TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079936
公報種別
公開特許公報(A)
公開日
2025-05-23
出願番号
2023192822
出願日
2023-11-13
発明の名称
情報処理装置、情報処理方法及びコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/246 20240101AFI20250516BHJP(制御;調整)
要約
【課題】
自己位置推定の精度低下を抑制可能な情報処理装置を提供する。
【解決手段】
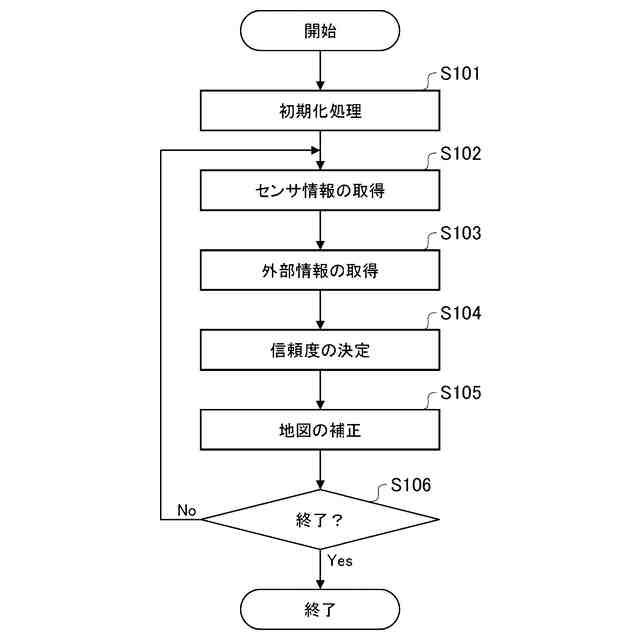
情報処理装置において、移動体の位置又は姿勢の推定に用いられる計測値を測定するセンサから前記計測値を取得するセンサ情報取得部と、前記センサ情報取得部が取得する前記計測値の信頼性に影響を与える要因に関する外部情報を取得する外部情報取得部と、前記外部情報取得部により取得した前記外部情報に基づいて前記移動体の前記位置又は前記姿勢を推定するために用いる地図を補正する補正部と、を有する。
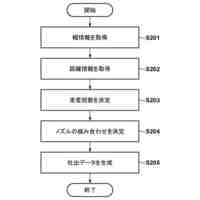
【選択図】 図2
特許請求の範囲
【請求項1】
移動体の位置又は姿勢の推定に用いられる計測値を測定するセンサから前記計測値を取得するセンサ情報取得部と、
前記センサ情報取得部が取得する前記計測値の信頼性に影響を与える要因に関する外部情報を取得する外部情報取得部と、
前記外部情報取得部により取得した前記外部情報に基づいて前記移動体の前記位置又は前記姿勢を推定するために用いる地図を補正する補正部と、
を有することを特徴とする情報処理装置。
続きを表示(約 1,000 文字)
【請求項2】
前記外部情報に基づいて前記計測値の信頼度を決定する信頼度決定部を有し、
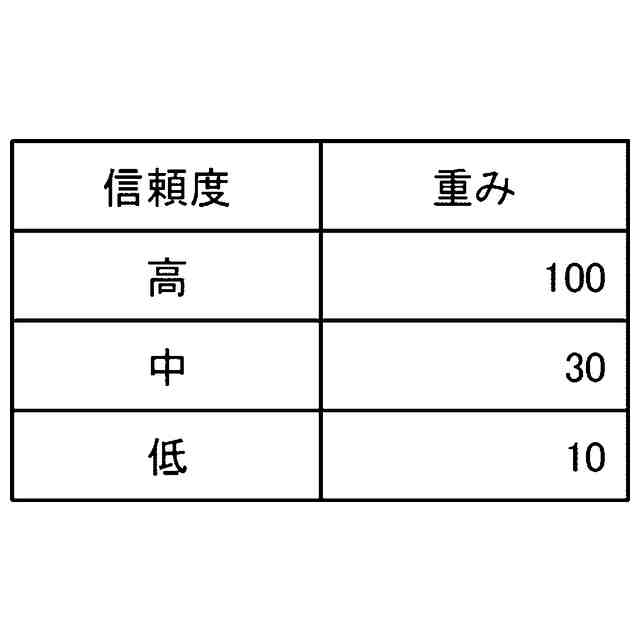
前記補正部は、前記信頼度に応じて前記計測値に対する重みを設定することで前記地図の補正をすることを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記補正部は、前記計測値に基づき前記位置又は前記姿勢を最適化計算により推定すると共に、前記最適化計算における拘束条件に対する重みを、前記信頼度に応じて設定することで前記地図の補正をすることを特徴とする請求項2に記載の情報処理装置。
【請求項4】
前記外部情報取得部が取得した前記外部情報に基づいて前記位置又は前記姿勢を推定する推定部を有することを特徴とする請求項1に記載の情報処理装置。
情報処理装置。
【請求項5】
前記外部情報に基づいて前記計測値の信頼度を決定する信頼度決定部を有し、
前記推定部は、前記信頼度に応じて、前記計測値に基づき推定した前記位置又は前記姿勢に対する重みを設定することで前記推定をすることを特徴とする請求項4に記載の情報処理装置。
【請求項6】
前記推定部は、前記計測値に基づき前記位置又は前記姿勢を最適化計算により推定すると共に、前記最適化計算における拘束条件に対する重みを、前記信頼度に応じて設定することを特徴とする請求項5に記載の情報処理装置。
【請求項7】
前記推定部は、前記計測値により推定した前記位置又は前記姿勢を対象に含む拡張カルマンフィルタ処理において、前記計測値に対する共分散の大きさを、前記信頼度に応じて設定した上で前記拡張カルマンフィルタ処理を実行することで前記位置又は前記姿勢を推定することを特徴とする請求項5に記載の情報処理装置。
【請求項8】
前記信頼度に関する情報、前記推定部が前記位置又は前記姿勢を推定する際に用いる情報、推定後の前記位置又は前記姿勢に関する情報の少なくとも1つを表示させる表示制御部を有することを特徴とする請求項5に記載の情報処理装置。
【請求項9】
前記計測値は、前記移動体の加速度、角速度、車輪の回転角の少なくとも1つを含むことを特徴とする請求項1に記載の情報処理装置。
【請求項10】
前記信頼度決定部は、前記外部情報に基づいて、前記移動体の振動又は前記移動体の車輪のスリップに関する情報に応じて前記信頼度を決定することを特徴とする請求項2に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法及びコンピュータプログラム等に関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
移動ロボットや清掃ロボット等の移動体に搭載した、カメラやLiDAR(Light Detection And Ranging)等の計測機器で計測した画像情報や距離情報等の計測情報に基づいて、自律移動する移動体システムが知られている。
【0003】
又、自己位置推定の精度を向上するために、カメラやLiDAR以外にもIMU(Inertial Measurement Unit)や車輪の回転角を計測するセンサ(ロータリーエンコーダ)等のセンサの計測情報を用いた技術が提案されている。しかし、IMUやロータリーエンコーダなどの計測値の信頼性が低い場合には、自己位置推定の精度が逆に低下する恐れがある。
【0004】
一方、特許文献1では、LiDARの計測値に基づく自己位置推定と車輪の回転角を利用するオドメトリによる自己位置推定を行う技術が記載されている。又、車輪のスリップを検知した時は車輪の回転角の計測値の信頼性が低いと判断してLiDARの計測値に基づき自己位置推定する方法が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2012-128781号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の方法では、スリップを検知してから自己位置推定方法の切り替えを行っているため、自己位置推定の精度が低下する場合がある。
【0007】
本発明は上記問題に鑑みてなされたものであり、自己位置推定の精度低下を抑制可能な情報処理装置を提供することを目的の一つとする。
【課題を解決するための手段】
【0008】
情報処理装置において、
移動体の位置又は姿勢の推定に用いられる計測値を測定するセンサから前記計測値を取得するセンサ情報取得部と、
前記センサ情報取得部が取得する前記計測値の信頼性に影響を与える要因に関する外部情報を取得する外部情報取得部と、
前記外部情報取得部により取得した前記外部情報に基づいて前記移動体の前記位置又は前記姿勢を推定するために用いる地図を補正する補正部と、
を有することを特徴とする。
【発明の効果】
【0009】
自己位置推定の精度低下を抑制可能な情報処理装置を提供できる。
【図面の簡単な説明】
【0010】
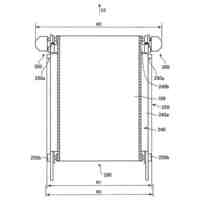
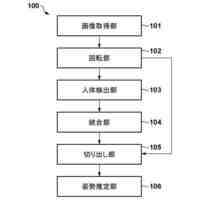
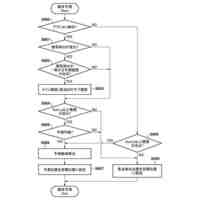
実施形態1に係る清掃ロボット11における清掃モードの切り替え動作例を示す図である。
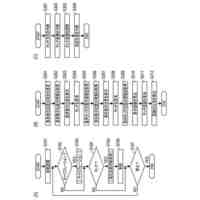
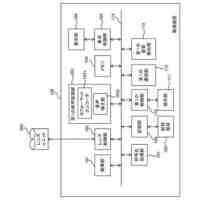
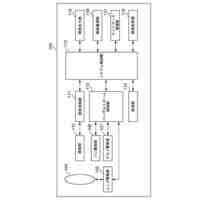
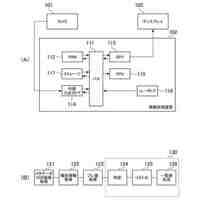
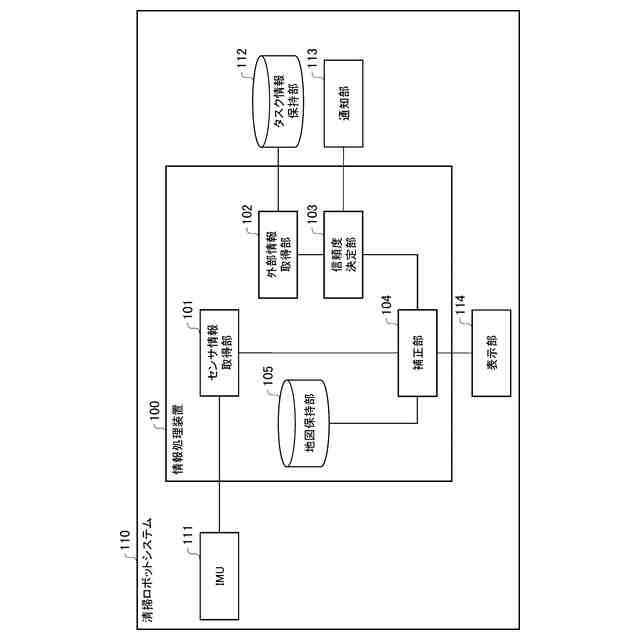
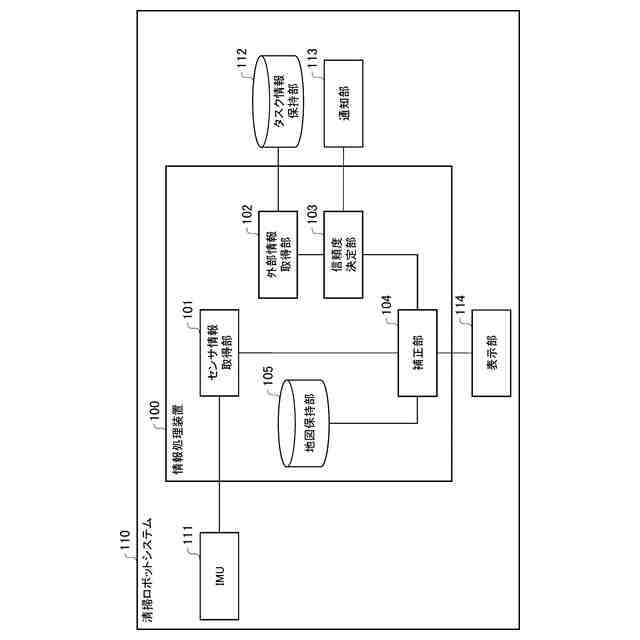
実施形態1に係る清掃ロボットシステム110の機能構成例を示す機能ブロック図である。
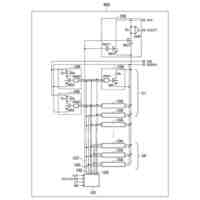
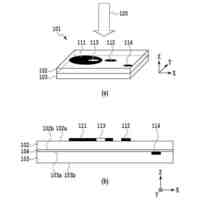
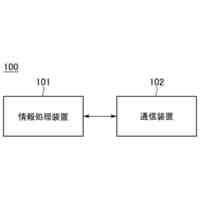
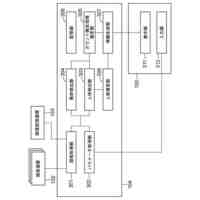
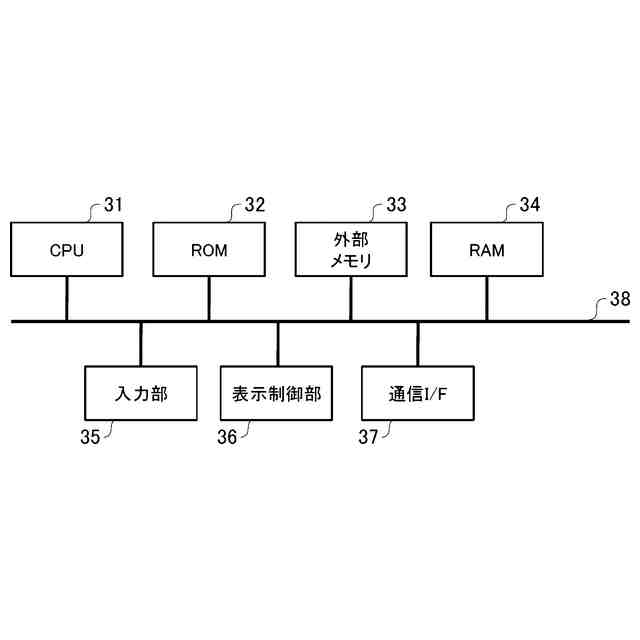
実施形態1に係る情報処理装置100のハードウェア構成例を示す図である。
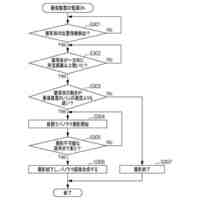
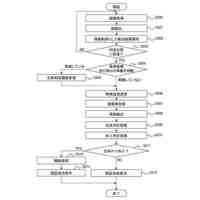
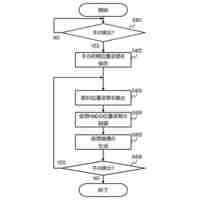
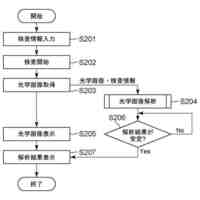
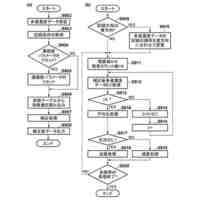
実施形態1に係る情報処理装置100が実行する情報処理方法の例を示すフローチャートである。
実施形態1に係る計測値の信頼度と地図補正時の重みの関係の例を示す図である。
実施形態1に係る情報処理装置のGUIの例を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
情報処理装置
2日前
キヤノン株式会社
記録素子基板
4日前
キヤノン株式会社
液体吐出ヘッド
3日前
キヤノン株式会社
液体吐出ヘッド
4日前
キヤノン株式会社
記録装置及び制御方法
4日前
キヤノン株式会社
分別装置及び分別方法
3日前
キヤノン株式会社
印刷装置及び印刷方法
4日前
キヤノン株式会社
収容袋、及び、記録装置
2日前
キヤノン株式会社
定着装置及び画像形成装置
5日前
キヤノン株式会社
ズームレンズおよび撮像装置
3日前
キヤノン株式会社
ズームレンズおよび撮像装置
3日前
キヤノン株式会社
画像読取装置及び画像形成装置
4日前
キヤノン株式会社
シート搬送装置及び画像形成装置
3日前
キヤノン株式会社
部材、部材の製造方法、及び機器
3日前
キヤノン株式会社
ベルト搬送装置及び画像形成装置
3日前
キヤノン株式会社
撮像装置、制御方法およびプログラム
4日前
キヤノン株式会社
顔認証装置、処理方法及びプログラム
4日前
キヤノン株式会社
検査装置、検査方法、及びプログラム
3日前
キヤノン株式会社
制御装置、制御方法、及びプログラム
2日前
キヤノン株式会社
情報処理装置、情報処理方法、プログラム
3日前
キヤノン株式会社
管理システム、制御方法、及びプログラム
3日前
キヤノン株式会社
振動型アクチュエータ、光学機器、電子機器
2日前
キヤノン株式会社
数値計算方法、プログラム、記録媒体及び装置
4日前
キヤノン株式会社
光学素子、光学素子の製造方法および光学機器
2日前
キヤノン株式会社
情報処理装置、情報処理方法、及びプログラム
2日前
キヤノン株式会社
放射線撮影制御装置、及び放射線撮影システム
2日前
キヤノン株式会社
画像処理装置、画像処理方法、及びプログラム
4日前
キヤノン株式会社
液体吐出装置、液体吐出方法及び物品の製造方法
4日前
キヤノン株式会社
画像処理装置、画像処理方法、及び、プログラム
2日前
キヤノン株式会社
画像処理装置、画像処理方法、及び、プログラム
4日前
キヤノン株式会社
認証装置、認証装置の制御方法、及びプログラム
2日前
キヤノン株式会社
情報処理装置、移動体、情報処理方法およびプログラム
3日前
キヤノン株式会社
画像形成装置、画像形成装置の制御方法、及びプログラム
5日前
キヤノン株式会社
焦点調節装置及び方法、撮像装置、プログラム、記憶媒体
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ