TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090676
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2025035988,2023190044
出願日
2025-03-07,2019-03-22
発明の名称
推定装置、制御方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G01S
17/875 20200101AFI20250610BHJP(測定;試験)
要約
【課題】対象物に対する距離を計測する計測部の移動体に対する姿勢を好適に推定可能な推定装置を提供する。
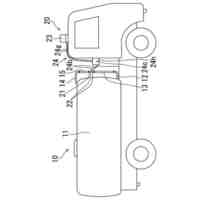
【解決手段】車載機1は、対象物に対する距離を計測するライダ2の車両に対する姿勢を少なくとも推定するものであって、車両が加減速して走行しているときの、ライダ2に設けられたライダ用加速度センサ5の検出結果に基づいて、車両に対するライダ2の姿勢を推定する処理などを行う。
【選択図】図12
特許請求の範囲
【請求項1】
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置であって、
前記移動体が所定速度により走行または停止しているときの、前記計測部に設けられた加速度検出部が出力する加速度データに基づいて、前記計測部のロール方向及びピッチ方向の姿勢を推定する推定部を有する推定装置。
続きを表示(約 1,200 文字)
【請求項2】
前記推定部は、前記移動体が加減速して走行しているときの前記加速度検出部が出力する加速度データ並びに前記推定されたロール方向及びピッチ方向の姿勢に基づいて、前記計測部のヨー方向の姿勢を推定する請求項1に記載の推定装置。
【請求項3】
前記推定部は、推定した前記計測部の姿勢と、記憶部に記憶された前記計測部の姿勢とに基づき、前記姿勢の変化量を推定する請求項1または2に記載の推定装置。
【請求項4】
前記推定部は、高さ方向における路面の位置を示す前記計測部の計測データに基づいて、前記計測部の前記高さ方向の位置を推定する請求項1~3のいずれか一項に記載の推定装置。
【請求項5】
前記推定部は、推定した前記計測部の位置と、記憶部に記憶された前記計測部の位置とに基づき、前記位置の変化量を推定する請求項4に記載の推定装置。
【請求項6】
前記変化量に基づき、前記計測部が出力する計測データを補正する補正部をさらに備える請求項3または5に記載の推定装置。
【請求項7】
前記変化量が所定量以上である場合、前記計測部が出力する計測データに基づく処理を停止する停止制御部をさらに備える請求項3または5に記載の推定装置。
【請求項8】
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置であって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定部
を有し、
前記推定部は、勾配が変化する道路地点、あるいは路面上のバンプが前記計測部により計測されたときの前記道路地点と前記移動体との距離に基づいて、前記移動体の前後方向における前記計測部の位置を推定する推定装置。
【請求項9】
前記推定部は、前記移動体のピッチ方向の傾きを検出する傾き検出部が出力するデータの変化と、前記計測部が出力する計測データの変化との時間差に基づき、前記距離を算出する請求項8に記載の推定装置。
【請求項10】
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置であって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定部
を有し、
前記推定部は、前記移動体の旋回中において前記加速度検出部が出力する前記移動体の左右方向の加速度データと、前記移動体に搭載された加速度センサが出力する前記移動体の左右方向の加速度データと、前記移動体に搭載されたジャイロセンサが出力する前記移動体のヨーレートとに基づいて、前記移動体の左右方向における前記計測部の位置を推定する推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測部の姿勢を推定する技術に関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
従来から、レーダやカメラなどの計測部の計測データに基づいて、自車位置推定などを行う技術が知られている。例えば、特許文献1には、計測センサの出力と、予め地図上に登録された地物の位置情報とを照合させることで自己位置を推定する技術が開示されている。また、特許文献2には、カルマンフィルタを用いた自車位置推定技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-257742号公報
特開2017-72422号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
レーダやカメラなどの計測部から得られるデータは、計測部を基準とした座標系の値であり、車両に対する計測部の姿勢等に依存したデータとなっているため、車両を基準とした座標系の値に変換する必要がある。従って、計測部の姿勢にずれが生じた場合には、そのずれを的確に検知して計測部のデータに反映させる必要がある。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、対象物に対する距離を計測する計測部の移動体に対する姿勢を好適に推定可能な推定装置を提供することを主な目的とする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置であって、
前記移動体が所定速度により走行または停止しているときの、前記計測部に設けられた加速度検出部が出力する加速度データに基づいて、前記計測部のロール方向及びピッチ方向の姿勢を推定する推定部を有する。
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置であって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定部
を有し、
前記推定部は、勾配が変化する道路地点、あるいは路面上のバンプが前記計測部により計測されたときの前記道路地点と前記移動体との距離に基づいて、前記移動体の前後方向における前記計測部の位置を推定する。
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置であって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定部
を有し、
前記推定部は、前記移動体の旋回中において前記加速度検出部が出力する前記移動体の左右方向の加速度データと、前記移動体に搭載された加速度センサが出力する前記移動体の左右方向の加速度データと、前記移動体に搭載されたジャイロセンサが出力する前記移動体のヨーレートとに基づいて、前記移動体の左右方向における前記計測部の位置を推定する。
【0007】
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置が実行する制御方法であって、
前記移動体が所定速度により走行または停止しているときの、前記計測部に設けられた加速度検出部が出力する加速度データに基づいて、前記計測部のロール方向及びピッチ方向の姿勢を推定する推定工程を有する。
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置が実行する制御方法であって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定工程を有し、
前記推定工程は、勾配が変化する道路地点、あるいは路面上のバンプが前記計測部により計測されたときの前記道路地点と前記移動体との距離に基づいて、前記移動体の前後方向における前記計測部の位置を推定する。
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置が実行する制御方法であって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定工程を有し、
前記推定工程は、前記移動体の旋回中において前記加速度検出部が出力する前記移動体の左右方向の加速度データと、前記移動体に搭載された加速度センサが出力する前記移動体の左右方向の加速度データと、前記移動体に搭載されたジャイロセンサが出力する前記移動体のヨーレートとに基づいて、前記移動体の左右方向における前記計測部の位置を推定する。
【0008】
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定するコンピュータが実行するプログラムであって、
前記移動体が所定速度により走行または停止しているときの、前記計測部に設けられた加速度検出部が出力する加速度データに基づいて、前記計測部のロール方向及びピッチ方向の姿勢を推定する推定部
として前記コンピュータを機能させる。
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定するコンピュータが実行するプログラムであって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定部として前記コンピュータを機能させ、
前記推定部は、勾配が変化する道路地点、あるいは路面上のバンプが前記計測部により計測されたときの前記道路地点と前記移動体との距離に基づいて、前記移動体の前後方向における前記計測部の位置を推定する。
また、請求項に記載の発明は、
対象物に対する距離を計測する計測部の移動体に対する姿勢を推定するコンピュータが実行するプログラムであって、
前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定部
として前記コンピュータを機能させ、
前記推定部は、前記移動体の旋回中において前記加速度検出部が出力する前記移動体の左右方向の加速度データと、前記移動体に搭載された加速度センサが出力する前記移動体の左右方向の加速度データと、前記移動体に搭載されたジャイロセンサが出力する前記移動体のヨーレートとに基づいて、前記移動体の左右方向における前記計測部の位置を推定する。
【図面の簡単な説明】
【0009】
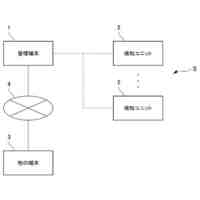
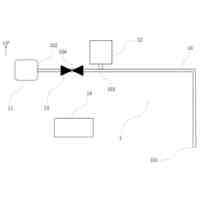
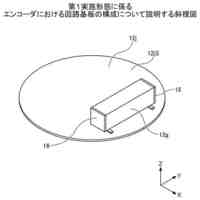
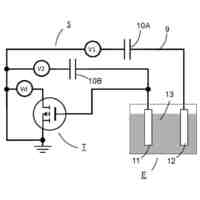
運転支援システムの概略構成図である。
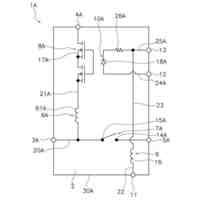
車載機の機能的構成を示すブロック図である。
2次元座標により表された車両座標系とライダ座標系との関係を示す図である。
3次元座標により表された車両座標系とライダ座標系との関係を示す図である。
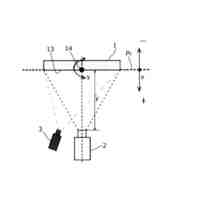
車両座標系及びライダ座標系における重力加速度のベクトルを示した図である。
ライダのz方向位置の変化前後において平坦な路面を車両が走行中のときにライダにより計測された路面のz方向の計測値を示した図である。
上り坂の始点の前後を走行中の車両のライダのz方向の計測値の大きさを示す図である。
車両の走行時に得られる計測値及び車体ピッチ角の時間変化を示すグラフである。
バンプの前後を走行中の車両のライダのz方向の計測値の大きさを示す図である。
車両の走行時に得られる計測値及び車体ピッチレートの時間変化を示すグラフである。
旋回中の車両に生じる作用を概略的に示した図である。
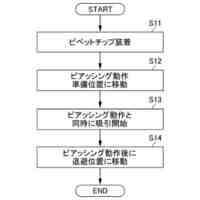
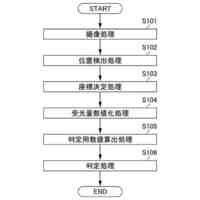
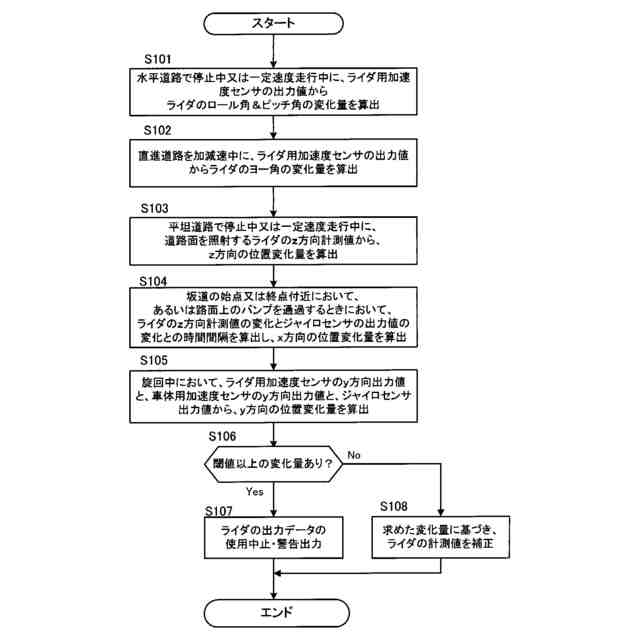
ライダの出力を補正する処理の手順を示すフローチャートの一例である。
【発明を実施するための形態】
【0010】
本発明の好適な実施形態によれば、対象物に対する距離を計測する計測部の移動体に対する姿勢を推定する推定装置であって、前記移動体が加減速して走行しているときの、前記計測部に設けられた加速度検出部の検出結果に基づいて、前記移動体に対する前記計測部の姿勢を推定する推定部を有する。推定装置は、この態様により、車両に対するヨー方向における計測部の姿勢を好適に推定することができる。なお、「加減速して走行している」態様とは、加速して走行している態様、及び、減速して走行している態様のいずれの態様も含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
1か月前
株式会社東光高岳
計器
29日前
株式会社豊田自動織機
産業車両
4日前
株式会社ミツトヨ
測定器
26日前
日本精機株式会社
液面検出装置
1か月前
大和製衡株式会社
組合せ秤
1か月前
株式会社国際電気
試験装置
11日前
個人
センサーを備えた装置
1日前
大和製衡株式会社
組合せ秤
1か月前
大和製衡株式会社
組合せ秤
1か月前
日本精機株式会社
施工管理システム
1日前
株式会社東芝
センサ
今日
大同特殊鋼株式会社
疵検出方法
26日前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
27日前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社田中設備
報知装置
5日前
エグゼヴィータ株式会社
端末装置
27日前
株式会社CAST
センサ固定治具
4日前
ダイハツ工業株式会社
試験用治具
1か月前
日本特殊陶業株式会社
ガスセンサ
27日前
WOTA株式会社
液位検出システム
11日前
日本装置開発株式会社
X線検査装置
14日前
タカノ株式会社
試料分析装置
26日前
富士電機株式会社
エンコーダ
28日前
タカノ株式会社
試料分析装置
26日前
富士電機株式会社
エンコーダ
28日前
株式会社熊平製作所
刃物類判別装置
4日前
柳井電機工業株式会社
部材検査装置
27日前
株式会社クボタ
作業車
1か月前
バイオテック株式会社
容器設置装置
27日前
オムロン株式会社
スイッチング装置
11日前
JNC株式会社
トランジスタ型センサ
26日前
新電元メカトロニクス株式会社
位置検出装置
1か月前
トヨタ自動車株式会社
歯車の検査方法
1か月前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
8日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ