくとも一対のガイドパッドの間に挿入されて前記走行装置を前記拡幅部まで誘導する誘導部を有する、
請求項1に記載の位置決め調整機構。
【請求項3】
前記ガイドレールは、
前記誘導部の先端部分の上方角部に先端側の高さが低くなるように形成され、前記走行装置の前記本体の底面を掬い上げる掬い上げ部を有する、請求項2に記載の位置決め調整機構。
【請求項4】
前記走行装置が前記停止位置に到達したときに、前記一対の走行体の後端側部分と接触する車止めを備える、
請求項1に記載の位置決め調整機構。
【請求項5】
前記第1の一対のガイドパッドは、
前記本体の前記前端部の側の端部に、前記ガイドレールとの接触抵抗を軽減する緩衝部を有する、
請求項1に記載の位置決め調整機構。
【請求項6】
前記少なくとも一対のガイドパッドは前記第1の一対のガイドパッドのみを有し、
前記第1の一対のガイドパッドは前記本体の前記前端部から前記本体の前記進行方向に沿った全体に亘って延在して設けられ、前記本体の後端側の端部にも前記緩衝部を有する、
請求項5に記載の位置決め調整機構。
【請求項7】
前記ガイドレールの前記誘導部は、直線部分とカーブ部分とを有し、
前記直線部分と前記カーブ部分とが連結されて形成される、
請求項2に記載の位置決め調整機構。
【請求項8】
前記ガイドレールの前記誘導部は、延在方向の異なる複数の直線部分を有し、
前記複数の直線部分が離間して形成される、
請求項2に記載の位置決め調整機構。
【請求項9】
前記走行装置は、前記一対の走行体のそれぞれに速度差を付けることによって前記進行方向を変更するよう構成される、
請求項1に記載の位置決め調整機構。
【請求項10】
前記一対の走行体が、履帯式走行体である、
請求項9に記載の位置決め調整機構。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置決め調整機構、位置決め調整システム、及び充電ステーションに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、様々な使用環境や用途において、従来の人手で行われていた作業の支援や人が対応できない環境での作業を行うための自律移動型のロボット(走行装置)が活用されている。
【0003】
例えば特許文献1には、このような自律移動型の走行装置の一例として、走行時の安定性を高めるため、履帯式(クローラ式)の走行体を備えた走行装置が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1には、目標位置により正確に停止するための機構が記載されておらず、改善の余地がある。
【0005】
本発明は、走行装置の位置決め精度を向上することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決するために、本発明の一観点に係る位置決め調整機構は、本体の両側に、走行面と接地して駆動する一対の走行体を有する走行装置を所定の停止位置に位置決めするための位置決め調整機構であって、前記走行装置の走行面上に立設されるガイドレールと、前記ガイドレールに対して、前記走行装置の進行方向と直交する幅方向の両側に対向配置される少なくとも一対のガイドパッドと、を備え、前記少なくとも一対のガイドパッドのうち第1の一対のガイドパッドは、前記本体の底面側、かつ、前記一対の走行体のそれぞれの前記本体側の位置にて、前記停止位置に最も近い前記本体の前端部側から、前記本体の前記進行方向に沿った少なくとも一部に延在するよう配置され、前記少なくとも一対のガイドパッドの各対のそれぞれは、前記本体の前記幅方向の中心位置を挟んだ両側に配置され、かつ、配置された前記ガイドパッドと配置される側の前記走行体の間の距離が、配置された前記ガイドパッドと前記中心位置の間の距離より小さくなるように前記幅方向の位置に配置され、前記ガイドレールは、前記幅方向の寸法が、前記走行装置の前記進行方向に沿って徐々に前記少なくとも一対のガイドパッドの間の距離に接近するよう拡幅する拡幅部と、前記拡幅部のうち前記幅方向の寸法が最大となる方の端部と一方の端部が連結され、前記幅方向の両端が前記進行方向に沿って平行となるよう形成され、他方の端部が前記停止位置まで延在する位置決め部と、を有する。
【発明の効果】
【0007】
走行装置の位置決め精度を向上することができる。
【図面の簡単な説明】
【0008】
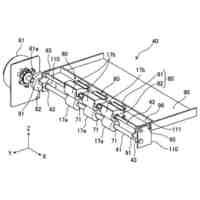
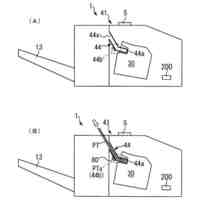
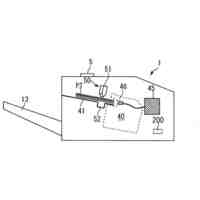
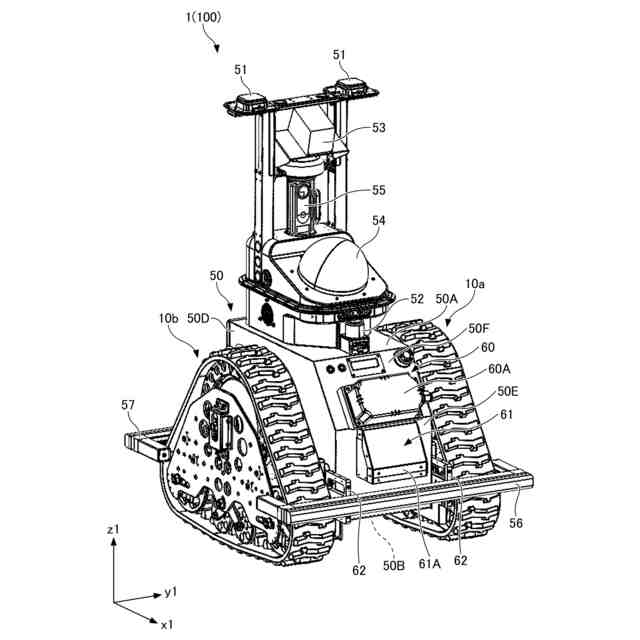
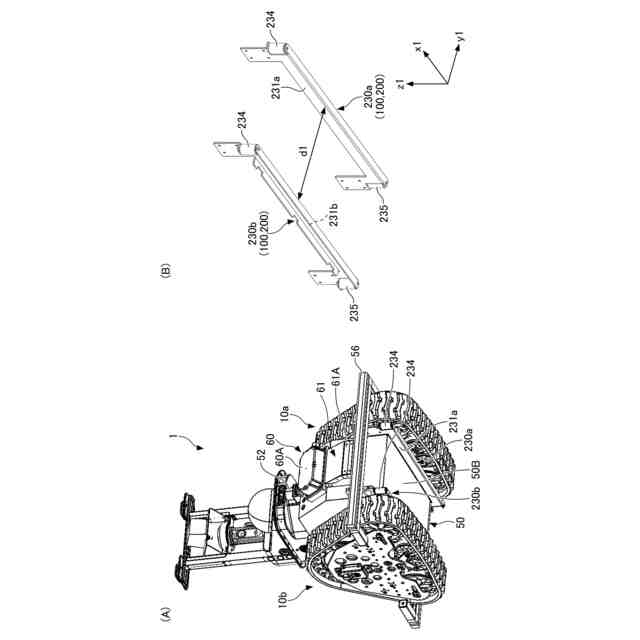
実施形態で適用される走行装置の概略構成を示す斜視図
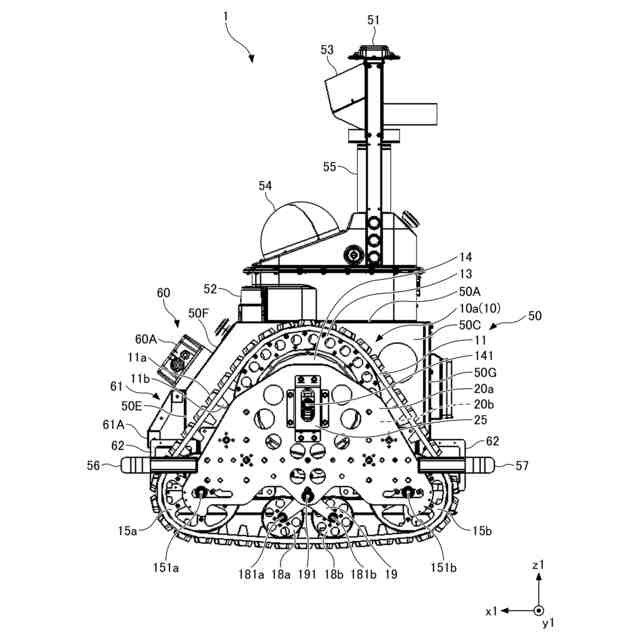
図1に示す走行装置の側面図
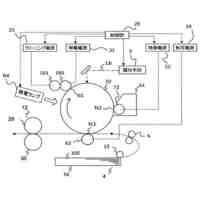
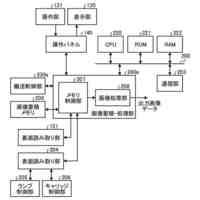
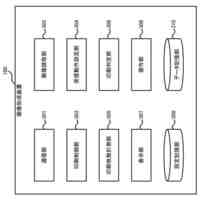
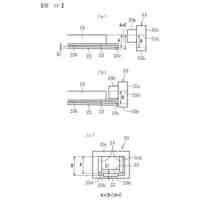
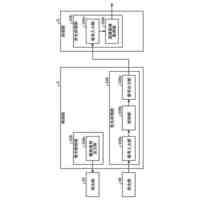
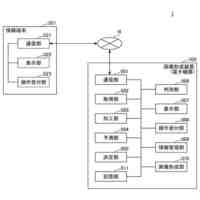
走行装置のハードウェア構成の一例を示す図
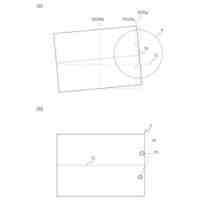
充電タスクの適用パターンを示す模式図
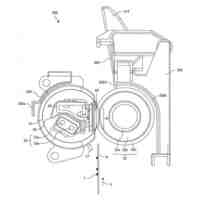
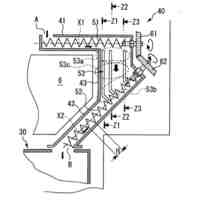
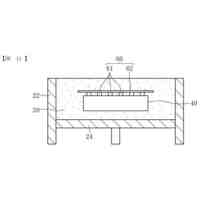
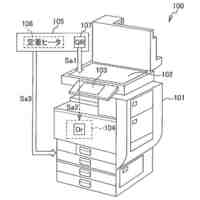
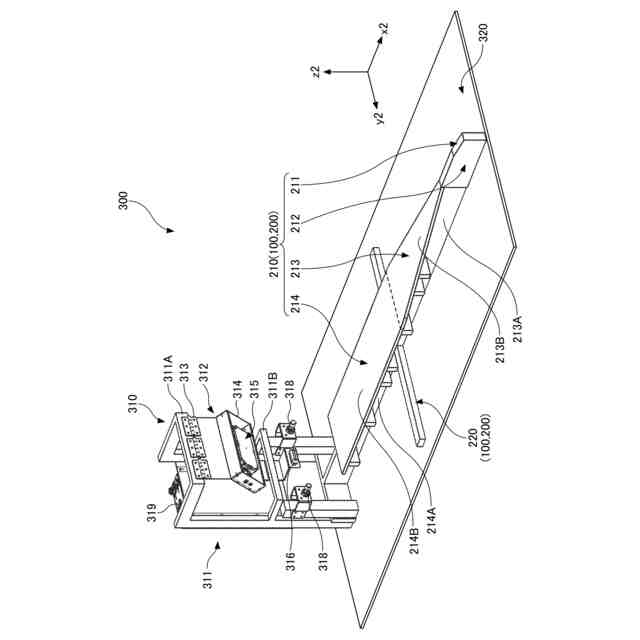
実施形態に係る充電ステーションの概略構成を示す斜視図
ガイドパッドの一例を示す図
ガイドパッドの他の例を示す図
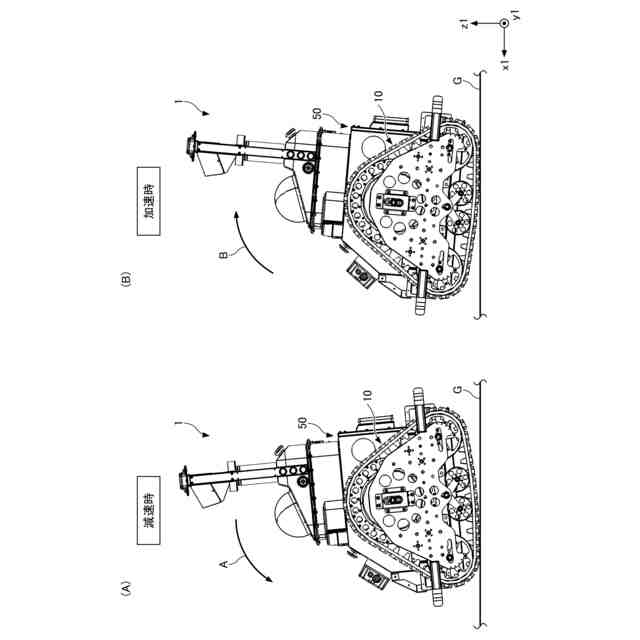
走行装置の前進時の姿勢の一例を示す側面図
ガイドレールの掬い上げ部の機能を説明する側面図
ガイドレールの誘導部の機能を説明する平面図
ガイドレールの拡幅部の機能を説明する平面図
ガイドレールの位置決め部と車止めの機能を説明する平面図
走行装置が給電ステーションの充電可能位置に到達した状態の側面図
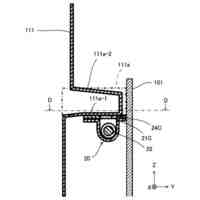
ガイドレールの各部の断面形状を示す図
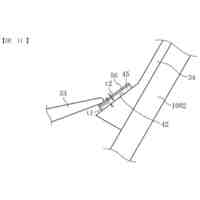
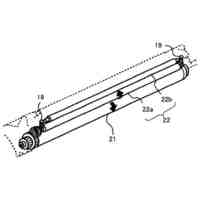
給電スタンドの回動部を拡大視した斜視図
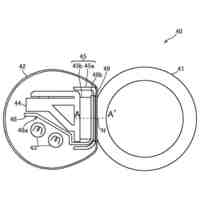
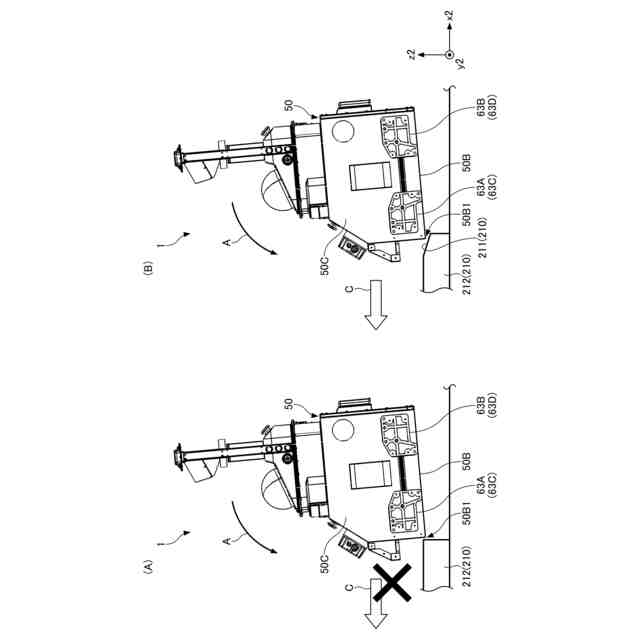
走行装置が充電可能位置に到達するときの給電スタンドの動作を説明する図
充電可能位置における履帯式走行体と車止めとの位置関係を示す図
充電制御において充電ルートに進入する動作を説明する模式図
充電ルート進入時の各段階の制御を説明する模式図
接続準備位置における方向制御を説明する平面図
接続準備位置における方向制御の別例を示す平面図
充電可能位置において充電中の動作を説明する模式図
充電中の制御を説明する模式図
充電制御において充電ルートから退出する動作を説明する模式図
充電ルート退出時の各段階の制御を説明する模式図
充電ステーションの構成の変形例を示す図
充電ステーションの構成の他の変形例を示す図
充電ステーションの構成のさらなる他の変形例を示す図
充電ステーションの設置位置の変形例を示す図
誘導部の第1変形例を示す図
誘導部の第2変形例を示す図
拡幅部の変形例を示す図
給電スタンドの第1変形例を示す図
給電スタンドの第2変形例を示す図
給電スタンドの第3変形例を示す図
ガイドパッドの変形例を示す斜視図
ガイドレールの変形例を示す平面図
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら実施形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
【0010】
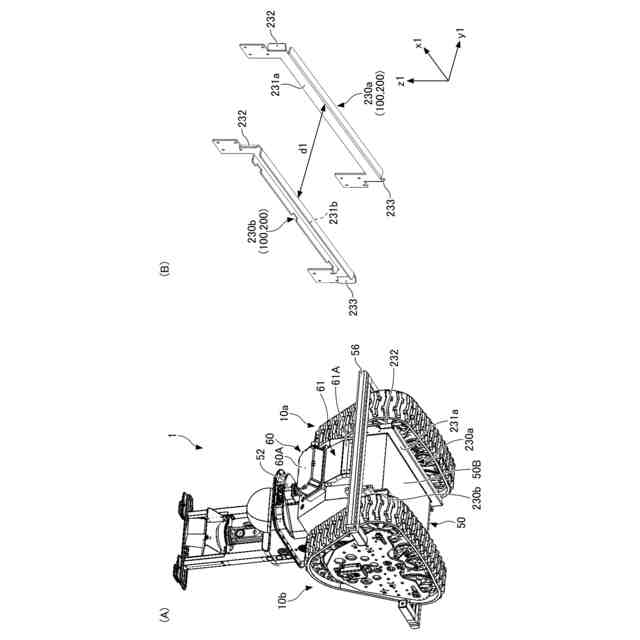
実施形態に係る位置決め調整システム100は、走行装置1を所定の停止位置に位置決めさせるためのシステムである。詳細は後述するが、位置決め調整システム100は、走行装置1と、走行装置1を所定の停止位置に位置決めするための位置決め調整機構200と、を備えるものである(図1、図5~図7参照)。同様に、詳細は後述するが、位置決め調整機構200は、ガイドレール210と、車止め220と、一対のガイドパッド230a、230bと、を備えるものである(図5~図7参照)。本実施形態では、走行装置の一例として、履帯式(クローラ式)の走行体10a、10bを備える走行装置1を例示して説明する。また、本実施形態では、走行装置1を位置決めするタスクの一例として、実施形態に係る充電ステーション300の充電可能位置P4(図13、図18など参照)に位置決めする充電タスクを例示して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
12日前
株式会社リコー
画像形成装置
13日前
株式会社リコー
多関節ロボット
18日前
株式会社リコー
システムおよび方法
14日前
株式会社リコー
定着装置及び画像形成装置
14日前
株式会社リコー
定着装置及び画像形成装置
13日前
株式会社リコー
情報処理装置、情報表示方法
21日前
株式会社リコー
画像読取装置及び画像形成装置
12日前
株式会社リコー
シート搬送装置及び画像形成装置
12日前
株式会社リコー
画像処理装置、および画像処理方法
12日前
株式会社リコー
画像形成装置、方法およびプログラム
18日前
株式会社リコー
後処理装置、及び、画像形成システム
13日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
11日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
21日前
株式会社リコー
トナー搬送装置、及び、画像形成装置
25日前
株式会社リコー
後処理装置、及び、画像形成システム
18日前
株式会社リコー
シート処理装置及び画像形成システム
26日前
株式会社リコー
造形方法、造形システム及びプログラム
20日前
株式会社リコー
圧切替機構、画像形成装置及び圧切替方法
14日前
株式会社リコー
測距システム、測距方法およびプログラム
18日前
株式会社リコー
画像処理装置、画像処理方法、プログラム
20日前
株式会社リコー
情報処理装置、開発支援システムおよびプログラム
12日前
株式会社リコー
電子機器、システム、画像形成装置、異常検出方法
14日前
株式会社リコー
読取装置、画像処理装置、読取方法およびプログラム
27日前
株式会社リコー
読取装置、画像処理装置、読取方法およびプログラム
25日前
株式会社リコー
固有表現抽出方法、固有表現抽出装置及びプログラム
4日前
株式会社リコー
情報処理装置、通信システム、情報処理方法及びプログラム
25日前
株式会社リコー
画像形成装置、画像定着装置、情報処理方法、及びプログラム
25日前
株式会社リコー
クリーニング装置、プロセスカートリッジおよび画像形成装置
18日前
株式会社リコー
伝送管理装置
4日前
株式会社リコー
情報提供システム、電子機器、情報提供方法、及びプログラム
5日前
株式会社リコー
情報処理システム、画像処理装置、情報処理方法及びプログラム
21日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
11日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法およびプログラム
18日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
11日前
株式会社リコー
位置決め調整機構、位置決め調整システム、及び充電ステーション
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ