TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092289
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023208080
出願日
2023-12-08
発明の名称
処理装置、ハンドリングシステム、処理方法、プログラム、及び記憶媒体
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
B65G
1/137 20060101AFI20250612BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】ハンドリングロボットの稼働率をより高めることが可能な、処理装置、ハンドリングシステム、処理方法、プログラム、及び記憶媒体を提供する。
【解決手段】実施形態に係る処理装置は、物品を搬送するハンドリングロボットと、搬送された前記物品を検査する検査ユニットと、を含むハンドリング装置と通信可能である。前記処理装置は、前記ハンドリング装置におけるエラーの発生を検出する。前記処理装置は、前記エラーが発生した工程と、前記エラーが発生した原因と、を判断する。前記処理装置は、前記工程の判断結果及び前記原因の判断結果を用いて、前記エラーによる前記物品の管理情報の変動を判断する。
【選択図】図3
特許請求の範囲
【請求項1】
物品を搬送するハンドリングロボットと、搬送された前記物品を検査する検査ユニットと、を含むハンドリング装置と通信可能な処理装置であって、
前記ハンドリング装置におけるエラーの発生を検出し、
前記エラーが発生した工程と、前記エラーが発生した原因と、を判断し、
前記工程の判断結果及び前記原因の判断結果を用いて、前記エラーによる前記物品の管理情報の変動を判断する、処理装置。
続きを表示(約 980 文字)
【請求項2】
前記工程の判断において、前記ハンドリングロボットによる搬送と、前記検査ユニットによる検査と、のいずれの工程で前記エラーが発生したかを判断する、請求項1に記載の処理装置。
【請求項3】
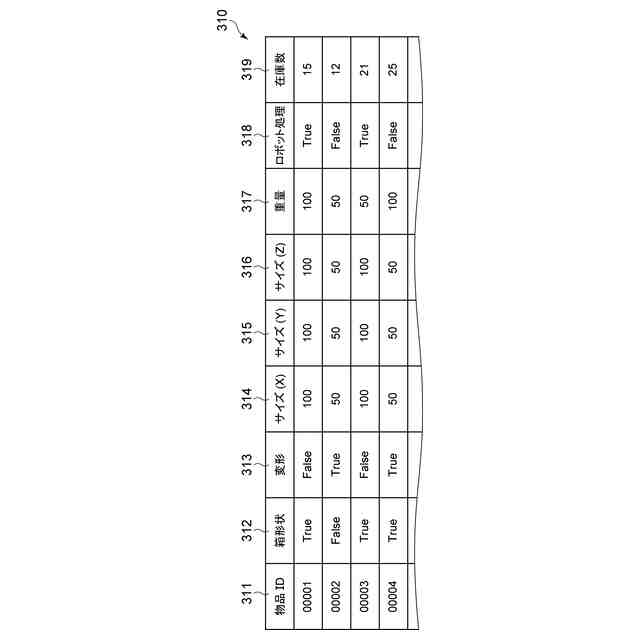
前記管理情報は、前記物品の在庫数を含む、請求項2に記載の処理装置。
【請求項4】
前記検査ユニットによる前記検査において前記エラーが発生した場合、前記物品の前記在庫数を減少させる判断結果を出力する、請求項3に記載の処理装置。
【請求項5】
前記ハンドリングロボットによる搬送において前記エラーが発生し、且つ、前記エラーの原因が前記物品の落下であると判断された場合、前記物品の前記在庫数を減少させる判断結果を出力する、請求項3に記載の処理装置。
【請求項6】
前記ハンドリングロボットによる搬送において前記エラーが発生した場合に、前記ハンドリングロボットによって前記物品が把持されているかを判断し、
前記ハンドリングロボットによって前記物品が把持されていると判断された場合、前記物品の前記在庫数を減少させる判断結果を出力する、請求項3に記載の処理装置。
【請求項7】
前記ハンドリングロボットによる搬送において前記エラーが発生し、且つ、前記エラーの原因が前記ハンドリングロボットによる前記物品の把持前に関するものである場合、前記物品の前記在庫数を変動させない判断結果を出力する請求項3に記載の処理装置。
【請求項8】
前記ハンドリングロボットによる搬送において前記エラーが発生した場合に、前記ハンドリングロボットの遠隔操作の必要性を判断し、
前記遠隔操作が必要と判断された場合に、通知を発する、請求項1に記載の処理装置。
【請求項9】
請求項1~8のいずれか1つに記載の処理装置と、
前記ハンドリング装置と、ハンドリングシステム。
【請求項10】
前記処理装置と通信可能な管理装置をさらに備え、
前記処理装置は、前記物品の搬送の成功又は失敗を示す搬送結果と、前記物品の前記管理情報の変動の判断結果と、を前記管理装置へ送信する、請求項9に記載のハンドリングシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、処理装置、ハンドリングシステム、処理方法、プログラム、及び記憶媒体に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
倉庫などで、物品を自動的に搬送可能なハンドリングロボットが用いられている。ハンドリングロボットを用いた搬送処理について、ハンドリングロボットの稼働率をより高めることができる技術が求められている。
【先行技術文献】
【特許文献】
【0003】
特許第7364534号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、ハンドリングロボットの稼働率をより高めることが可能な、処理装置、ハンドリングシステム、処理方法、プログラム、及び記憶媒体を提供することである。
【課題を解決するための手段】
【0005】
実施形態に係る処理装置は、物品を搬送するハンドリングロボットと、搬送された前記物品を検査する検査ユニットと、を含むハンドリング装置と通信可能である。前記処理装置は、前記ハンドリング装置におけるエラーの発生を検出する。前記処理装置は、前記エラーが発生した工程と、前記エラーが発生した原因と、を判断する。前記処理装置は、前記工程の判断結果及び前記原因の判断結果を用いて、前記エラーによる前記物品の管理情報の変動を判断する。
【図面の簡単な説明】
【0006】
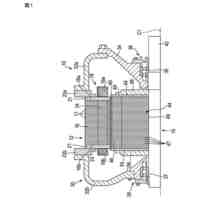
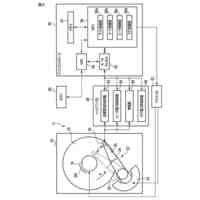
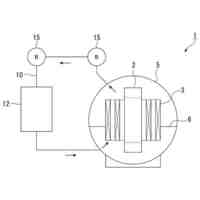
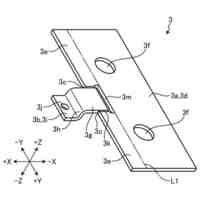
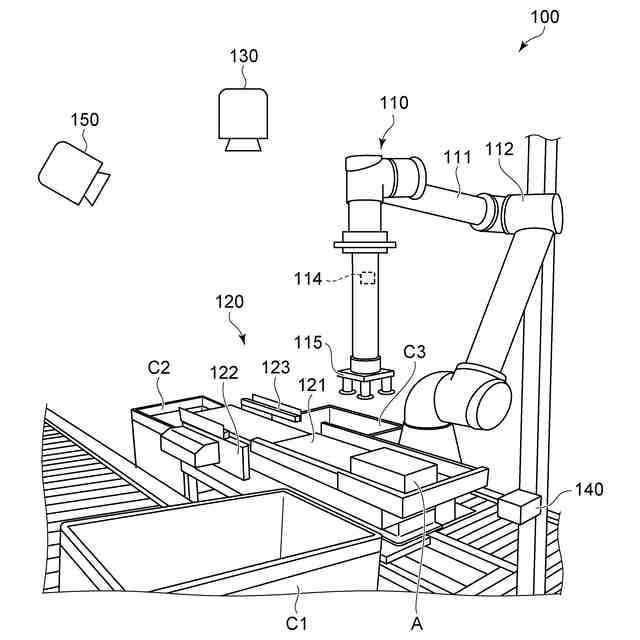
図1は、実施形態に係るハンドリング装置を示す斜視図である。
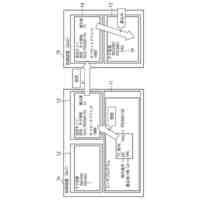
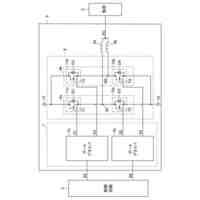
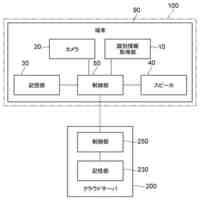
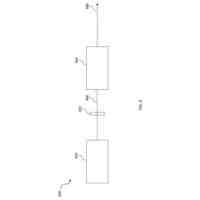
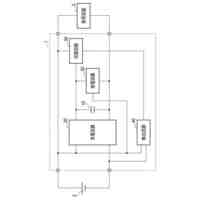
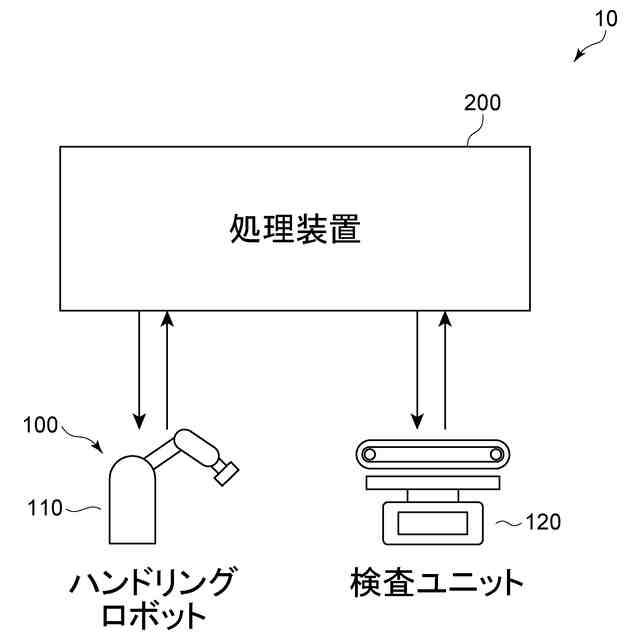
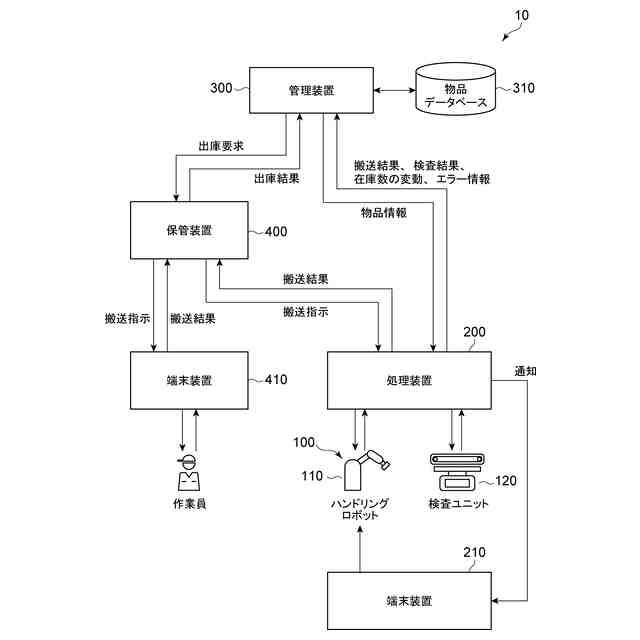
図2は、実施形態に係るハンドリングシステムの構成例を示す模式図である。
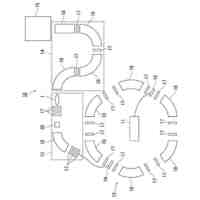
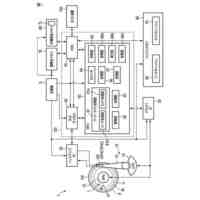
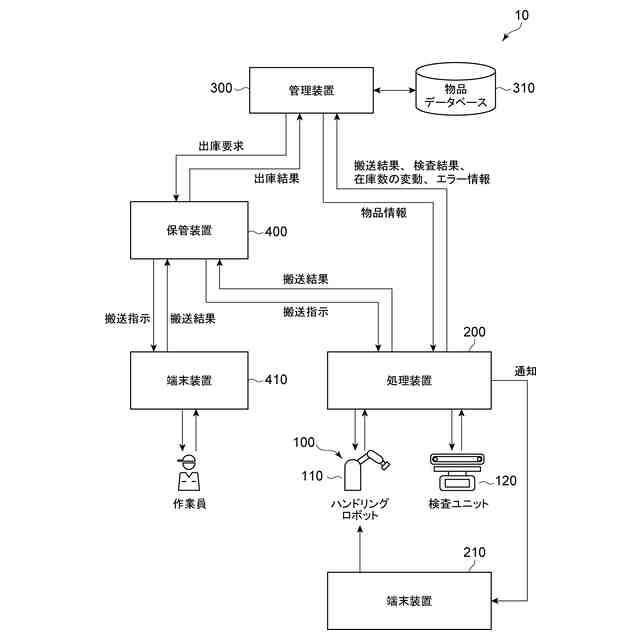
図3は、実施形態に係るハンドリングシステムの具体的な構成例を示す模式図である。
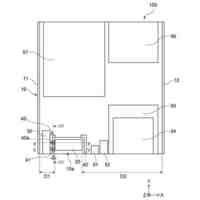
図4は、物品データベースの一例を示すテーブルである。
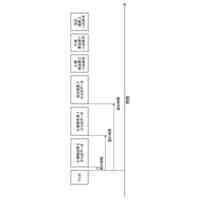
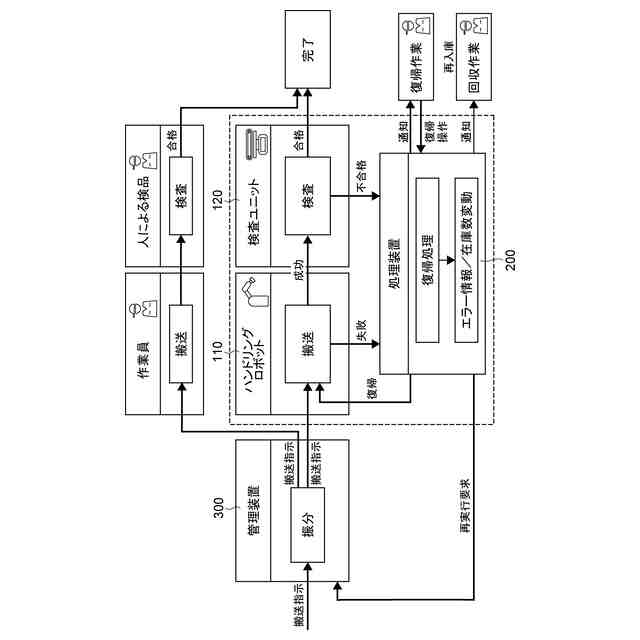
図5は、実施形態に係るハンドリングシステムの全体的な処理の流れを示す模式図である。
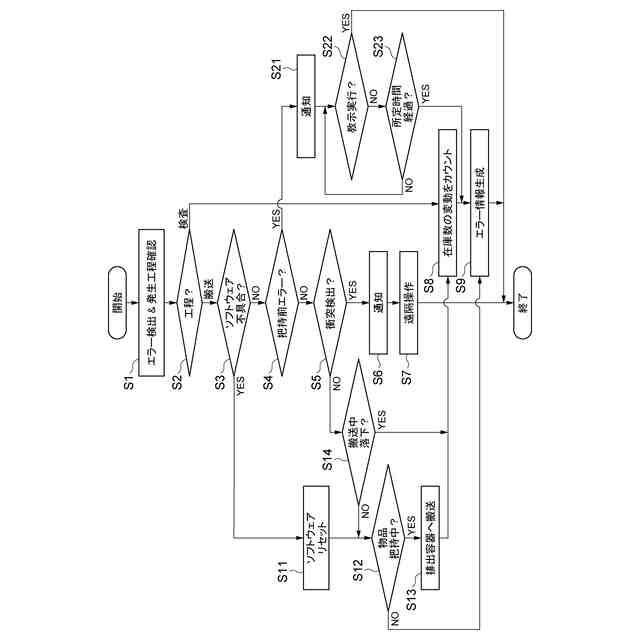
図6は、エラーの発生時における復帰処理を示すフローチャートである。
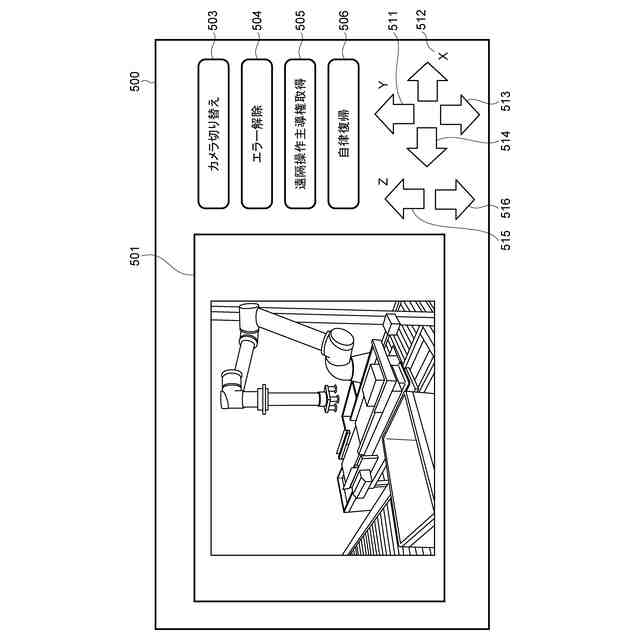
図7は、遠隔操作時のグラフィカルユーザインターフェースを示す模式図である。
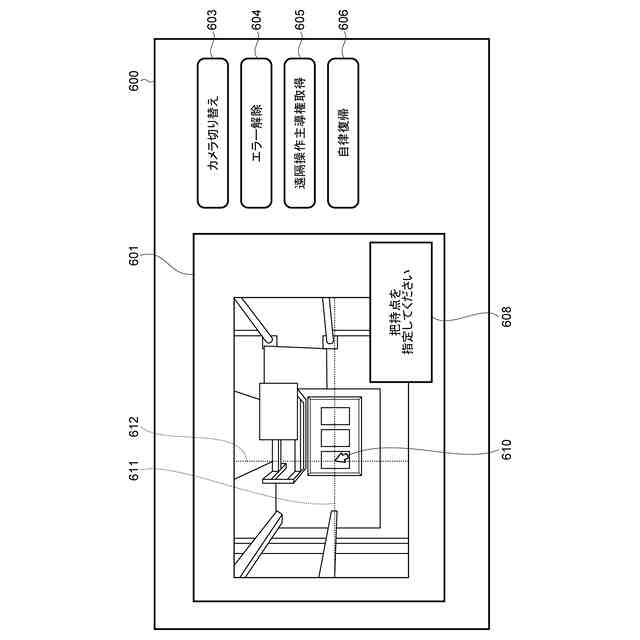
図8は、遠隔操作時のグラフィカルユーザインターフェースを示す模式図である。
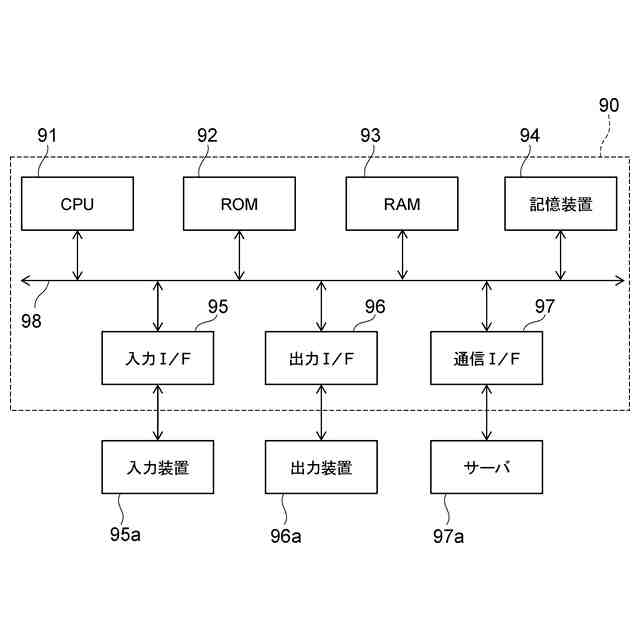
図9は、ハードウェア構成を示す模式図である。
【発明を実施するための形態】
【0007】
以下に、本発明の各実施形態について図面を参照しつつ説明する。図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。本願明細書と各図において、既に説明したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
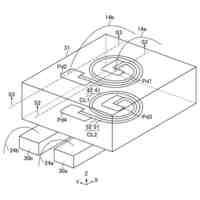
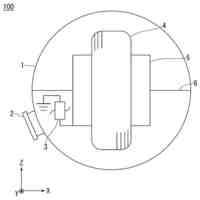
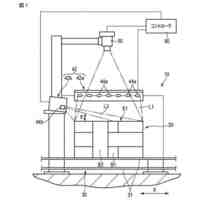
図1は、実施形態に係るハンドリング装置を示す斜視図である。
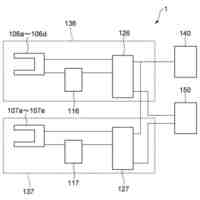
図1に示すように、実施形態に係るハンドリング装置100は、ハンドリングロボット110、検査ユニット120、第1測定器130、第2測定器140、及び撮影装置150を含む。
【0009】
ハンドリングロボット110は、物品を把持するための把持部115を含み、把持部115を用いて物品を搬送する。把持部115は、吸着又は挟持などにより、物品を把持する。例えば、ハンドリングロボット110は、ピッキング作業を実行するピッキングロボットである。
【0010】
図示した例では、ハンドリングロボット110は、垂直多関節ロボットであり、吸着により物品を把持する。ハンドリングロボット110は、複数のリンク111及び複数の回転軸112を含む。リンク111同士は、回転軸112によって連結されている。把持部115は、ハンドリングロボット110の先端に取り付けられる。各回転軸112が動作することで、ハンドリングロボット110の先端の位置及び角度が変化する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
1か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
立て看板
25日前
株式会社東芝
回転電機
2か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
回転電機
5日前
株式会社東芝
制御装置
27日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
アイソレータ
12日前
株式会社東芝
電力変換装置
2か月前
株式会社東芝
区分システム
1か月前
株式会社東芝
情報表示装置
2か月前
株式会社東芝
スイッチギヤ
20日前
株式会社東芝
ディスク装置
24日前
株式会社東芝
配線支援装置
2か月前
株式会社東芝
静止誘導電器
1か月前
株式会社東芝
静止誘導電器
1か月前
株式会社東芝
スイッチギヤ
1か月前
株式会社東芝
車両システム
1か月前
株式会社東芝
光注入同期装置
2か月前
株式会社東芝
電子計算機装置
2か月前
株式会社東芝
粒子線治療装置
1か月前
株式会社東芝
電池モジュール
1か月前
株式会社東芝
紙葉類処理装置
11日前
株式会社東芝
X線厚み測定装置
1か月前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
バックアップ回路
11日前
株式会社東芝
物品区分システム
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ