TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025082053
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195274
出願日
2023-11-16
発明の名称
数値計算方法、プログラム、記録媒体及び装置
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G06N
3/0455 20230101AFI20250521BHJP(計算;計数)
要約
【課題】ソルバとしてオートエンコーダを用いる手法では推論時に正しい数値解が求められているとはいえないという課題があった。ソルバとして、支配方程式を反復法で数回反復して潜在変数の解を求める手法では、遠方の境界条件の影響が考慮されず、解に誤差が発生するという課題があった。
【解決手段】入力変数を潜在変数に変換するエンコーダと、該潜在変数を入力として潜在変数の解を求めるソルバと、該潜在変数の解を支配方程式の数値解に変換するデコーダとを含む機械学習モデルをコンピュータに実行させることにより、連続体解析における支配方程式の数値解を求める数値計算方法であって、教師データと前記支配方程式の数値解との損失関数の値が小さくなるように該機械学習モデルのパラメータを定めるパラメータ決定工程を含むことを特徴とする数値計算方法。
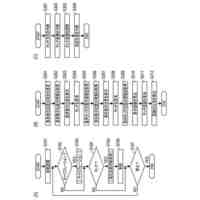
【選択図】図1
特許請求の範囲
【請求項1】
入力変数(x)を潜在変数(z)に変換するエンコーダと、該潜在変数を入力として潜在変数の解(z
*
)を求めるソルバと、該潜在変数の解を支配方程式の数値解(x
*
)に変換するデコーダとを含む機械学習モデルをコンピュータに実行させることにより、連続体解析における支配方程式の数値解を求める数値計算方法であって、教師データ(x
true
)と前記支配方程式の数値解(x
*
)との損失関数(L)の値が小さくなるように該機械学習モデルのパラメータ(ψ)を定めるパラメータ決定工程を含むことを特徴とする数値計算方法。
続きを表示(約 930 文字)
【請求項2】
前記ソルバにおいて、前記潜在変数(z)と前記潜在変数の解(z
*
)についての連立方程式(F(z,z
*
)=0)を解いて該潜在変数の解を求める工程を含む、請求項1に記載の数値計算方法。
【請求項3】
前記パラメータ決定工程において、該連立方程式(F(z,z
*
)=0)の該潜在変数の解(z
*
)に対するヤコビ行列を係数とする連立一次方程式を解いて求めた補助変数を利用して前記損失関数の前記潜在変数に対する勾配(∂L/∂z)を求める工程を含む、請求項2に記載の数値計算方法。
【請求項4】
前記入力変数(x)が計算条件を含む、請求項1に記載の数値計算方法。
【請求項5】
前記潜在変数(z)が前記入力変数(x)よりも粗い空間解像度の変数である、請求項1に記載の数値計算方法。
【請求項6】
前記支配方程式が非定常問題についての方程式であって、前記入力変数(x)が時刻tにおける値を含み、前記支配方程式の数値解(x
*
)が時刻t+Δtにおける値を含む、請求項1に記載の数値計算方法。
【請求項7】
前記エンコーダ、前記ソルバ及び前記デコーダの動作が、E(2)あるいはE(3)同変性を満たす、請求項1に記載の数値計算方法。
【請求項8】
前記教師データ(x
true
)は演繹的数値解法によって前記支配方程式を解くことにより作成される、請求項1に記載の数値計算方法。
【請求項9】
前記連立方程式(F(z,z
*
)=0)が前記支配方程式の離散化によって導出された方程式である、請求項2に記載の数値計算方法。
【請求項10】
前記連立方程式(F(z,z
*
)=0)が前記潜在変数の解(z
*
)を変数とする連立一次方程式であり、前記潜在変数(z)の中に該連立一次方程式の係数および定数項が含まれる、請求項2に記載の数値計算方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、機械学習モデルを構築して支配方程式の数値解を出力する数値計算方法、プログラム、記録媒体及び装置に関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
コンピュータ及び数値計算技術の進歩により、流体解析・電場解析・構造解析などさまざまな対象に対して数値計算による数値解を求めることが可能となっている。数値解を用いて装置設計することで、開発期間の短縮や経費の削減など開発効率の向上を行うことができる。
【0003】
非特許文献1、2では、エンコーダが入力変数を潜在変数へと変換し、ソルバが潜在変数の解を求め、デコーダが潜在変数の解を支配方程式の数値解に変換する機械学習モデルが提案されている。さらに、演繹的数値解法の数値解を教師データとして、デコーダの出力である支配方程式の数値解との差異を意味する損失関数を最小化するように、機械学習モデルのパラメータを求めることが提案されている。このように機械学習モデルのパラメータを定めることで、機械学習モデルは演繹的数値解法の数値解とほぼ一致する支配方程式の数値解を出力することができる。そして、機械学習モデルの規模を適切に調整することで、演繹的数値解法よりも高速に数値解を求めることが可能となる。また非特許文献3では、ソルバとして、支配方程式を反復法で数回反復して潜在変数の解を求める手法が記載されている。
【先行技術文献】
【非特許文献】
【0004】
R. Ranade, C. Hill, H. He, A. Maleki, J. Pathak, A Latent space solver for PDE generalization, arXiv:2104.02452
R. Ranade, C. Hill, H. He, A. Maleki, N. Chang, J. Pathak, A composable autoencoder-based iterative algorithm for accelerating numerical simulations, arXiv:2110.03780
M. Horie, N. Mitsume, Physics-Embedded Neural Networks: Graph Neural PDE Solvers with Mixed Boundary Conditions, arXiv: 2205.11912
【発明の概要】
【発明が解決しようとする課題】
【0005】
非特許文献1、2ではソルバとしてオートエンコーダを用いている。オートエンコーダのパラメータは、教師データを元として潜在変数の解を入力すると、同じ潜在変数の解を出力するように定められる。即ち、潜在変数の解(P)であれば、オートエンコーダの入出力が一致する(Q)ようにパラメータを定める。逆に推論の際には、オートエンコーダの入出力が一致するまで入力変数を修正する。即ち、入出力が一致する(Q)ならば潜在変数の解(P)であると判断している。但し、一般にPならばQが成り立つとしても、QならばPが成り立つとは限らず、推論時に正しい数値解が求められているとはいえないという課題がある。非特許文献3ではソルバとして、支配方程式を反復法で数回反復して潜在変数の解を求める手法が記載されているが、当該課題を解決できていない。
【課題を解決するための手段】
【0006】
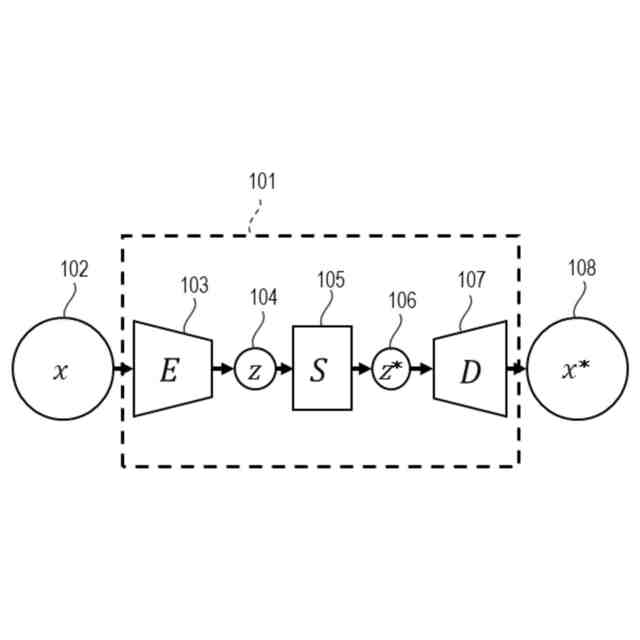
本発明の数値計算方法は、入力変数(x)を潜在変数(z)に変換するエンコーダと、該潜在変数を入力として潜在変数の解(z
*
)を求めるソルバと、該潜在変数の解を支配方程式の数値解(x
*
)に変換するデコーダとを含む機械学習モデルをコンピュータに実行させることにより、連続体解析における支配方程式の数値解を求める数値計算方法であって、教師データ(x
true
)と前記支配方程式の数値解との損失関数(L)の値が小さくなるように前記機械学習モデルのパラメータ(ψ)を定めるパラメータ決定工程を含むことを特徴とする。
【0007】
また本発明の数値計算方法は、前記ソルバにおいて、前記潜在変数(z)と前記潜在変数の解(z
*
)についての連立方程式(F(z,z
*
)=0)を解いて該潜在変数の解を求める陰解法工程を含み、前記パラメータ決定工程において、該連立方程式(F(z,z
*
)=0)の該潜在変数の解(z
*
)に対するヤコビ行列を係数とする連立一次方程式を解いて求めた補助変数を利用して前記損失関数の前記潜在変数に対する勾配(∂L/∂z)を求める補助変数利用工程を含むことが好ましい。
また本発明の数値計算方法は、前記入力変数(x)が計算条件を含むことが好ましい。
また本発明の数値計算方法は、前記潜在変数(z)が前記入力変数(x)よりも粗い空間解像度の変数であることが好ましい。
また本発明の数値計算方法は、前記支配方程式が非定常問題についての方程式であって、前記入力変数(x)が時刻tにおける値を含み、前記支配方程式の数値解(x
*
)が時刻t+Δtにおける値を含むことが好ましい。
また本発明の数値計算方法は、前記エンコーダ、前記ソルバ及び前記デコーダの動作が、E(2)あるいはE(3)同変性を満たすことが好ましい。
また本発明の数値計算方法は、前記教師データ(x
true
)が演繹的数値解法によって支配方程式を解くことにより作成されることが好ましい。
また本発明の数値計算方法は、前記連立方程式(F(z,z
*
)=0)が前記支配方程式の離散化によって導出された方程式であることが好ましい。
また本発明の数値計算方法は、前記連立方程式(F(z,z
*
)=0)が前記潜在変数の解(z
*
)を変数とする連立一次方程式であり、前記潜在変数(z)の中に該連立一次方程式の係数および定数項が含まれることが好ましい。
【0008】
また本発明によれば、上記数値計算方法を実行させるコンピュータプログラムが提供される。
また本発明によれば、上記コンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体が提供される。
また本発明によれば、上記コンピュータプログラムを実行するコンピュータを含む装置が提供される。
【発明の効果】
【0009】
本発明では、推論時に正しい数値解が求めることができる。
【図面の簡単な説明】
【0010】
本発明の方法における機械学習モデルの構成の一例を示す。
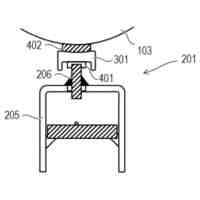
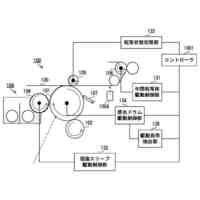
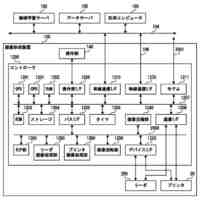
本発明の方法を実施する装置の構成の一例を示す。
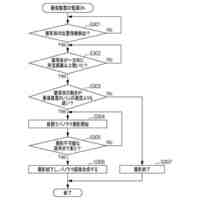
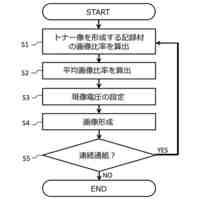
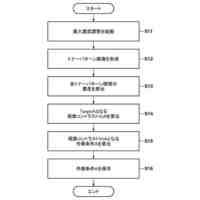
本発明の方法における機械学習モデルの訓練フローチャートの一例を示す。
本発明の方法における機械学習モデルの推論フローチャートの一例を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
清掃装置
20日前
キヤノン株式会社
現像装置
21日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
現像装置
21日前
キヤノン株式会社
記録装置
9日前
キヤノン株式会社
通信装置
9日前
キヤノン株式会社
現像装置
21日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
通信装置
21日前
キヤノン株式会社
撮像装置
20日前
キヤノン株式会社
光走査装置
14日前
キヤノン株式会社
光走査装置
1日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像処理装置
13日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像処理装置
2日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
26日前
キヤノン株式会社
静電捕集装置
20日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
静電捕集装置
20日前
キヤノン株式会社
情報処理装置
5日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
撮像システム
15日前
キヤノン株式会社
記録素子基板
7日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像処理装置
2日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
撮影システム
13日前
キヤノン株式会社
画像形成装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ