TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086096
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023199912
出願日
2023-11-27
発明の名称
通信制御システム、サーバ装置、移動体および通信制御方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
H04W
72/0453 20230101AFI20250530BHJP(電気通信技術)
要約
【課題】簡易な構成により移動体の適切な通信を実現する。
【解決手段】移動体と、通信装置と、の間の無線通信を制御する通信制御システムであって、移動体の状態に関する情報である移動体情報と、移動体の製造状況に関する情報である製造状況情報とのうち少なくとも一方を利用して、第1の周波数帯と、第1の周波数帯よりも高い第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、無線通信に利用する周波数帯である利用周波数帯を決定する周波数帯決定部と、決定された周波数帯を利用して無線通信を実行するように通信装置を制御する通信制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体と、通信装置と、の間の無線通信を制御する通信制御システムであって、
前記移動体の状態に関する情報である移動体情報と、前記移動体の製造状況に関する情報である製造状況情報とのうち少なくとも一方を利用して、第1の周波数帯と、前記第1の周波数帯よりも高い第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定する周波数帯決定部と、
前記利用周波数帯を利用して前記無線通信を実行するように前記通信装置による前記無線通信を制御する通信制御部と、
を備える、
通信制御システム。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の通信制御システムであって、
前記移動体情報は、前記移動体の位置を示す移動体位置情報を含む、
通信制御システム。
【請求項3】
請求項2に記載の通信制御システムであって、
前記周波数帯決定部は、前記移動体位置情報を利用して、
前記移動体に対して予め定められた作業が実行される領域として予め定められた作業領域に前記移動体が位置している場合、前記第2の周波数帯を前記利用周波数帯として決定し、
前記移動体が前記作業領域に位置していない場合、前記第1の周波数帯を前記利用周波数帯として決定する、
通信制御システム。
【請求項4】
請求項3に記載の通信制御システムであって、
前記作業は、前記移動体に対する部品の組付け、前記移動体の塗装と、前記移動体の検査と、のうちの少なくともひとつを含む、
通信制御システム。
【請求項5】
請求項1に記載の通信制御システムであって、
前記移動体情報は、前記移動体の速度を示す速度情報を含み、
前記周波数帯決定部は、
前記速度情報を利用して、前記移動体の速度が予め定められた閾値未満であるか否かを特定し、
前記移動体の速度が前記閾値未満である場合、前記第2の周波数帯を前記利用周波数帯として決定し、
前記移動体の速度が前記閾値以上である場合、前記第1の周波数帯を前記利用周波数帯として決定する、
通信制御システム。
【請求項6】
請求項5に記載の通信制御システムであって、
前記周波数帯決定部は、前記移動体の移動制御に関する制御情報を利用して特定された前記移動体の速度を、前記速度情報として利用する、
通信制御システム。
【請求項7】
請求項1に記載の通信制御システムであって、
前記製造状況情報は、前記移動体に取り付けられた部品に関する部品情報を含む、
通信制御システム。
【請求項8】
請求項7に記載の通信制御システムであって、
前記周波数帯決定部は、
前記部品情報を利用して、予め指定された工程である指定工程以前の工程に前記移動体が位置しているか否かを特定し、
前記指定工程以前の工程に前記移動体が位置している場合、前記第2の周波数帯を前記利用周波数帯として決定し、
前記指定工程よりも後の工程に前記移動体が位置している場合、前記第1の周波数帯を前記利用周波数帯として決定する、
通信制御システム。
【請求項9】
請求項7に記載の通信制御システムであって、
前記周波数帯決定部は、
前記部品情報を利用して、前記移動体に取り付けられた部品の数である取付済部品数を特定し、
前記取付済部品数が予め定められた閾値未満である場合、前記第2の周波数帯を前記利用周波数帯として決定し、
前記取付済部品数が前記閾値以上である場合、前記第1の周波数帯を前記利用周波数帯として決定する、
通信制御システム。
【請求項10】
請求項7に記載の通信制御システムであって、
前記周波数帯決定部は、
前記部品情報を利用して、予め指定された部品である指定部品が前記移動体に対して既に取り付けられているか否かを特定し、
前記指定部品が前記移動体に対して未だ取り付けられていない場合、前記第2の周波数帯を前記利用周波数帯として決定し、
前記指定部品が前記移動体に対して既に取り付けられている場合、前記第1の周波数帯を前記利用周波数帯として決定する、
通信制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、通信制御システム、サーバ装置、移動体および通信制御方法に関する。
続きを表示(約 7,600 文字)
【背景技術】
【0002】
従来、通信対象となる車両の走行速度に応じて通信方法を切り替える無線通信装置が知られている(特許文献1)。特許文献1に記載の無線通信装置は、無線LAN通信部とTCP/IP通信部とを備え、車両の走行速度に応じて、車両との無線通信に用いる通信経路を切り替える。
【先行技術文献】
【特許文献】
【0003】
特開2012-175686号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、通信方式の異なる複数の通信経路を予め用意する必要があり、システム構成が複雑になるという問題がある。かかる問題は、車両に限らず、任意の種類の移動体においても共通する。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、移動体と、通信装置と、の間の無線通信を制御する通信制御システムが提供される。この通信制御システムは、前記移動体の状態に関する情報である移動体情報と、前記移動体の製造状況に関する情報である製造状況情報とのうち少なくとも一方を利用して、第1の周波数帯と、前記第1の周波数帯よりも高い第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定する周波数帯決定部と、前記利用周波数帯を利用して前記無線通信を実行するように前記通信装置を制御する通信制御部と、を備える。
この形態の通信制御システムによれば、第1の周波数帯と第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、無線通信に利用する周波数帯である利用周波数帯を決定し、利用周波数帯を利用して無線通信を実行するように通信装置を制御する。このため、利用周波数帯を切り替えることにより容易に通信方式を切り替えることができ、予め用意された複数の通信経路を切り替えることにより通信方式を切り替える形態と比較して、移動体と通信装置との無線通信のためのシステム構成が複雑になることを抑制できる。また、移動体情報と製造状況情報とのうち、少なくとも一方を利用して利用周波数帯を決定するので、移動体情報と製造状況情報との少なくとも一方に応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(2)上記実施形態において、前記移動体情報は、前記移動体の位置を示す移動体位置情報を含んでもよい。
この形態の通信制御システムによれば、移動体情報は移動体位置情報を含むので、移動体の位置に応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
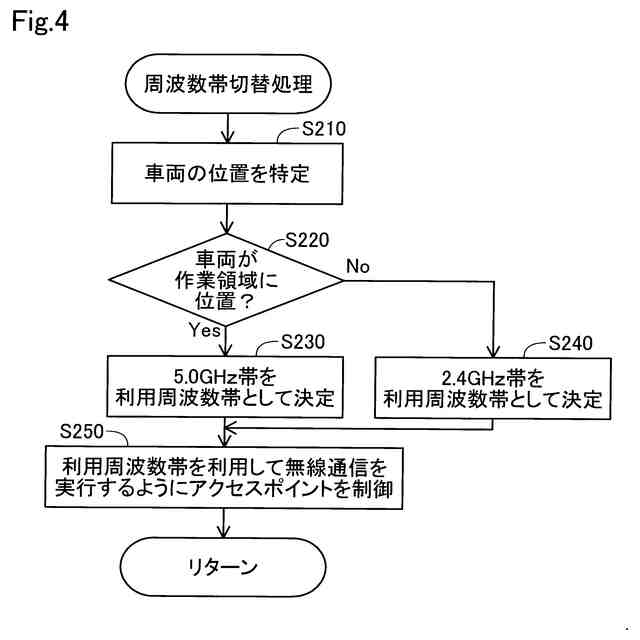
(3)上記実施形態において、前記周波数帯決定部は、前記移動体位置情報を利用して、前記移動体に対して予め定められた作業が実行される領域として予め定められた作業領域に前記移動体が位置している場合、前記第2の周波数帯を前記利用周波数帯として決定し、前記移動体が前記作業領域に位置していない場合、前記第1の周波数帯を前記利用周波数帯として決定してもよい。
この形態の通信制御システムによれば、移動体位置情報を利用して、作業領域に移動体が位置している場合、第2の周波数帯を利用周波数帯として決定し、移動体が作業領域に位置していない場合、第1の周波数帯を利用周波数帯として決定する。このため、移動体が作業領域に位置するか否かに応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(4)上記実施形態において、前記作業は、前記移動体に対する部品の組付け、前記移動体の塗装と、前記移動体の検査と、のうちの少なくともひとつを含んでもよい。
この形態の通信制御システムによれば、作業は、移動体に対する部品の組付け、移動体の塗装と、移動体の検査と、のうちの少なくともひとつを含むので、移動体が、移動体に対する部品の組付け、移動体の塗装と、移動体の検査と、のうちの少なくともひとつが実行される工程に位置するか否かに応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
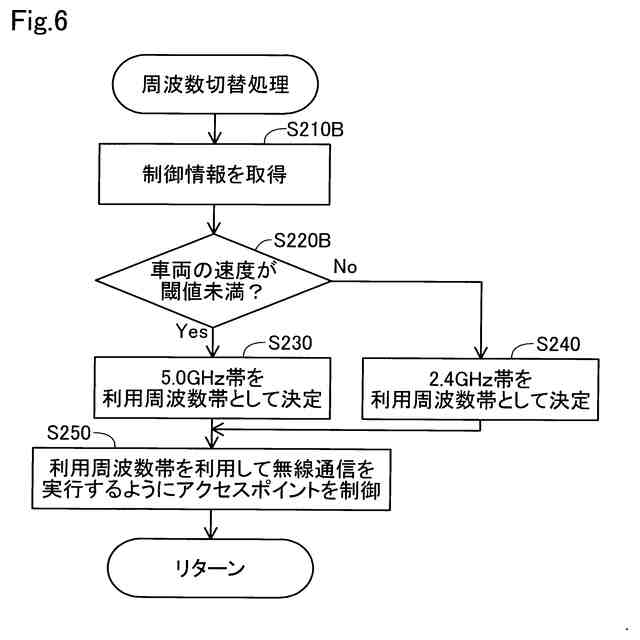
(5)上記実施形態において、前記移動体情報は、前記移動体の速度を示す速度情報を含み、前記周波数帯決定部は、前記速度情報を利用して、前記移動体の速度が予め定められた閾値未満である場合、前記第2の周波数帯を前記利用周波数帯として決定し、前記移動体の速度が前記閾値以上である場合、前記第1の周波数帯を前記利用周波数帯として決定してもよい。
この形態の通信制御システムによれば、速度情報を利用して、移動体の速度が閾値未満である場合、第2の周波数帯を利用周波数帯として決定し、移動体の速度が閾値以上である場合、第1の周波数帯を利用周波数帯として決定する。このため、移動体の速度に応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(6)上記実施形態において、前記周波数帯決定部は、前記移動体の移動制御に関する制御情報を利用して特定された前記移動体の速度を、前記速度情報として利用してもよい。
この形態の通信制御システムによれば、制御情報を利用して特定された移動体の速度を速度情報として利用するので、移動体の速度を容易に特定でき、移動体の速度に応じて適切な周波数帯を決定することを容易に実現できる。
(7)上記実施形態において、前記製造状況情報は、前記移動体に取り付けられた部品に関する部品情報を含んでもよい。
この形態の通信制御システムによれば、製造状況情報は部品情報を含むので、移動体に対する部品の取付状態に応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
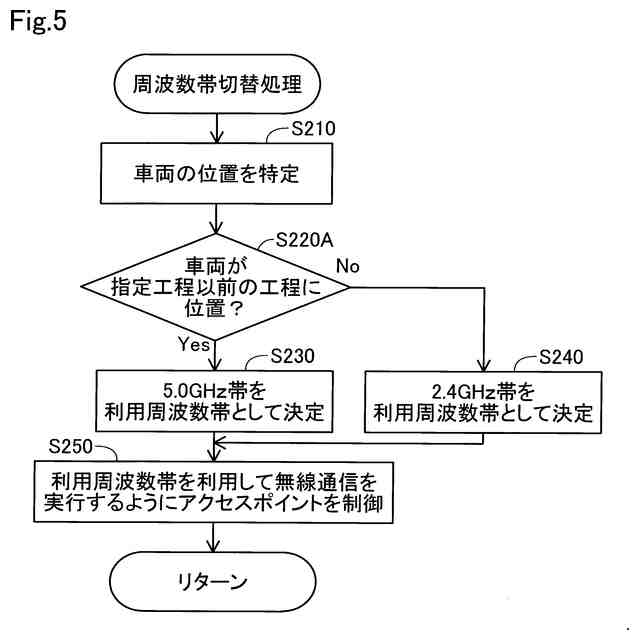
(8)上記実施形態において、前記周波数帯決定部は、前記部品情報を利用して、予め指定された工程である指定工程以前の工程に前記移動体が位置しているか否かを特定し、前記指定工程以前の工程に前記移動体が位置している場合、前記第2の周波数帯を前記利用周波数帯として決定し、前記指定工程よりも後の工程に前記移動体が位置している場合、前記第1の周波数帯を前記利用周波数帯として決定してもよい。
この形態の通信制御システムによれば、部品情報として、指定工程以前の工程に移動体が位置しているか否かを特定し、指定工程以前の工程に移動体が位置している場合、第2の周波数帯を利用周波数帯として決定し、指定工程よりも後の工程に移動体が位置している場合、第1の周波数帯を利用周波数帯として決定する。このため、指定工程以前の工程に移動体が位置しているか否かに応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(9)上記実施形態において、前記周波数帯決定部は、前記部品情報を利用して、前記移動体に取り付けられた部品の数である取付済部品数を特定し、前記取付済部品数が予め定められた閾値未満である場合、前記第2の周波数帯を前記利用周波数帯として決定し、前記取付済部品数が前記閾値以上である場合、前記第1の周波数帯を前記利用周波数帯として決定してもよい。
この形態の通信制御システムによれば、部品情報として、取付済部品数を特定し、取付済部品数が予め定められた閾値未満である場合、第2の周波数帯を利用周波数帯として決定し、取付済部品数が閾値以上である場合、第1の周波数帯を利用周波数帯として決定する。このため、取付済部品数に応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(10)上記実施形態において、前記周波数帯決定部は、前記部品情報を利用して、予め指定された部品である指定部品が前記移動体に対して既に取り付けられているか否かを特定し、前記指定部品が前記移動体に対して未だ取り付けられていない場合、前記第2の周波数帯を前記利用周波数帯として決定し、前記指定部品が前記移動体に対して既に取り付けられている場合、前記第1の周波数帯を前記利用周波数帯として決定してもよい。
この形態の通信制御システムによれば、部品情報として、指定部品が移動体に対して既に取り付けられているか否かを特定し、指定部品が移動体に対して未だ取り付けられていない場合、第2の周波数帯を利用周波数帯として決定し、指定部品が移動体に対して既に取り付けられている場合、第1の周波数帯を利用周波数帯として決定する。このため、指定部品が移動体に対して既に取り付けられているか否かに応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(11)上記実施形態において、前記製造状況情報は、前記移動体が製造される工場のタクトタイムに関する情報を含み、前記周波数帯決定部は、前記タクトタイムが予め定められた閾値よりも長い場合、前記第2の周波数帯を前記利用周波数帯として決定し、前記タクトタイムが前記閾値以下である場合、前記第1の周波数帯を前記利用周波数帯として決定してもよい。
この形態の通信制御システムによれば、製造状況情報は、移動体が製造される工場のタクトタイムに関する情報を含み、タクトタイムが予め定められた閾値よりも長い場合、第2の周波数帯を利用周波数帯として決定し、タクトタイムが閾値以下である場合、第1の周波数帯を利用周波数帯として決定する。このため、タクトタイムに応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(12)上記実施形態において、前記通信制御部は、前記第2の周波数帯が前記利用周波数帯として決定された場合に、前記第1の周波数帯を利用する場合と比較して情報量の大きい情報を対象とする前記無線通信を実行してもよい。
この形態の通信制御システムによれば、第2の周波数帯が利用周波数帯として決定された場合に、第1の周波数帯を利用する場合と比較して情報量の大きい情報を対象とする通信を実行するので、情報量の大きい情報を対象とする通信が必要な場合にのみ第2の周波数帯を利用する形態と比較して、情報量の大きい情報を対象とする通信の実行タイミングの自由度の低下を抑制できる。
(13)上記実施形態において、前記通信装置は、前記移動体と、前記移動体の外部に位置する外部装置との前記無線通信を中継する通信中継装置であってもよい。
この形態の通信制御システムによれば、移動体と通信中継装置との間の無線通信を、適切な周波数帯を利用して実現できる。
(14)上記実施形態において、前記外部装置は、前記移動体の無人運転を制御するサーバ装置であってもよい。
この形態の通信制御システムによれば、移動体とサーバ装置との間の通信中継装置を介した無線通信を、適切な周波数帯を利用して実現できる。
(15)本開示の他の形態によれば、通信中継装置を介して移動体との間で無線通信を実行するサーバ装置が提供される。このサーバ装置は、前記移動体の状態に関する情報である移動体情報と、前記移動体の製造状況に関する情報である製造状況情報とのうち、少なくとも一方を利用して、第1の周波数帯と、前記第1の周波数帯よりも高い第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定する周波数帯決定部と、前記利用周波数帯を利用して前記無線通信を実行するように前記通信中継装置を制御する通信制御部と、を備える。
この形態のサーバ装置によれば、第1の周波数帯と第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定し、利用周波数帯を利用して無線通信を実行するように通信中継装置を制御する。このため、利用周波数帯を切り替えることにより容易に通信方式を切り替えることができ、予め用意された複数の通信経路を切り替えることにより通信方式を切り替える形態と比較して、移動体と通信中継装置との無線通信のためのシステム構成が複雑になることを抑制できる。また、移動体情報と製造状況情報とのうち、少なくとも一方を利用して利用周波数帯を決定するので、移動体情報と製造状況情報との少なくとも一方に応じて適切な周波数帯を利用して、移動体と通信中継装置との無線通信を実現できる。
(16)本開示の他の形態によれば、通信装置との間で無線通信を実行する移動体が提供される。この移動体は、前記移動体の状態に関する情報である移動体情報と、前記移動体の製造状況に関する情報である製造状況情報とのうち、少なくとも一方を利用して、第1の周波数帯と、前記第1の周波数帯よりも高い第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定する周波数帯決定部と、前記利用周波数帯を利用して前記無線通信を実行するように前記通信装置を制御する通信制御部と、を備える。
この形態の移動体によれば、第1の周波数帯と第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定し、利用周波数帯を利用して無線通信を実行するように通信装置を制御する。このため、利用周波数帯を切り替えることにより容易に通信方式を切り替えることができ、予め用意された複数の通信経路を切り替えることにより通信方式を切り替える形態と比較して、移動体と通信装置との無線通信のためのシステム構成が複雑になることを抑制できる。また、移動体情報と製造状況情報とのうち、少なくとも一方を利用して利用周波数帯を決定するので、移動体情報と製造状況情報との少なくとも一方に応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
(17)本開示の他の形態によれば、移動体と、通信装置と、の間の無線通信を制御する通信制御方法が提供される。この通信制御方法は、前記移動体の状態に関する情報である移動体情報と、前記移動体の製造状況に関する情報である製造状況情報とのうち、少なくとも一方を利用して、第1の周波数帯と、前記第1の周波数帯よりも高い第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定するステップと、前記利用周波数帯を利用して前記無線通信を実行するように前記通信装置を制御するステップと、を備える。
この形態の制御方法によれば、第1の周波数帯と第2の周波数帯と、を少なくとも含む周波数帯の候補のうちから、前記無線通信に利用する周波数帯である利用周波数帯を決定し、利用周波数帯を利用して無線通信を実行するように通信装置を制御する。このため、利用周波数帯を切り替えることにより容易に通信方式を切り替えることができ、予め用意された複数の通信経路を切り替えることにより通信方式を切り替える形態と比較して、移動体と通信装置との無線通信のためのシステム構成が複雑になることを抑制できる。また、移動体情報と製造状況情報とのうち、少なくとも一方を利用して利用周波数帯を決定するので、移動体情報と製造状況情報との少なくとも一方に応じて適切な周波数帯を利用して、移動体と通信装置との無線通信を実現できる。
【図面の簡単な説明】
【0007】
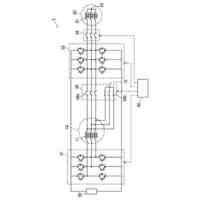
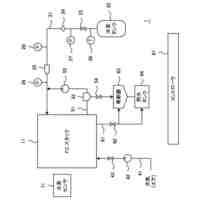
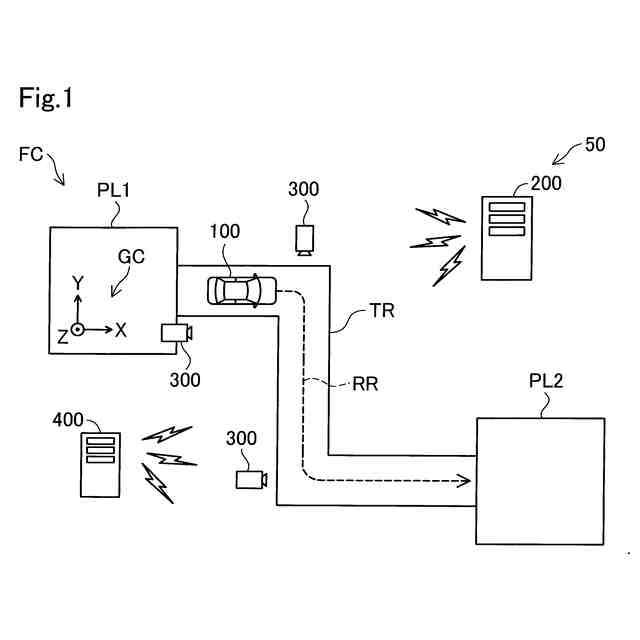
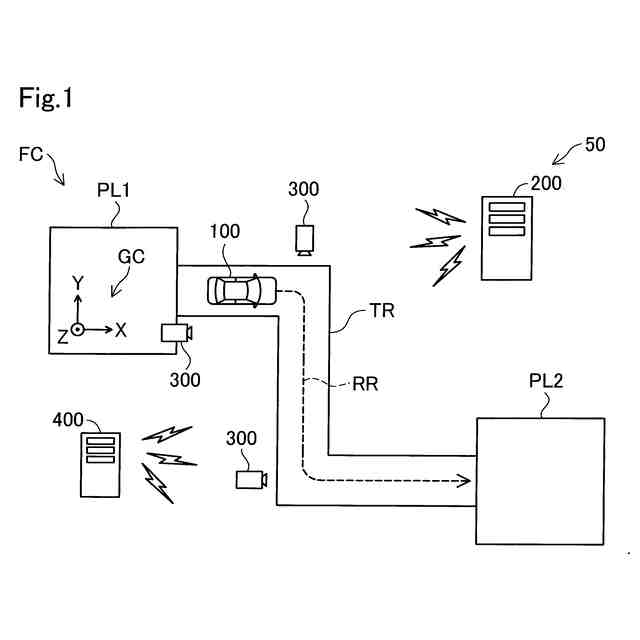
第1実施形態における制御システムの構成を示す概念図である。
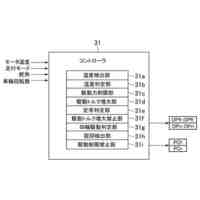
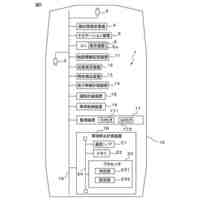
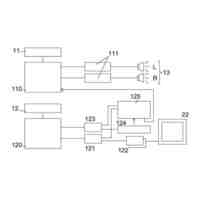
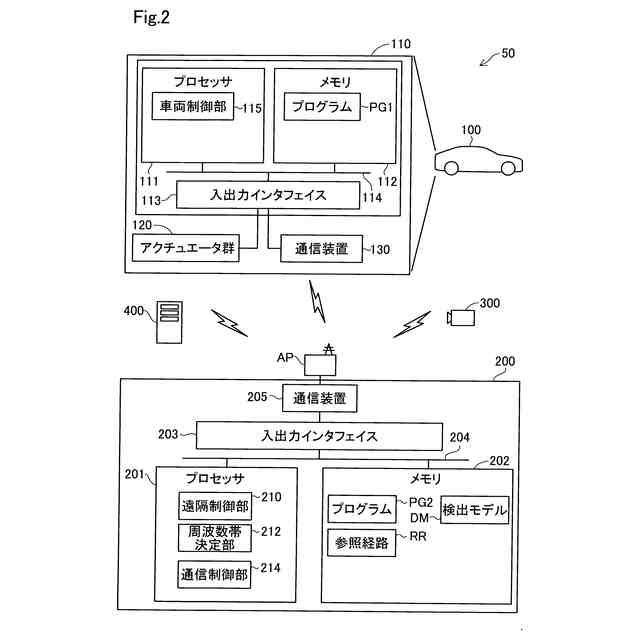
制御システムの構成を示すブロック図である。
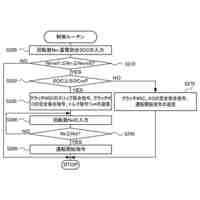
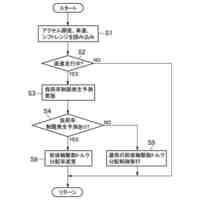
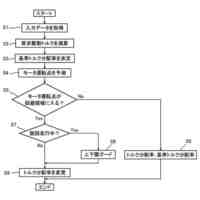
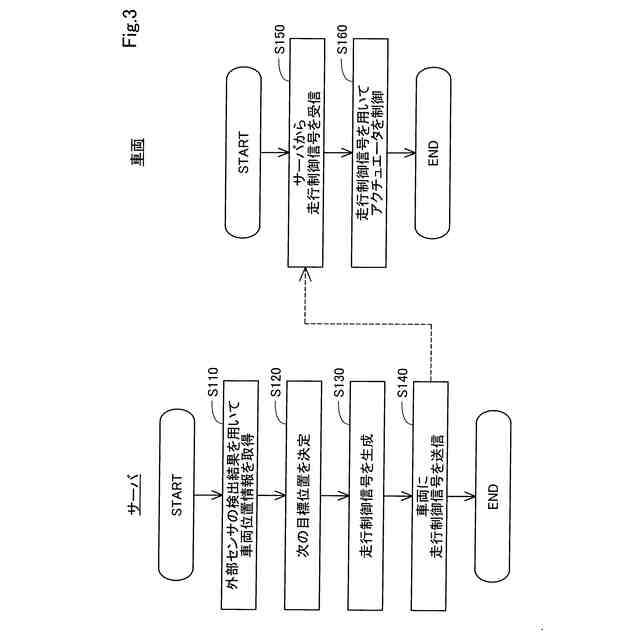
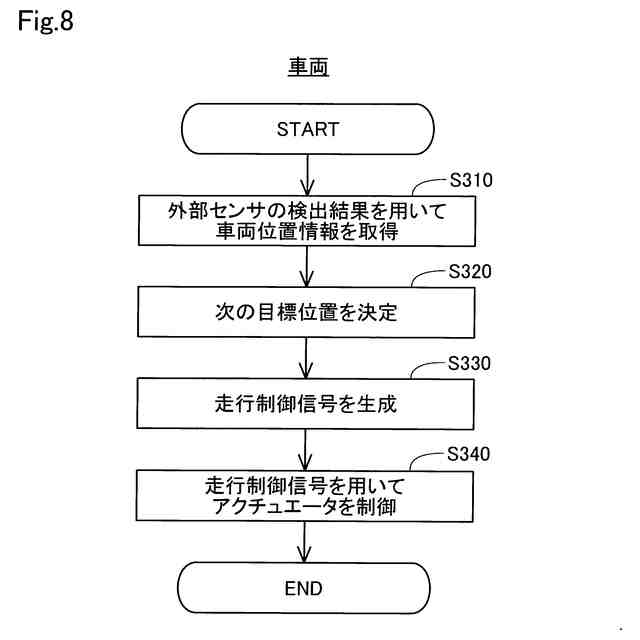
第1実施形態における車両の走行制御の処理手順を示すフローチャートである。
第1実施形態の周波数帯切替処理の手順を示すフローチャートである。
第2実施形態の周波数帯切替処理の手順を示すフローチャートである。
第3実施形態の周波数帯切替処理の手順を示すフローチャートである。
第4実施形態における制御システムの構成を示すブロック図である。
第4実施形態における車両の走行制御の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
A.第1実施形態:
A-1.システム構成:
図1は、第1実施形態における制御システム50の構成を示す概念図である。制御システム50は、移動体としての1以上の車両100と、サーバ装置200と、1以上の外部センサ300とを備える。
【0009】
本開示において、「移動体」は、移動し得る物体を意味し、例えば、車両や電動垂直離着陸機(いわゆる空飛ぶ自動車)である。車両は、車輪によって走行する車両であっても無限軌道によって走行する車両であってもよく、例えば、乗用車、トラック、バス、二輪車、四輪車、戦車、工事用車両などである。車両は、電気自動車(BEV:Battery Electric Vehicle)、ガソリン自動車、ハイブリッド自動車、ならびに燃料電池自動車を含む。移動体が車両以外である場合には、本開示における「車両」「車」との表現を、適宜に「移動体」に置き換えることができ、「走行」との表現を、適宜に「移動」に置き換えることができる。
【0010】
車両100は、無人運転により走行可能に構成されている。「無人運転」とは、搭乗者の走行操作によらない運転を意味する。走行操作とは、車両100の「走る」、「曲がる」、「止まる」の少なくともいずれかに関する操作を意味する。無人運転は、車両100の外部に位置する装置を用いた自動または手動の遠隔制御によって、あるいは、車両100の自律制御によって実現される。無人運転によって走行している車両100には、走行操作を行わない搭乗者が搭乗していてもよい。走行操作を行わない搭乗者には、例えば、単に車両100の座席に着座している人や、組み付け、検査、スイッチ類の操作といった走行操作とは異なる作業を車両100に乗りながら行っている人が含まれる。なお、搭乗者の走行操作による運転は、「有人運転」と呼ばれることがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
内燃機関
2日前
トヨタ自動車株式会社
防曇装置
2日前
トヨタ自動車株式会社
水系電池
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
誘導電動機
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
車両用制御装置
2日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
リチウム二次電池
2日前
トヨタ自動車株式会社
車間距離制御装置
2日前
トヨタ自動車株式会社
リスク評価システム
2日前
トヨタ自動車株式会社
電動車両の制御装置
2日前
トヨタ自動車株式会社
歯車機構の潤滑構造
2日前
トヨタ自動車株式会社
車両前部の冷却構造
2日前
トヨタ自動車株式会社
左右輪独立駆動型車両
2日前
トヨタ自動車株式会社
補正フィルタの生成方法
2日前
トヨタ自動車株式会社
電動車両の駆動力制御装置
2日前
株式会社デンソー
半導体装置
2日前
トヨタ自動車株式会社
電気自動車及び車両管理システム
2日前
株式会社豊田自動織機
燃料電池システム
2日前
トヨタ自動車株式会社
電気自動車及び車両特性カスタマイズシステム
2日前
トヨタ自動車株式会社
リチウムイオン電池及びリチウムイオン電池の製造方法
2日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
通信制御システム、サーバ装置、移動体および通信制御方法
2日前
トヨタ自動車株式会社
アクチュエータ、並びにそれを備えるロボット、装具、及び触覚デバイス
2日前
トヨタ自動車株式会社
ガスタンクおよびその製造方法
3日前
トヨタ自動車株式会社
車両制御装置、車両制御用コンピュータプログラム及び車両制御方法
3日前
株式会社SOKEN
制御装置、制御方法、および制御プログラム
2日前
個人
携帯端末保持具
27日前
個人
音響装置
24日前
日本無線株式会社
音声通信方式
24日前
日本精機株式会社
投影システム
1か月前
キヤノン株式会社
通信装置
13日前
日本精機株式会社
車両用表示装置
11日前
キヤノン電子株式会社
画像読取装置
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ